Stewart六自由度平台反解算法,c#
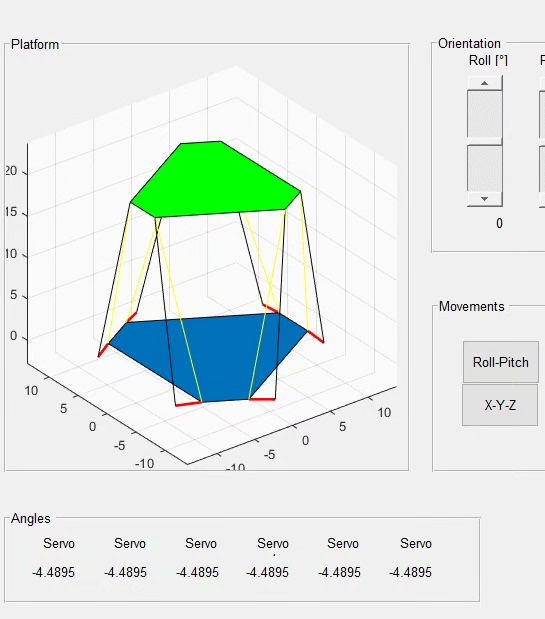
直接上干货,今天咱们聊聊怎么用C#实现Stewart平台的逆解算法。这玩意儿说白了就是已知平台的位置和姿态,反推六个腿该伸多长。先别急着掏线性代数教材,咱们先画个流程图:
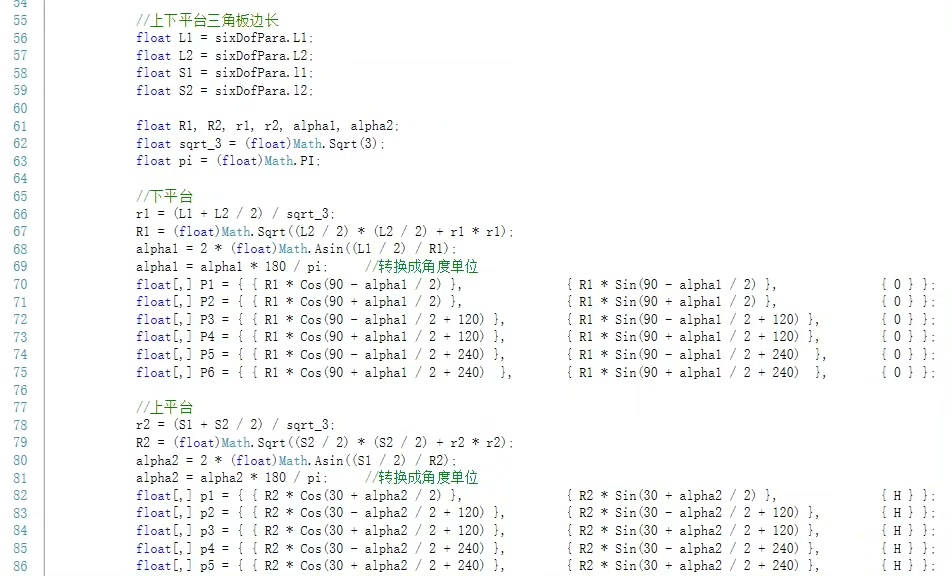
- 确定上下平台坐标系
- 计算各球铰点的空间坐标
- 算腿向量长度
- 搞定!
先整个结构体存平台参数:
csharp
public struct StewartPlatform
{
public float BaseRadius; // 下平台半径
public float TopRadius; // 上平台半径
public float[][] BaseAngles;// 下平台安装角度(6个)
public float[][] TopAngles; // 上平台安装角度(6个)
public float ServoOffset; // 舵机零位偏移
}姿态转换是重点,这里用欧拉角转旋转矩阵:
csharp
float[] EulerToRotationMatrix(float roll, float pitch, float yaw)
{
float cr = MathF.Cos(roll), sr = MathF.Sin(roll);
float cp = MathF.Cos(pitch), sp = MathF.Sin(pitch);
float cy = MathF.Cos(yaw), sy = MathF.Sin(yaw);
return new float[9] {
cy*cp, cy*sp*sr - sy*cr, cy*sp*cr + sy*sr,
sy*cp, sy*sp*sr + cy*cr, sy*sp*cr - cy*sr,
-sp, cp*sr, cp*cr
};
}
// 注意顺序:Z-Y-X旋转,别搞反了!核心的逆解算法来了:
csharp
float[] CalculateLegLengths(StewartPlatform platform, float[] position, float[] euler)
{
float[] R = EulerToRotationMatrix(euler[0], euler[1], euler[2]);
float[] lengths = new float[6];
for (int i = 0; i < 6; i++)
{
// 计算上下平台铰点坐标
float baseAngle = platform.BaseAngles[i];
Vector3 basePoint = new Vector3(
platform.BaseRadius * MathF.Cos(baseAngle),
platform.BaseRadius * MathF.Sin(baseAngle),
0);
float topAngle = platform.TopAngles[i];
Vector3 topPointLocal = new Vector3(
platform.TopRadius * MathF.Cos(topAngle),
platform.TopRadius * MathF.Sin(topAngle),
0);
// 坐标转换:旋转+平移
Vector3 topPointGlobal = new Vector3(
R[0] * topPointLocal.X + R[1] * topPointLocal.Y + R[2] * topPointLocal.Z + position[0],
R[3] * topPointLocal.X + R[4] * topPointLocal.Y + R[5] * topPointLocal.Z + position[1],
R[6] * topPointLocal.X + R[7] * topPointLocal.Y + R[8] * topPointLocal.Z + position[2]);
// 计算腿向量长度
Vector3 legVector = topPointGlobal - basePoint;
lengths[i] = legVector.Length() - platform.ServoOffset;
}
return lengths;
}
// 注意这里用右手坐标系,Z轴向上几个容易踩坑的地方:
- 角度单位:确保所有三角函数参数都是弧度
- 安装方向:上下平台的点排列顺序要对应
- 零位校准:ServoOffset要根据实际机械结构测量
- 数值稳定性:当平台接近奇异位形时要加保护
实测时可以用这个测试用例验证:
csharp
// 初始位姿(平台水平,高度1米)
float[] testPos = new float[3] { 0, 0, 1000 };
float[] testEuler = new float[3] { 0, 0, 0 };
var lengths = CalculateLegLengths(myPlatform, testPos, testEuler);
// 六个腿长度应该相等(误差<1mm)最后别忘了单位转换------机械设计常用毫米,算法中用米会更方便。代码里可以加个转换系数:
csharp
const float MetersToMillimeters = 1000f;
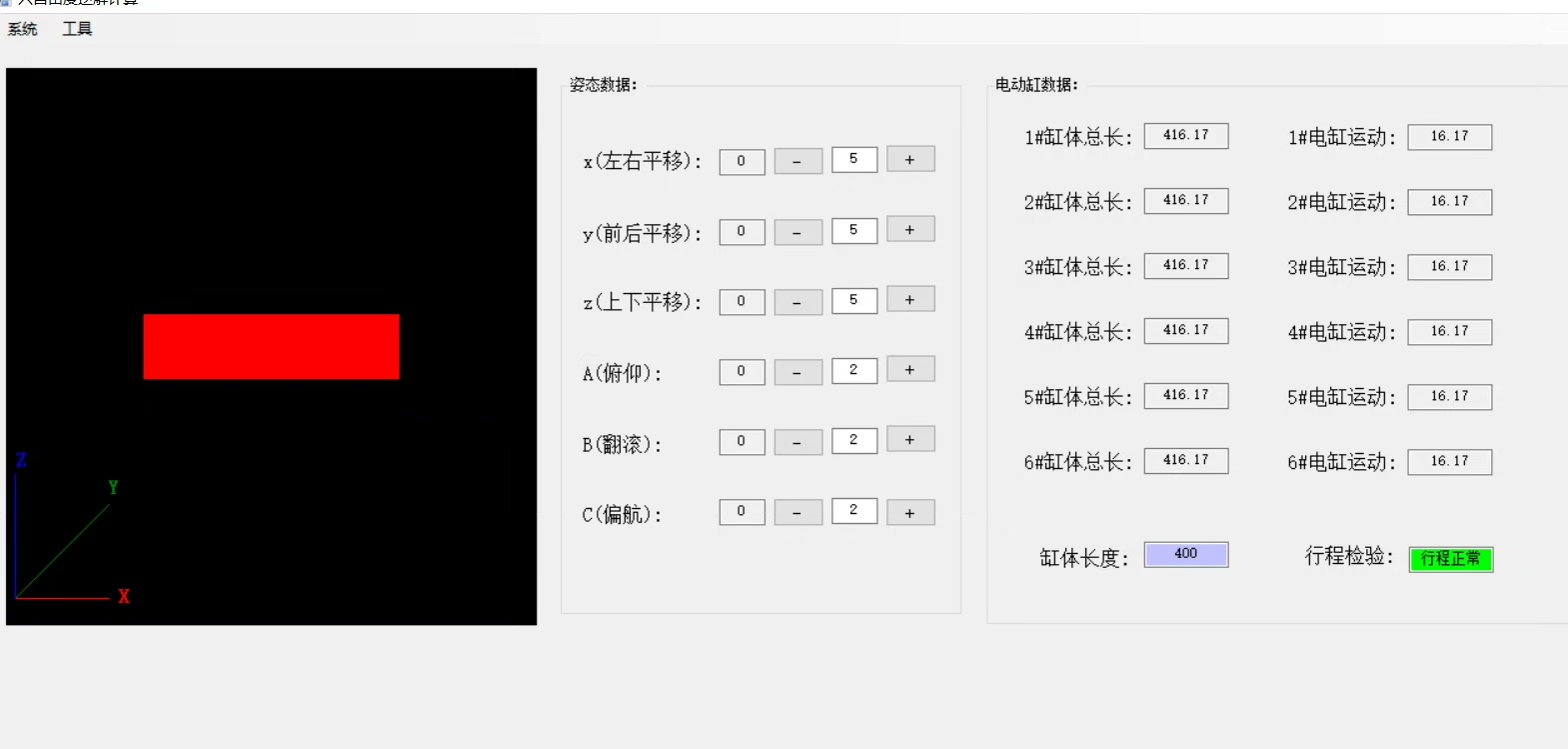
// 输入位置用毫米的话记得除以这个系数实际项目里可能还要处理:
- 行程限制检查
- 运动学奇异性检测
- 关节角度限位
- 速度/加速度约束
这个算法实测在Unity里驱动虚拟平台能达到60fps,移植到真实控制器时要注意浮点运算精度。下次可以聊聊正解算法------那个才是真·头疼的部分。