这里强烈安利 鱼香ROS 大大的ROS一键安装教程!
接下来我将按照大大的安装教程走一遍ROS的安装流程。
bash
wget http://fishros.com/install -O fishros && . fishros会出现:
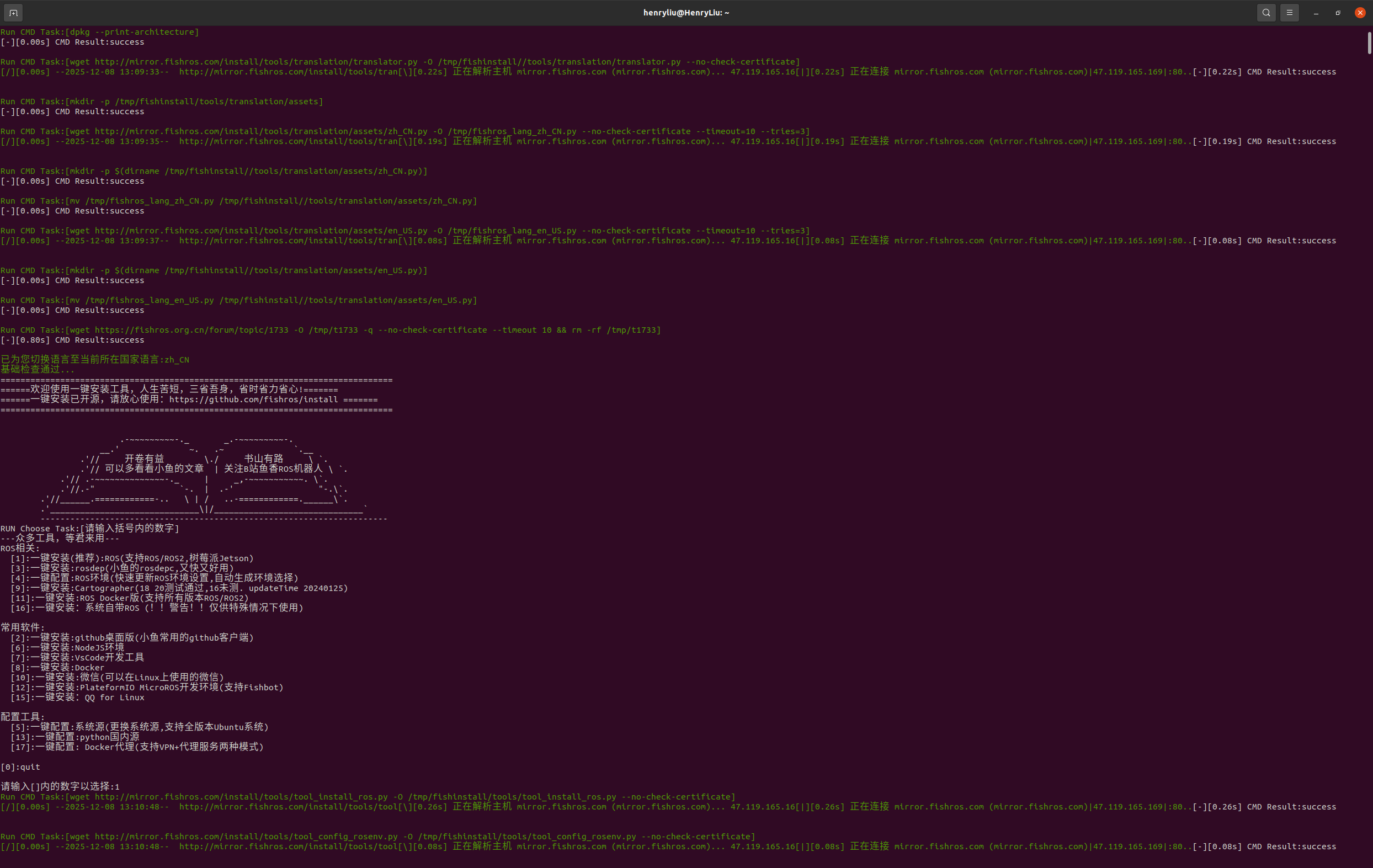
选择1,1:一键安装(推荐):ROS(支持ROS/ROS2,树莓派Jetson)
然后选择:2:不更换继续安装
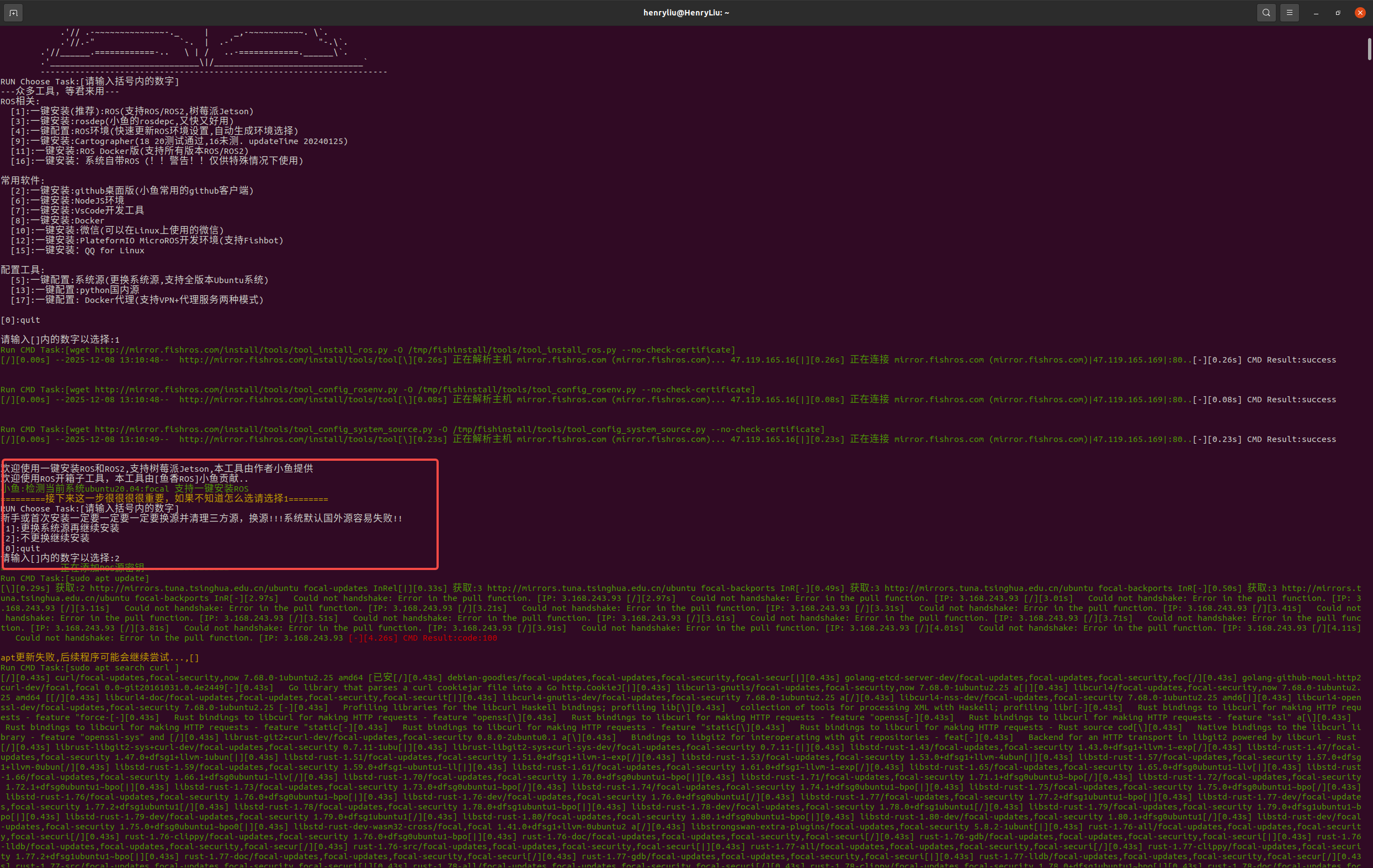
然后会进入这个界面:
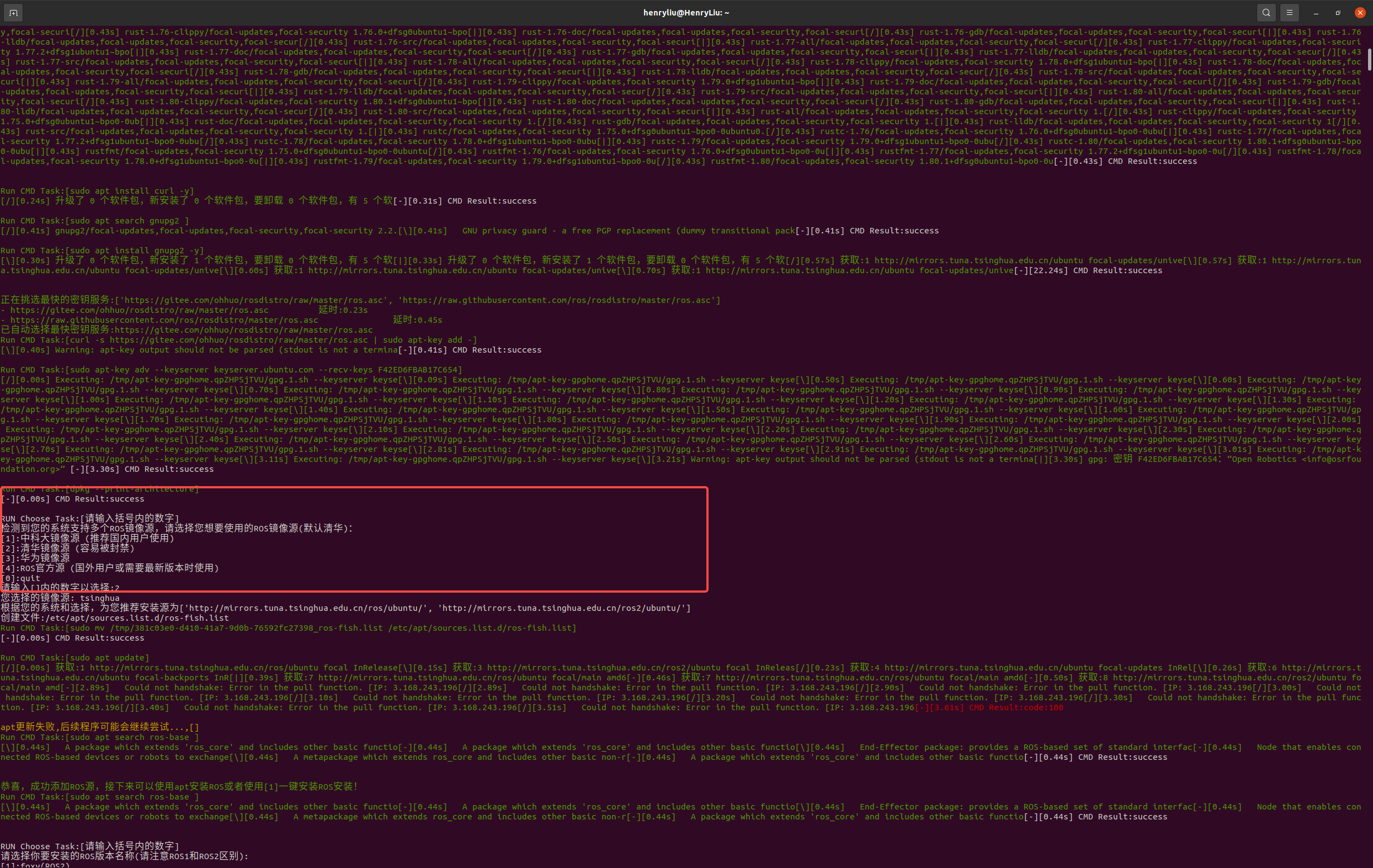
这里我用的2:清华源
然后分别选择
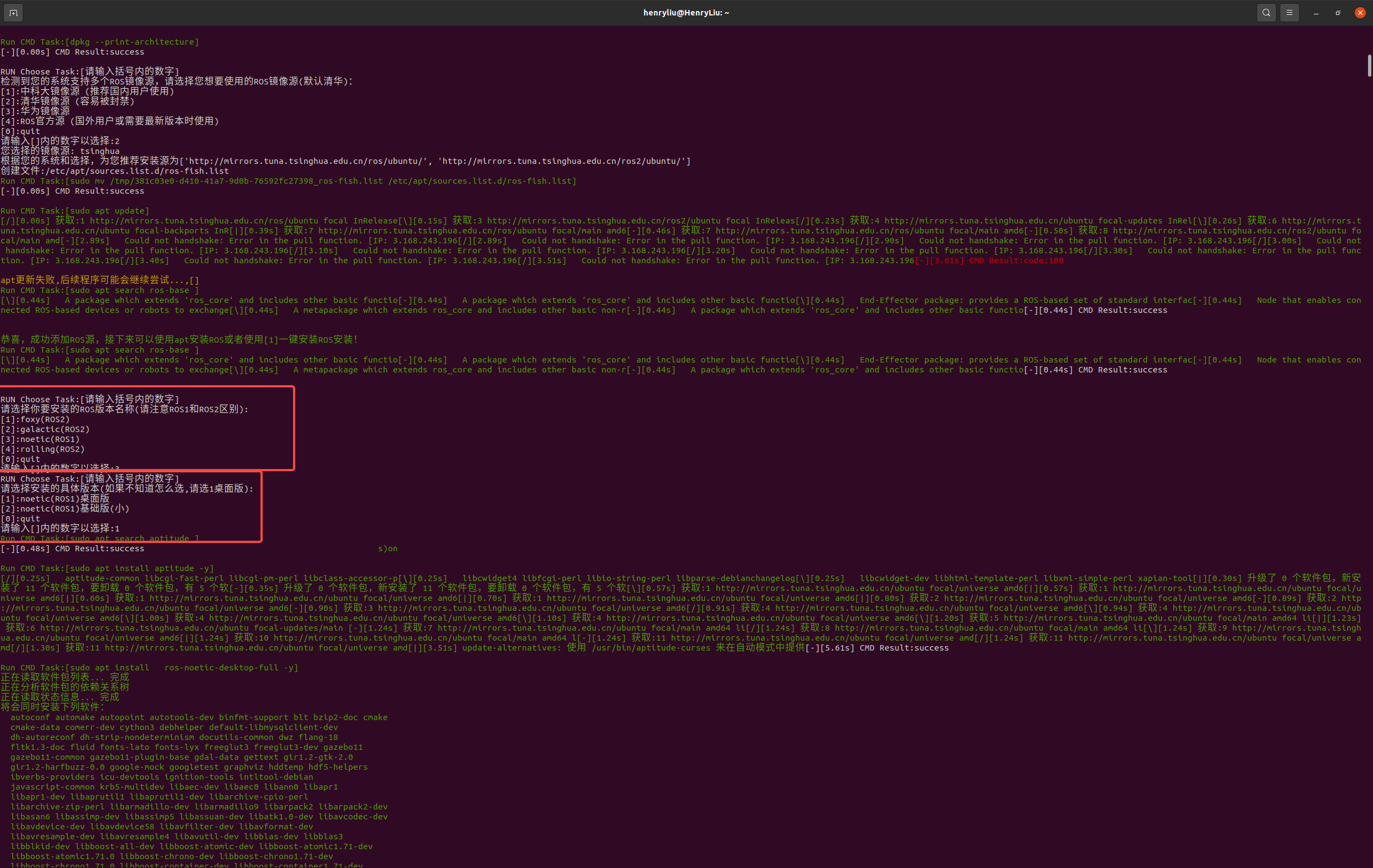
3:noetic(ROS1)
1:noetic(ROS1)桌面版
安装好后,新打开一个终端,然后运行:
bash
roscore
这样就是安装完成了!
还可以试一下小乌龟程序,之前的终端不要关闭,打开新的终端,输入:
bash
rosrun turtlesim turtlesim_node出现:
之前的终端不要关闭,再打开第三个终端,输入:
bash
rosrun turtlesim turtle_teleop_key
把鼠标放在第三个终端,即可对小乌龟进行控制~