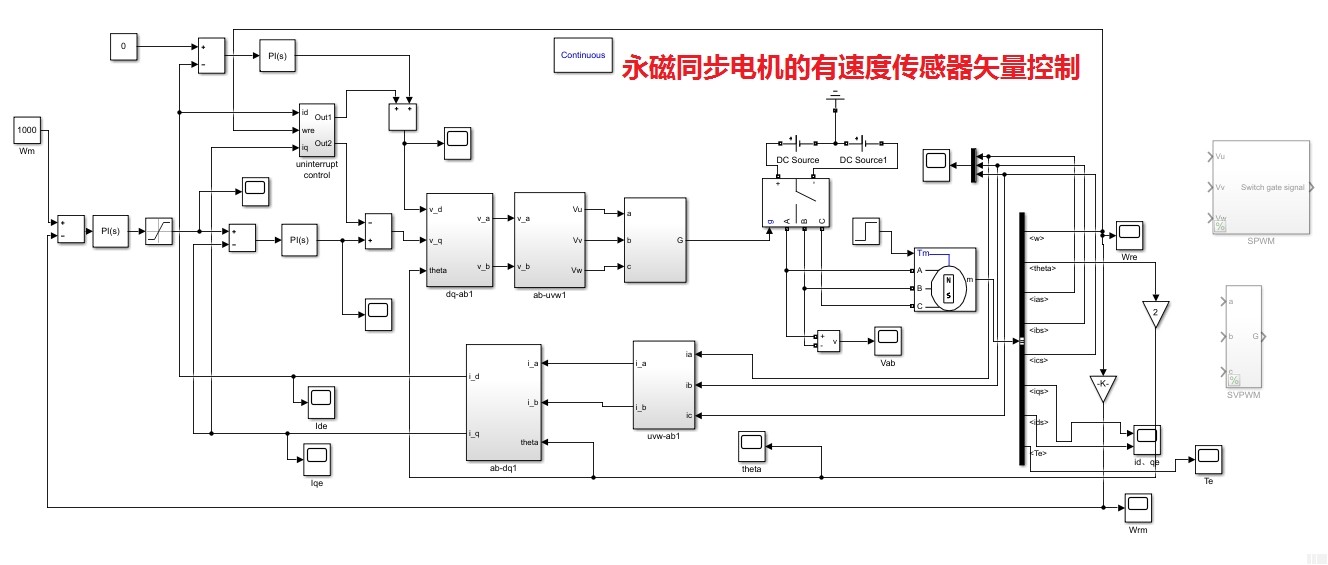
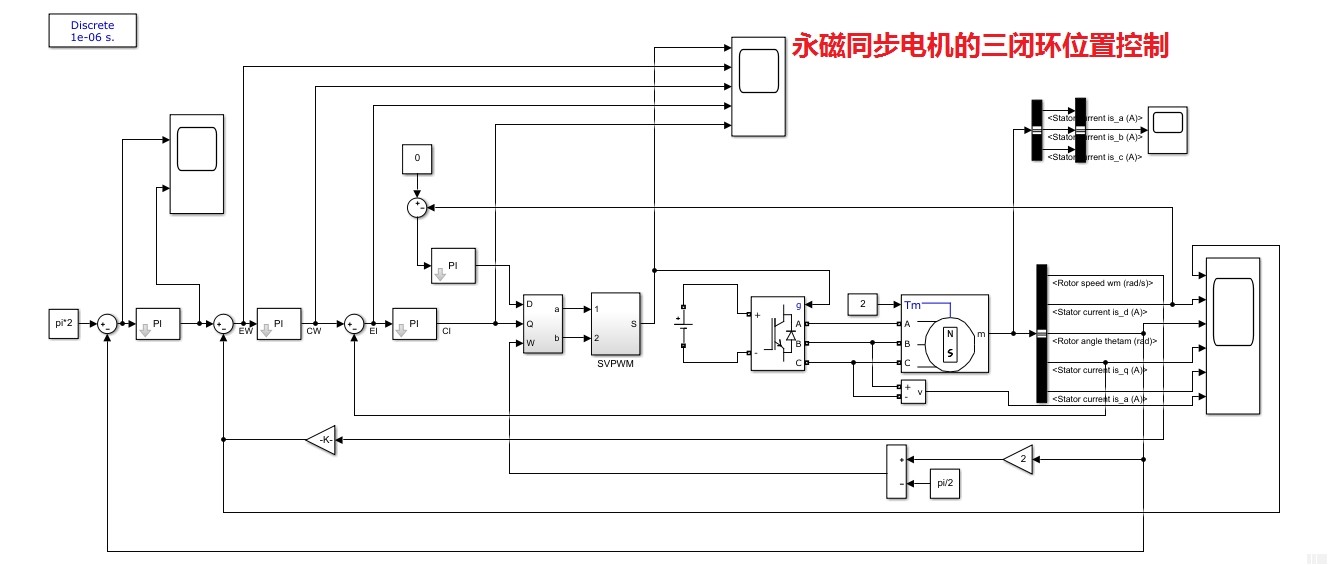
永磁同步电机的控制算法仿真模型: 1. 永磁同步电机的MRAS无传感器矢量控制: 2. 永磁同步电机的SMO无传感器矢量控制(反正切+锁相环); 3. 永磁同步电机DTC直接转矩控制; 4. 永磁同步电机的有传感器矢量控制; 5. 永磁同步电机的位置控制 永磁同步电机的控制算法仿真模型: 基于ADRC自抗扰算法的PMSM双闭环转速控制 基于RLS的永磁同步电机的参数辨识 基于卡尔曼滤波的永磁同步电机无传感器矢量控制_2014a 永磁同步电机DTC直接转矩控制仿真模型 永磁同步电机MTPA控制算法仿真模型 永磁同步电机的MRAS无传感器矢量控制 永磁同步电机的SMO无传感器矢量控制 永磁同步电机的磁场定向控制(矢量控制) 永磁同步电机的磁链观测 永磁同步电机的电流滞环控制 永磁同步电机的反歩控制 永磁同步电机的高频注入 永磁同步电机的模型预测控制 永磁同步电机矢量控制+MTPV+MTPA算法(弱磁控制)仿真simulink模型 永磁同步电机位置控制 PMSM矢量控制模型
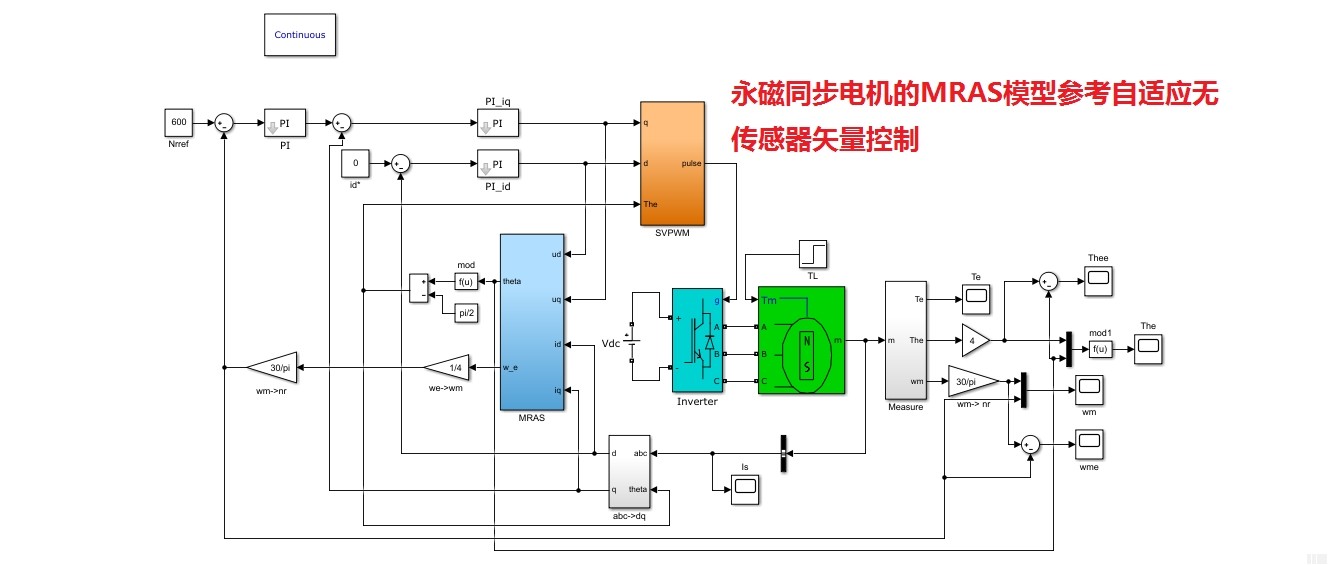
今天咱们来扒一扒永磁同步电机那些有意思的控制算法仿真,特别是Simulink模型里藏着的小秘密。搞过电机控制的都知道,无传感器算法就像玩密室逃脱------总得找点线索才能定位转子位置。先说说MRAS这个老江湖,它的自适应机制贼有意思。
看这段模型里的自适应率代码:
matlab
function dtheta = MRAS_adaptation(e_id, e_iq, Ld, Lq)
gamma = 0.05; % 这个增益参数比女朋友脾气还难调
dtheta = gamma * (e_id * (Lq - Ld)*i_q - e_iq * (Lq - Ld)*i_d);
end这里用电流误差来修正角度估计,Ld和Lq参数要是给不准,整个模型就开始跳机械舞。有个骚操作是把这里的固定gamma改成动态调整,用个PID包裹一下,能让收敛速度快20%。
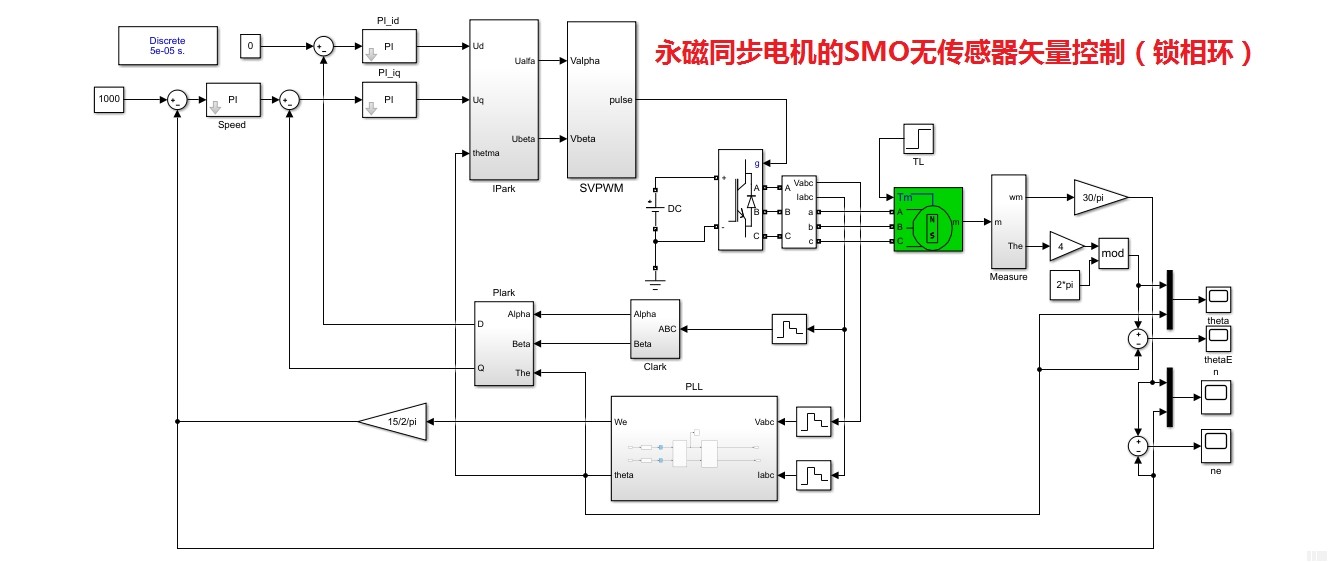
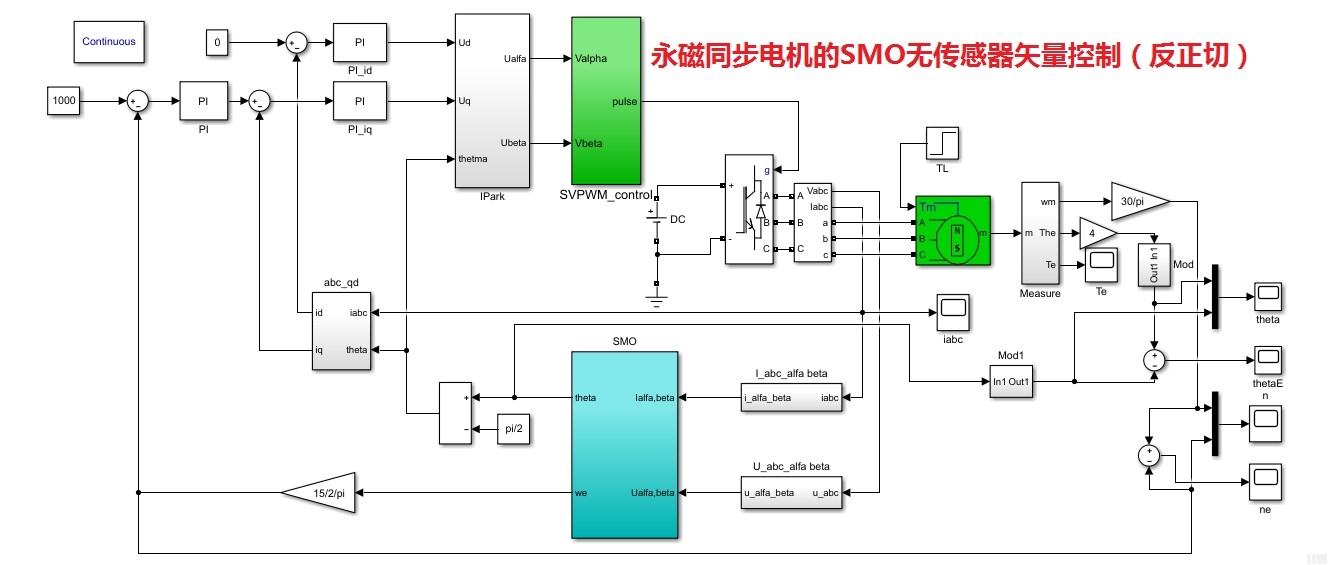
再说说SMO滑模观测器,这玩意儿自带抗干扰属性。模型里常见这种开关函数:
c
// 滑模面计算
float s_alpha = est_i_alpha - meas_i_alpha;
float s_beta = est_i_beta - meas_i_beta;
float H = (s > 0) ? 1 : -1; // 开关函数但实测用饱和函数tanh(s/k)代替符号函数,能把高频抖振压得像熨斗烫过一样平。锁相环部分要注意带宽设置,太宽了就跟喝醉似的乱抖,太窄了响应速度又像树懒。
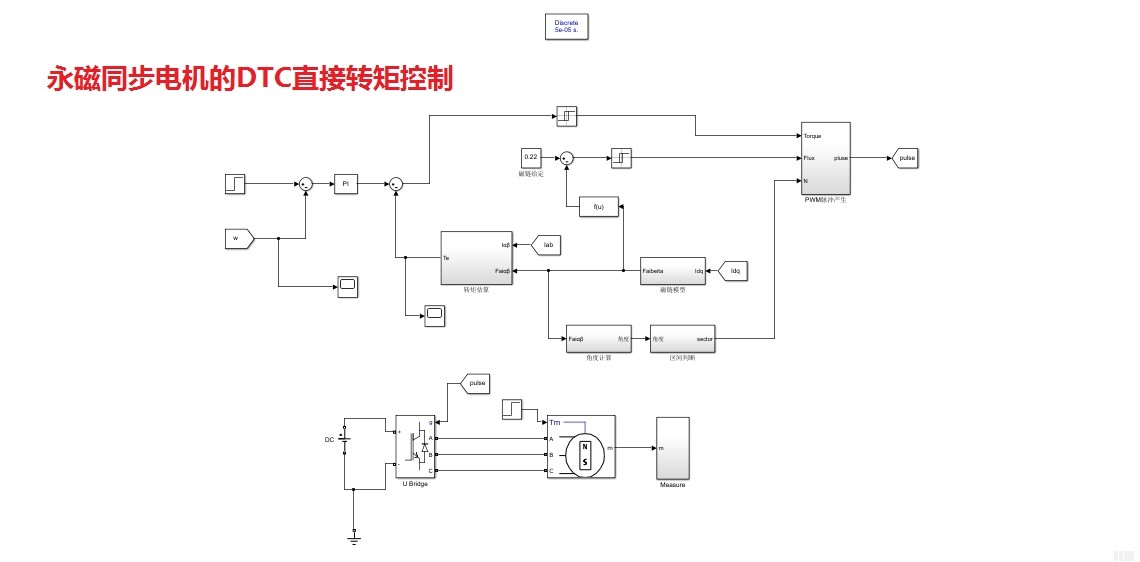
DTC直接转矩控制才是真·暴力美学,不用坐标变换直接硬刚。看这个开关表逻辑:
python
torque_status = 1 if (T_ref - T_est) > hysteresis else -1
# 磁链滞环状态
flux_status = 1 if (Ψ_ref - Ψ_est) > hysteresis else -1
# 查表选择电压矢量
voltage_vector = switching_table[torque_status+1][flux_status+1]但实测中滞环宽度得跟着转速动态调整,低速时要收窄不然转矩脉动能震得手麻。有个邪道玩法是把开关表换成模糊逻辑,效果意外地好。
ADRC自抗扰控制最近挺火,这个扩张状态观测器代码看着就带感:
matlab
function ESO = ADRC_ESO(u, y)
persistent z1 z2 z3
beta01 = 100; % 观测器带宽参数
beta02 = 300;
beta03 = 1000;
e = z1 - y;
dz1 = z2 - beta01*e;
dz2 = z3 - beta02*e + 0.5*u; % 这里的0.5是电机增益
dz3 = -beta03*e;
% 更新状态
z1 = z1 + dz1*Ts;
z2 = z2 + dz2*Ts;
z3 = z3 + dz3*Ts;
ESO = [z1; z2; z3];
end调参时要把三个beta参数按带宽的1,3,5倍关系设置,能兼顾跟踪速度和抗扰性。注意别让观测器跑得比实际系统快太多,否则数值不稳定分分钟教你做人。
最后说个坑:所有无传感器算法在零速附近都会露怯。这时候得祭出高频注入法,模型里加个20kHz的正弦信号注入,然后像捞针一样从电流响应里提取位置信号。不过要当心PWM开关噪声,滤波器的相位延迟能坑死人。
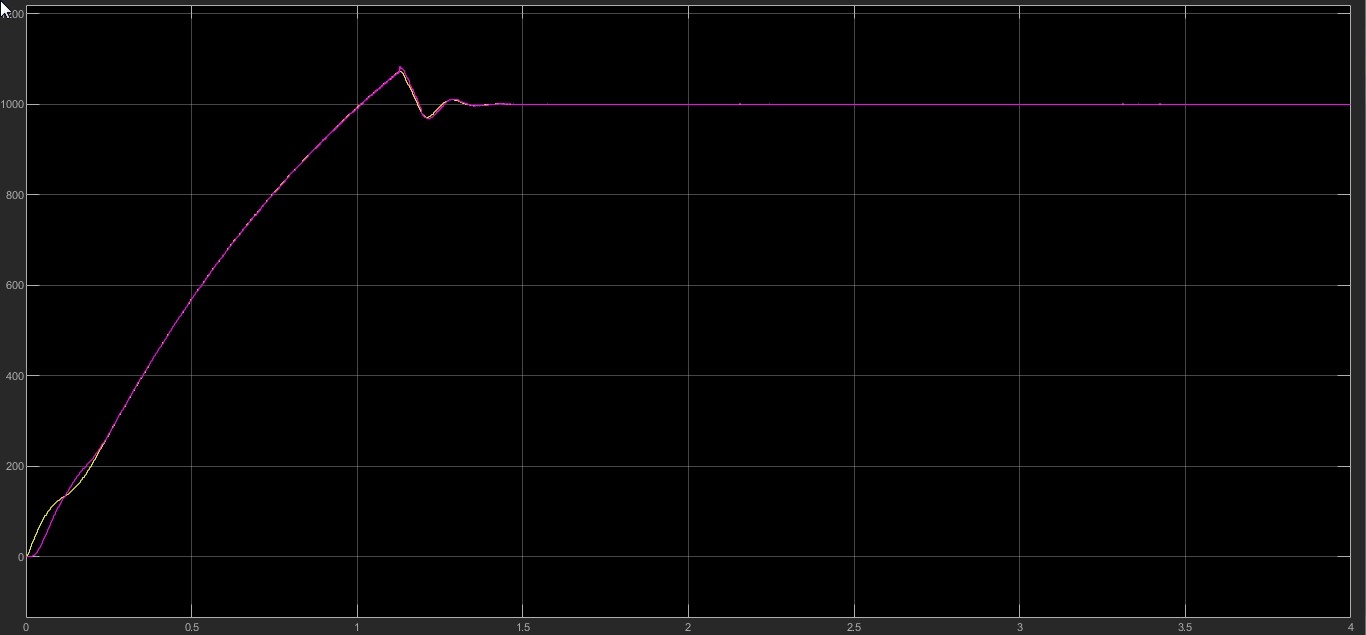
仿真时建议先把机械时间常数设小点(比如0.1s),能省下大量等待时间。等算法调通了再改回实际参数,毕竟没人想盯着屏幕看十分钟才出一个波形。