Get Curve Spline Points Example (VBA) - 2021 - SOLIDWORKS Design Help
varSplineParams = curve.GetBCurveParams(False)
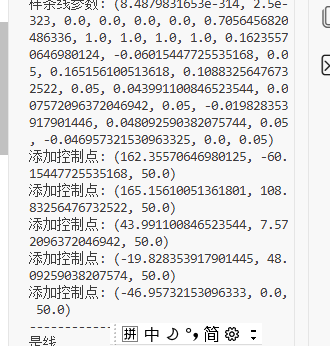
后11位是控制点的3维坐标
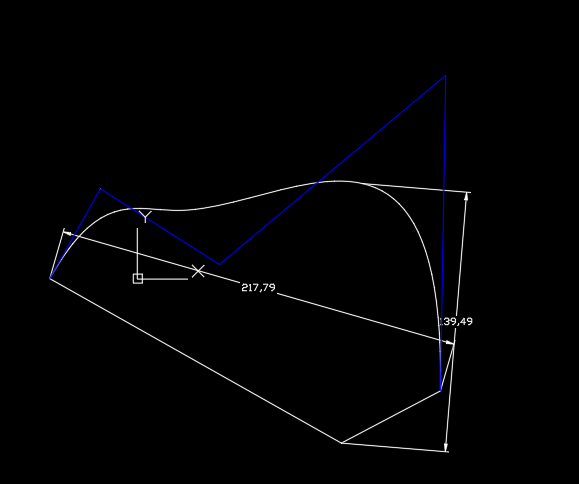
用ezdxf画一下,可以看到控制点不是节点,要算obb就没办法直接用这个控制点
python
import win32com.client
import pythoncom
import math
import numpy as np
from win32com.client import VARIANT
import ezdxf
import os
from uuid import uuid4
def get_selected_faces_edges_and_obb():
"""
获取SolidWorks中选中面的所有边,并计算这些边的OBB包围盒
"""
try:
# 初始化COM库
pythoncom.CoInitialize()
# 连接到SolidWorks应用程序
sw_app = win32com.client.Dispatch("SldWorks.Application")
# 获取活动文档
active_doc = sw_app.ActiveDoc
if not active_doc:
print("没有打开的文档")
return False
# 检查是否为零件文档 (1表示零件文档)
if active_doc.GetType != 1:
print("当前文档不是零件文档")
return False
# 获取选中的对象
selected_objects = active_doc.SelectionManager.GetSelectedObjectsComponent4(1, -1)
# 获取选中的面
selected_faces = []
sel_mgr = active_doc.SelectionManager
face_count = sel_mgr.GetSelectedObjectCount2(-1)
for i in range(1, face_count + 1):
face = sel_mgr.GetSelectedObject6(i, -1)
if face:
selected_faces.append(face)
if not selected_faces:
print("未选中任何面")
return False
# 提取所有选中面上的边
all_points = []
spline_control_points = [] # 专门存储样条线控制点用于绘制
print(f"selected_faces数:{len(selected_faces)}")
for face in selected_faces:
# 获取面上的所有边
edges = face.GetEdges
print(f"面上的边数:{len(edges)}")
if edges:
for edge in edges:
if edge:
# 获取边的起点和终点
print("-------------------------")
curve = edge.GetCurve
if curve.IsCircle:
print("是圆")
if curve.IsLine:
print("是线")
start_pt = edge.GetStartVertex.GetPoint
end_pt = edge.GetEndVertex.GetPoint
print(f"线起点: {start_pt}")
print(f"线终点: {end_pt}")
# 转换为毫米单位并添加到点列表
all_points.append((
start_pt[0] * 1000,
start_pt[1] * 1000,
start_pt[2] * 1000
))
all_points.append((
end_pt[0] * 1000,
end_pt[1] * 1000,
end_pt[2] * 1000
))
if curve.IsBcurve:
print("是样条线")
varSplineParams = curve.GetBCurveParams(False)
print(f"样条线参数: {varSplineParams}")
# 按3个一组的方式处理控制点坐标并加入all_points
if varSplineParams and len(varSplineParams) > 11:
control_points = varSplineParams[11:] # 去掉前11位
# 每3个元素为一组(x,y,z),转换为毫米单位并添加到all_points
for i in range(0, len(control_points) - 2, 3):
if i + 2 < len(control_points):
point_mm = (
control_points[i] * 1000, # X坐标
control_points[i + 1] * 1000, # Y坐标
control_points[i + 2] * 1000 # Z坐标
)
all_points.append(point_mm)
spline_control_points.append(point_mm) # 保存用于绘制
print(f"添加控制点: {point_mm}")
if curve.IsEllipse:
print("是椭圆")
# 去重点坐标
unique_points = list(set(all_points))
print(f"唯一三维点数: {len(unique_points)}")
if len(unique_points) < 2:
print("点数不足,无法计算包围盒")
return False
# 投影到XY平面进行2D OBB计算(假设主要关注XY平面)
points_2d = [(p[0], p[1]) for p in unique_points]
points_2d = list(set(points_2d)) # 再次去重
print(f"二维投影点数: {len(points_2d)}")
# 绘制控制点到DXF文件
if spline_control_points:
draw_control_points_to_dxf(active_doc, spline_control_points)
# 计算OBB包围盒
obb_result = calculate_obb(points_2d)
if obb_result:
print("OBB包围盒计算结果:")
print(f" 角度: {obb_result['angle']:.2f}度")
print(f" 宽度: {obb_result['width']:.3f} mm")
print(f" 高度: {obb_result['height']:.3f} mm")
print(f" 面积: {obb_result['area']:.3f} mm²")
print(f" 中心点: ({obb_result['center'][0]:.3f}, {obb_result['center'][1]:.3f}) mm")
# 输出角点坐标
print(" 角点坐标:")
for i, corner in enumerate(obb_result['corners']):
print(f" 角点{i+1}: ({corner[0]:.3f}, {corner[1]:.3f}) mm")
return obb_result
except Exception as e:
print(f"发生错误: {e}")
return False
finally:
# 清理COM资源
pythoncom.CoUninitialize()
def draw_control_points_to_dxf(sw_document, control_points):
"""
将控制点绘制到DXF文件并保存在SolidWorks文档同目录下
"""
try:
# 创建新的DXF文档
doc = ezdxf.new(dxfversion='R2010')
msp = doc.modelspace()
# 绘制点
for point in control_points:
msp.add_point((point[0], point[1]))
# 获取SolidWorks文档路径
sw_file_path = sw_document.GetPathName
if sw_file_path:
# 获取目录路径
directory = os.path.dirname(sw_file_path)
# 生成文件名
filename = f"控制点{uuid4().hex}.dxf"
full_path = os.path.join(directory, filename)
# 保存DXF文件
doc.saveas(full_path)
print(f"控制点已保存到: {full_path}")
else:
# 如果文档未保存,则保存到当前工作目录
filename = f"控制点{uuid4().hex}.dxf"
doc.saveas(filename)
print(f"控制点已保存到: {os.path.abspath(filename)}")
except Exception as e:
print(f"绘制控制点时出错: {e}")
def rotate_point(point, angle, center=(0, 0)):
"""绕指定中心点旋转点"""
x, y = point
cx, cy = center
x -= cx
y -= cy
rad = math.radians(angle)
cos_rad, sin_rad = math.cos(rad), math.sin(rad)
new_x = x * cos_rad - y * sin_rad
new_y = x * sin_rad + y * cos_rad
new_x += cx
new_y += cy
return (new_x, new_y)
def get_bounding_box_area(points, angle):
"""计算给定角度下的包围盒面积和边界信息"""
rotated_points = [rotate_point(p, -angle) for p in points]
x_coords = [p[0] for p in rotated_points]
y_coords = [p[1] for p in rotated_points]
min_x, max_x = min(x_coords), max(x_coords)
min_y, max_y = min(y_coords), max(y_coords)
width = max_x - min_x
height = max_y - min_y
area = width * height
return area, (min_x, max_x, min_y, max_y)
def ternary_search_min_area(points, left, right, eps=1e-6):
"""使用三分法搜索最小面积角度"""
while right - left > eps:
mid1 = left + (right - left) / 3
mid2 = right - (right - left) / 3
area1, _ = get_bounding_box_area(points, mid1)
area2, _ = get_bounding_box_area(points, mid2)
if area1 < area2:
right = mid2
else:
left = mid1
optimal_angle = (left + right) / 2
min_area, bounds = get_bounding_box_area(points, optimal_angle)
return optimal_angle, min_area, bounds
def calculate_obb(points):
"""计算最小面积包围矩形"""
if len(points) < 2:
return None
# 首先找到一个较好的初始角度范围
angles_to_check = []
# 使用较小步长进行初步搜索
for i in range(0, 180, 2):
angles_to_check.append(i)
# 找到距离最远的点对
max_dist = 0
farthest_pair = None
for i in range(len(points)):
for j in range(i+1, len(points)):
dist = math.sqrt((points[i][0]-points[j][0])**2 + (points[i][1]-points[j][1])**2)
if dist > max_dist:
max_dist = dist
farthest_pair = (points[i], points[j])
if farthest_pair:
p1, p2 = farthest_pair
angle = math.degrees(math.atan2(p2[1] - p1[1], p2[0] - p1[0]))
angles_to_check.extend([angle, angle + 90])
angles_to_check = list(set([a % 180 for a in angles_to_check]))
# 找到初步的最小面积角度
min_area = float('inf')
best_angle = 0
best_bounds = None
for angle in angles_to_check:
area, bounds = get_bounding_box_area(points, angle)
if area < min_area:
min_area = area
best_angle = angle
best_bounds = bounds
# 在最优角度附近使用三分法进行精细搜索
search_range = 5 # 搜索范围±5度
left_angle = (best_angle - search_range) % 180
right_angle = (best_angle + search_range) % 180
# 处理跨越0度的情况
if left_angle > right_angle:
# 在[0, right_angle]和[left_angle, 180]两个区间分别搜索
optimal_angle1, min_area1, bounds1 = ternary_search_min_area(points, 0, right_angle)
optimal_angle2, min_area2, bounds2 = ternary_search_min_area(points, left_angle, 180)
if min_area1 < min_area2:
optimal_angle = optimal_angle1
min_area = min_area1
best_bounds = bounds1
else:
optimal_angle = optimal_angle2
min_area = min_area2
best_bounds = bounds2
else:
optimal_angle, min_area, best_bounds = ternary_search_min_area(points, left_angle, right_angle)
# 构造最终的包围盒
min_x, max_x, min_y, max_y = best_bounds
width = max_x - min_x
height = max_y - min_y
# 计算旋转后的四个角点
rotated_corners = [
(min_x, min_y),
(max_x, min_y),
(max_x, max_y),
(min_x, max_y)
]
# 将角点旋转回原始坐标系
corners = [rotate_point(p, optimal_angle) for p in rotated_corners]
center_x = (min_x + max_x) / 2
center_y = (min_y + max_y) / 2
center_original = rotate_point((center_x, center_y), optimal_angle)
return {
'type': 'OBB',
'corners': corners,
'width': width,
'height': height,
'area': min_area,
'angle': optimal_angle,
'center': center_original
}
# 主函数调用示例
if __name__ == "__main__":
get_selected_faces_edges_and_obb()