
pico-sdk-api文档
rp2040-datasheet.pdf
getting-started-with-pico.pdf
树莓派 Pico 之可编程 IO(PIO)
CMakeLists.txt
cmake_minimum_required(VERSION 3.13)
include(pico_sdk_import.cmake)
project(pio_squarewave C CXX ASM)
pico_sdk_init()
add_executable(pio_squarewave
main.c
pio_spi.c
spi.pio
)
pico_generate_pio_header(pio_squarewave ${CMAKE_CURRENT_LIST_DIR}/spi.pio)
target_link_libraries(pio_squarewave pico_stdlib hardware_pio)
pico_add_extra_outputs(pio_squarewave)
spi.pio
;
; 版权所有 (c) 2020 Raspberry Pi (Trading) Ltd.
;
; SPDX-License-Identifier: BSD-3-Clause
;
; 本程序实现全双工 SPI,SCK 时钟周期为 4 个系统时钟周期。
; 针对 CPHA 的两个取值(0 或 1)分别提供不同的程序。
; CPOL 则依靠 GPIO 输出反相功能在硬件中实现,而无需修改 PIO 程序。
;
; 若只需要发送(TX only),SPI 可工作在两倍速度(参见 ST7789 示例)。
.program spi_cpha0
.side_set 1
; 引脚分配:
; - SCK 使用 side-set 引脚 0
; - MOSI 使用 OUT 引脚 0
; - MISO 使用 IN 引脚 0
;
; 必须启用 autopush/autopull(自动入栈/出栈),序列帧长度由推/拉阈值决定。
; 可选择左移或右移,但数据对齐需自行保证。
; 对于 8 位或 16 位帧,可利用 RP2040 IO 结构的窄存储复制/窄加载特性,方便数据对齐。
; CPHA = 0:数据在 SCK 上升沿采样,在下降沿改变;第一上升沿即有效。
out pins, 1 side 0 [1] ; 若 TX FIFO 为空则会停在这里(side-set 不受 out stall 影响,因此保持 SCK 为低)
in pins, 1 side 1 [1] ; 读取 MISO,产生 SCK 上升沿
.program spi_cpha1
.side_set 1
; CPHA = 1:数据在 SCK 上升沿改变,在下降沿采样。
out x, 1 side 0 ; 若 TX FIFO 为空则停在这里(保持 SCK 未拉高)
mov pins, x side 1 [1] ; 输出 MOSI 数据,并产生 SCK 上升沿(mov pins 使用 OUT 映射)
in pins, 1 side 0 ; 读取 MISO,并拉低 SCK
% c-sdk {
#include "hardware/gpio.h"
static inline void pio_spi_init(PIO pio, uint sm, uint prog_offs, uint n_bits,
float clkdiv, bool cpha, bool cpol, uint pin_sck, uint pin_mosi, uint pin_miso) {
// 根据 CPHA 选择对应的 PIO 程序
pio_sm_config c = cpha ?
spi_cpha1_program_get_default_config(prog_offs) :
spi_cpha0_program_get_default_config(prog_offs);
// 配置 MOSI(输出)、MISO(输入)、SCK(side-set)
sm_config_set_out_pins(&c, pin_mosi, 1);
sm_config_set_in_pins(&c, pin_miso);
sm_config_set_sideset_pins(&c, pin_sck);
// 本示例仅支持 MSB-first(移位方向固定)
sm_config_set_out_shift(&c, false, true, n_bits);
sm_config_set_in_shift(&c, false, true, n_bits);
// 设置 SPI 时钟分频
sm_config_set_clkdiv(&c, clkdiv);
// 将 MOSI、SCK 输出初始化为低,MISO 设为输入
pio_sm_set_pins_with_mask(
pio, sm, 0,
(1u << pin_sck) | (1u << pin_mosi)
);
pio_sm_set_pindirs_with_mask(
pio, sm,
(1u << pin_sck) | (1u << pin_mosi),
(1u << pin_sck) | (1u << pin_mosi) | (1u << pin_miso)
);
pio_gpio_init(pio, pin_mosi);
pio_gpio_init(pio, pin_miso);
pio_gpio_init(pio, pin_sck);
// 通过 GPIO 输出反相实现 CPOL=1
gpio_set_outover(pin_sck, cpol ? GPIO_OVERRIDE_INVERT : GPIO_OVERRIDE_NORMAL);
// SPI 是同步接口,绕过输入同步器减少输入延迟
hw_set_bits(&pio->input_sync_bypass, 1u << pin_miso);
// 初始化并启动状态机
pio_sm_init(pio, sm, prog_offs, &c);
pio_sm_set_enabled(pio, sm, true);
}
%}
; ============================================================
; 带自动片选(CS)的 SPI
; ============================================================
;
; 功能说明:
; 一旦 TX FIFO 中有数据,CS 自动拉低;
; FIFO 读空后自动拉高;
; 并带有前沿/后沿延迟。
;
; Y 寄存器决定每帧 bit 数(2~32 bit)
;
; 引脚分配:
; - side-set bit0 = SCK
; - side-set bit1 = CSn(片选,低有效)
; - OUT bit0 = MOSI
; - IN bit0 = MISO
;
; 支持 1 个片选,如需多个请使用 GPIO 手动控制。
;
; CPOL 仍通过 GPIO 反相实现;以下仅区分 CPHA。
; ------------------------------------------------------------
; CPHA = 0:在 SCK 上升沿采样,在下降沿变化
; ------------------------------------------------------------
.program spi_cpha0_cs
.side_set 2
.wrap_target
bitloop:
out pins, 1 side 0x0 [1] ; 发送 MOSI,SCK=0
in pins, 1 side 0x1 ; 采样 MISO,SCK=1
jmp x-- bitloop side 0x1 ; 若 x>0,继续循环;SCK=1
out pins, 1 side 0x0 ; 发送最后一位,SCK=0
mov x, y side 0x0 ; 重新装载 bit 计数器(来自 Y)
in pins, 1 side 0x1 ; 采样 MISO,SCK=1
jmp !osre bitloop side 0x1 ; 如果 TX FIFO 未空,继续发送
nop side 0x0 [1] ; 片选 CSn 后沿延迟
public entry_point: ; 启动前必须设置 X,Y = (bit数 - 2)
pull ifempty side 0x2 [1] ; FIFO 空则阻塞,CSn=1(空闲)
.wrap
; ------------------------------------------------------------
; CPHA = 1:在 SCK 上升沿改变数据,在下降沿采样
; ------------------------------------------------------------
.program spi_cpha1_cs
.side_set 2
.wrap_target
bitloop:
out pins, 1 side 0x1 [1] ; SCK=1,输出 MOSI
in pins, 1 side 0x0 ; SCK=0,采样 MISO
jmp x-- bitloop side 0x0
out pins, 1 side 0x1
mov x, y side 0x1
in pins, 1 side 0x0
jmp !osre bitloop side 0x0
public entry_point:
pull ifempty side 0x2 [1] ; FIFO 空则阻塞,CSn=1
nop side 0x0 [1] ; CSn 前沿延迟
.wrap
% c-sdk {
#include "hardware/gpio.h"
static inline void pio_spi_cs_init(PIO pio, uint sm, uint prog_offs, uint n_bits,
float clkdiv, bool cpha, bool cpol,
uint pin_sck, uint pin_mosi, uint pin_miso) {
// 根据 CPHA 选择对应 PIO 程序
pio_sm_config c = cpha ?
spi_cpha1_cs_program_get_default_config(prog_offs) :
spi_cpha0_cs_program_get_default_config(prog_offs);
sm_config_set_out_pins(&c, pin_mosi, 1);
sm_config_set_in_pins(&c, pin_miso);
sm_config_set_sideset_pins(&c, pin_sck);
sm_config_set_out_shift(&c, false, true, n_bits);
sm_config_set_in_shift(&c, false, true, n_bits);
sm_config_set_clkdiv(&c, clkdiv);
// 设置 SCK(2bit),MOSI 输出
pio_sm_set_pins_with_mask(
pio, sm, (2u << pin_sck),
(3u << pin_sck) | (1u << pin_mosi)
);
pio_sm_set_pindirs_with_mask(
pio, sm,
(3u << pin_sck) | (1u << pin_mosi),
(3u << pin_sck) | (1u << pin_mosi) | (1u << pin_miso)
);
pio_gpio_init(pio, pin_mosi);
pio_gpio_init(pio, pin_miso);
pio_gpio_init(pio, pin_sck);
pio_gpio_init(pio, pin_sck + 1); // 片选 CSn
gpio_set_outover(pin_sck, cpol ? GPIO_OVERRIDE_INVERT : GPIO_OVERRIDE_NORMAL);
hw_set_bits(&pio->input_sync_bypass, 1u << pin_miso);
uint entry_point =
prog_offs +
(cpha ? spi_cpha1_cs_offset_entry_point : spi_cpha0_cs_offset_entry_point);
pio_sm_init(pio, sm, entry_point, &c);
pio_sm_exec(pio, sm, pio_encode_set(pio_x, n_bits - 2));
pio_sm_exec(pio, sm, pio_encode_set(pio_y, n_bits - 2));
pio_sm_set_enabled(pio, sm, true);
}
%}
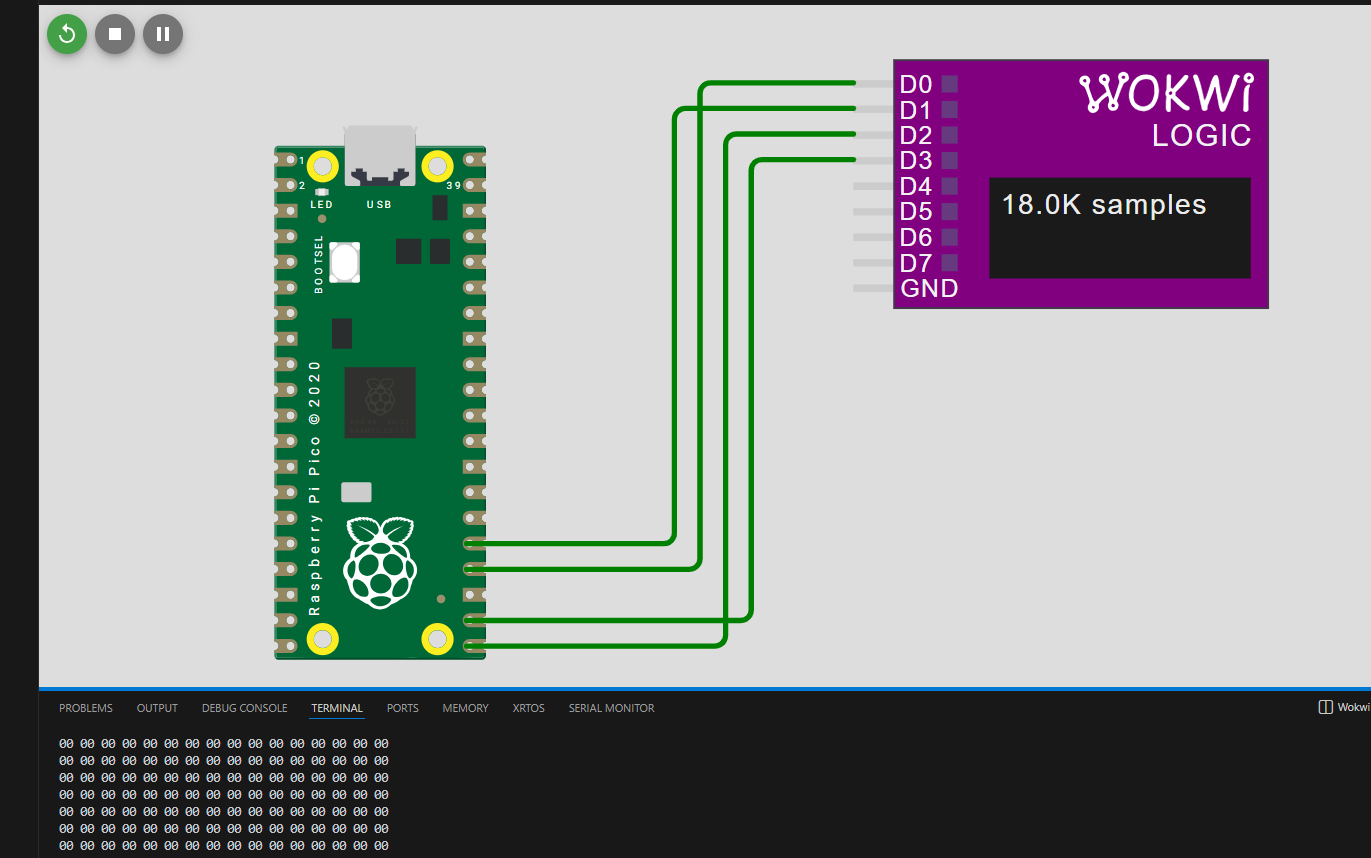
diagram.json
{
"version": 1,
"author": "wang minglie",
"editor": "wokwi",
"parts": [
{
"type": "wokwi-pi-pico",
"id": "pico",
"top": -3.15,
"left": 3.6,
"attrs": { "builder": "pico-sdk" }
},
{ "type": "wokwi-logic-analyzer", "id": "logic1", "top": -28.45, "left": 220.8, "attrs": {} }
],
"connections": [
[ "pico:GP0", "$serialMonitor:RX", "", [] ],
[ "pico:GP1", "$serialMonitor:TX", "", [] ],
[ "pico:GP18", "logic1:D0", "green", [ "h87.6", "v-172.8" ] ],
[ "logic1:D1", "pico:GP19", "green", [ "h-67.2", "v163.2" ] ],
[ "pico:GP16", "logic1:D2", "green", [ "v0", "h97.2", "v-192" ] ],
[ "pico:GP17", "logic1:D3", "green", [ "h106.8", "v-172.8" ] ]
],
"dependencies": {}
}
wokwi.toml
[wokwi]
version = 1
firmware = "cmake-build-debug-pico/pio_squarewave.uf2"
elf = "cmake-build-debug-pico/pio_squarewave.elf"
main.c
/**
* Copyright (c) 2020 Raspberry Pi (Trading) Ltd.
*
* SPDX-License-Identifier: BSD-3-Clause
*/
#include <stdio.h>
#include "pico/stdlib.h"
#include "pico/binary_info.h"
#include "pio_spi.h"
// This example uses PIO to erase, program and read back a SPI serial flash
// memory.
// ----------------------------------------------------------------------------
// Generic serial flash code
#define FLASH_PAGE_SIZE 256
#define FLASH_SECTOR_SIZE 4096
#define FLASH_CMD_PAGE_PROGRAM 0x02
#define FLASH_CMD_READ 0x03
#define FLASH_CMD_STATUS 0x05
#define FLASH_CMD_WRITE_EN 0x06
#define FLASH_CMD_SECTOR_ERASE 0x20
#define FLASH_STATUS_BUSY_MASK 0x01
// --- SPI ---
#ifndef PICO_DEFAULT_SPI
#define PICO_DEFAULT_SPI 0
#endif
#ifndef PICO_DEFAULT_SPI_SCK_PIN
#define PICO_DEFAULT_SPI_SCK_PIN 18
#endif
#ifndef PICO_DEFAULT_SPI_TX_PIN
#define PICO_DEFAULT_SPI_TX_PIN 19
#endif
#ifndef PICO_DEFAULT_SPI_RX_PIN
#define PICO_DEFAULT_SPI_RX_PIN 16
#endif
#ifndef PICO_DEFAULT_SPI_CSN_PIN
#define PICO_DEFAULT_SPI_CSN_PIN 17
#endif
void flash_read(const pio_spi_inst_t *spi, uint32_t addr, uint8_t *buf, size_t len) {
uint8_t cmd[4] = {
FLASH_CMD_READ,
addr >> 16,
addr >> 8,
addr
};
gpio_put(spi->cs_pin, 0);
pio_spi_write8_blocking(spi, cmd, 4);
pio_spi_read8_blocking(spi, buf, len);
gpio_put(spi->cs_pin, 1);
}
void flash_write_enable(const pio_spi_inst_t *spi) {
uint8_t cmd = FLASH_CMD_WRITE_EN;
gpio_put(spi->cs_pin, 0);
pio_spi_write8_blocking(spi, &cmd, 1);
gpio_put(spi->cs_pin, 1);
}
void flash_wait_done(const pio_spi_inst_t *spi) {
uint8_t status;
do {
gpio_put(spi->cs_pin, 0);
uint8_t cmd = FLASH_CMD_STATUS;
pio_spi_write8_blocking(spi, &cmd, 1);
pio_spi_read8_blocking(spi, &status, 1);
gpio_put(spi->cs_pin, 1);
} while (status & FLASH_STATUS_BUSY_MASK);
}
void flash_sector_erase(const pio_spi_inst_t *spi, uint32_t addr) {
uint8_t cmd[4] = {
FLASH_CMD_SECTOR_ERASE,
addr >> 16,
addr >> 8,
addr
};
flash_write_enable(spi);
gpio_put(spi->cs_pin, 0);
pio_spi_write8_blocking(spi, cmd, 4);
gpio_put(spi->cs_pin, 1);
flash_wait_done(spi);
}
void flash_page_program(const pio_spi_inst_t *spi, uint32_t addr, uint8_t data[]) {
flash_write_enable(spi);
uint8_t cmd[4] = {
FLASH_CMD_PAGE_PROGRAM,
addr >> 16,
addr >> 8,
addr
};
gpio_put(spi->cs_pin, 0);
pio_spi_write8_blocking(spi, cmd, 4);
pio_spi_write8_blocking(spi, data, FLASH_PAGE_SIZE);
gpio_put(spi->cs_pin, 1);
flash_wait_done(spi);
}
// ----------------------------------------------------------------------------
// Example program
void printbuf(const uint8_t buf[FLASH_PAGE_SIZE]) {
for (int i = 0; i < FLASH_PAGE_SIZE; ++i)
printf("%02x%c", buf[i], i % 16 == 15 ? '\n' : ' ');
}
int main() {
stdio_init_all();
#if !defined(PICO_DEFAULT_SPI_SCK_PIN) || !defined(PICO_DEFAULT_SPI_TX_PIN) || !defined(PICO_DEFAULT_SPI_RX_PIN) || !defined(PICO_DEFAULT_SPI_CSN_PIN)
#warning pio/spi/spi_flash example requires a board with SPI pins
puts("Default SPI pins were not defined");
#else
puts("PIO SPI Example");
pio_spi_inst_t spi = {
.pio = pio0,
.sm = 0,
.cs_pin = PICO_DEFAULT_SPI_CSN_PIN
};
gpio_init(PICO_DEFAULT_SPI_CSN_PIN);
gpio_put(PICO_DEFAULT_SPI_CSN_PIN, 1);
gpio_set_dir(PICO_DEFAULT_SPI_CSN_PIN, GPIO_OUT);
uint offset = pio_add_program(spi.pio, &spi_cpha0_program);
printf("Loaded program at %d\n", offset);
pio_spi_init(spi.pio, spi.sm, offset,
8, // 8 bits per SPI frame
31.25f, // 1 MHz @ 125 clk_sys
false, // CPHA = 0
false, // CPOL = 0
PICO_DEFAULT_SPI_SCK_PIN,
PICO_DEFAULT_SPI_TX_PIN,
PICO_DEFAULT_SPI_RX_PIN
);
// Make the 'SPI' pins available to picotool
bi_decl(bi_4pins_with_names(PICO_DEFAULT_SPI_RX_PIN, "SPI RX", PICO_DEFAULT_SPI_TX_PIN, "SPI TX", PICO_DEFAULT_SPI_SCK_PIN, "SPI SCK", PICO_DEFAULT_SPI_CSN_PIN, "SPI CS"));
uint8_t page_buf[FLASH_PAGE_SIZE];
const uint32_t target_addr = 0;
flash_sector_erase(&spi, target_addr);
flash_read(&spi, target_addr, page_buf, FLASH_PAGE_SIZE);
puts("After erase:");
printbuf(page_buf);
for (int i = 0; i < FLASH_PAGE_SIZE; ++i)
page_buf[i] = i;
flash_page_program(&spi, target_addr, page_buf);
flash_read(&spi, target_addr, page_buf, FLASH_PAGE_SIZE);
puts("After program:");
printbuf(page_buf);
flash_sector_erase(&spi, target_addr);
flash_read(&spi, target_addr, page_buf, FLASH_PAGE_SIZE);
puts("Erase again:");
printbuf(page_buf);
return 0;
#endif
}
pio_spi.c
/**
* Copyright (c) 2020 Raspberry Pi (Trading) Ltd.
*
* SPDX-License-Identifier: BSD-3-Clause
*/
#include "pio_spi.h"
// Just 8 bit functions provided here. The PIO program supports any frame size
// 1...32, but the software to do the necessary FIFO shuffling is left as an
// exercise for the reader :)
//
// Likewise we only provide MSB-first here. To do LSB-first, you need to
// - Do shifts when reading from the FIFO, for general case n != 8, 16, 32
// - Do a narrow read at a one halfword or 3 byte offset for n == 16, 8
// in order to get the read data correctly justified.
void __time_critical_func(pio_spi_write8_blocking)(const pio_spi_inst_t *spi, const uint8_t *src, size_t len) {
size_t tx_remain = len, rx_remain = len;
// Do 8 bit accesses on FIFO, so that write data is byte-replicated. This
// gets us the left-justification for free (for MSB-first shift-out)
io_rw_8 *txfifo = (io_rw_8 *) &spi->pio->txf[spi->sm];
io_rw_8 *rxfifo = (io_rw_8 *) &spi->pio->rxf[spi->sm];
while (tx_remain || rx_remain) {
if (tx_remain && !pio_sm_is_tx_fifo_full(spi->pio, spi->sm)) {
*txfifo = *src++;
--tx_remain;
}
if (rx_remain && !pio_sm_is_rx_fifo_empty(spi->pio, spi->sm)) {
(void) *rxfifo;
--rx_remain;
}
}
}
void __time_critical_func(pio_spi_read8_blocking)(const pio_spi_inst_t *spi, uint8_t *dst, size_t len) {
size_t tx_remain = len, rx_remain = len;
io_rw_8 *txfifo = (io_rw_8 *) &spi->pio->txf[spi->sm];
io_rw_8 *rxfifo = (io_rw_8 *) &spi->pio->rxf[spi->sm];
while (tx_remain || rx_remain) {
if (tx_remain && !pio_sm_is_tx_fifo_full(spi->pio, spi->sm)) {
*txfifo = 0;
--tx_remain;
}
if (rx_remain && !pio_sm_is_rx_fifo_empty(spi->pio, spi->sm)) {
*dst++ = *rxfifo;
--rx_remain;
}
}
}
void __time_critical_func(pio_spi_write8_read8_blocking)(const pio_spi_inst_t *spi, uint8_t *src, uint8_t *dst,
size_t len) {
size_t tx_remain = len, rx_remain = len;
io_rw_8 *txfifo = (io_rw_8 *) &spi->pio->txf[spi->sm];
io_rw_8 *rxfifo = (io_rw_8 *) &spi->pio->rxf[spi->sm];
while (tx_remain || rx_remain) {
if (tx_remain && !pio_sm_is_tx_fifo_full(spi->pio, spi->sm)) {
*txfifo = *src++;
--tx_remain;
}
if (rx_remain && !pio_sm_is_rx_fifo_empty(spi->pio, spi->sm)) {
*dst++ = *rxfifo;
--rx_remain;
}
}
}
pio_spi.h
/**
* Copyright (c) 2020 Raspberry Pi (Trading) Ltd.
*
* SPDX-License-Identifier: BSD-3-Clause
*/
#ifndef _PIO_SPI_H
#define _PIO_SPI_H
#include "hardware/pio.h"
#include "spi.pio.h"
typedef struct pio_spi_inst {
PIO pio;
uint sm;
uint cs_pin;
} pio_spi_inst_t;
void pio_spi_write8_blocking(const pio_spi_inst_t *spi, const uint8_t *src, size_t len);
void pio_spi_read8_blocking(const pio_spi_inst_t *spi, uint8_t *dst, size_t len);
void pio_spi_write8_read8_blocking(const pio_spi_inst_t *spi, uint8_t *src, uint8_t *dst, size_t len);
#endif
spi.pio.h
// -------------------------------------------------- //
// This file is autogenerated by pioasm; do not edit! //
// -------------------------------------------------- //
#pragma once
#if !PICO_NO_HARDWARE
#include "hardware/pio.h"
#endif
// --------- //
// spi_cpha0 //
// --------- //
#define spi_cpha0_wrap_target 0
#define spi_cpha0_wrap 1
static const uint16_t spi_cpha0_program_instructions[] = {
// .wrap_target
0x6101, // 0: out pins, 1 side 0 [1]
0x5101, // 1: in pins, 1 side 1 [1]
// .wrap
};
#if !PICO_NO_HARDWARE
static const struct pio_program spi_cpha0_program = {
.instructions = spi_cpha0_program_instructions,
.length = 2,
.origin = -1,
};
static inline pio_sm_config spi_cpha0_program_get_default_config(uint offset) {
pio_sm_config c = pio_get_default_sm_config();
sm_config_set_wrap(&c, offset + spi_cpha0_wrap_target, offset + spi_cpha0_wrap);
sm_config_set_sideset(&c, 1, false, false);
return c;
}
#endif
// --------- //
// spi_cpha1 //
// --------- //
#define spi_cpha1_wrap_target 0
#define spi_cpha1_wrap 2
static const uint16_t spi_cpha1_program_instructions[] = {
// .wrap_target
0x6021, // 0: out x, 1 side 0
0xb101, // 1: mov pins, x side 1 [1]
0x4001, // 2: in pins, 1 side 0
// .wrap
};
#if !PICO_NO_HARDWARE
static const struct pio_program spi_cpha1_program = {
.instructions = spi_cpha1_program_instructions,
.length = 3,
.origin = -1,
};
static inline pio_sm_config spi_cpha1_program_get_default_config(uint offset) {
pio_sm_config c = pio_get_default_sm_config();
sm_config_set_wrap(&c, offset + spi_cpha1_wrap_target, offset + spi_cpha1_wrap);
sm_config_set_sideset(&c, 1, false, false);
return c;
}
#include "hardware/gpio.h"
static inline void pio_spi_init(PIO pio, uint sm, uint prog_offs, uint n_bits,
float clkdiv, bool cpha, bool cpol, uint pin_sck, uint pin_mosi, uint pin_miso) {
// 根据 CPHA 选择对应的 PIO 程序
pio_sm_config c = cpha ?
spi_cpha1_program_get_default_config(prog_offs) :
spi_cpha0_program_get_default_config(prog_offs);
// 配置 MOSI(输出)、MISO(输入)、SCK(side-set)
sm_config_set_out_pins(&c, pin_mosi, 1);
sm_config_set_in_pins(&c, pin_miso);
sm_config_set_sideset_pins(&c, pin_sck);
// 本示例仅支持 MSB-first(移位方向固定)
sm_config_set_out_shift(&c, false, true, n_bits);
sm_config_set_in_shift(&c, false, true, n_bits);
// 设置 SPI 时钟分频
sm_config_set_clkdiv(&c, clkdiv);
// 将 MOSI、SCK 输出初始化为低,MISO 设为输入
pio_sm_set_pins_with_mask(
pio, sm, 0,
(1u << pin_sck) | (1u << pin_mosi)
);
pio_sm_set_pindirs_with_mask(
pio, sm,
(1u << pin_sck) | (1u << pin_mosi),
(1u << pin_sck) | (1u << pin_mosi) | (1u << pin_miso)
);
pio_gpio_init(pio, pin_mosi);
pio_gpio_init(pio, pin_miso);
pio_gpio_init(pio, pin_sck);
// 通过 GPIO 输出反相实现 CPOL=1
gpio_set_outover(pin_sck, cpol ? GPIO_OVERRIDE_INVERT : GPIO_OVERRIDE_NORMAL);
// SPI 是同步接口,绕过输入同步器减少输入延迟
hw_set_bits(&pio->input_sync_bypass, 1u << pin_miso);
// 初始化并启动状态机
pio_sm_init(pio, sm, prog_offs, &c);
pio_sm_set_enabled(pio, sm, true);
}
#endif
// ------------ //
// spi_cpha0_cs //
// ------------ //
#define spi_cpha0_cs_wrap_target 0
#define spi_cpha0_cs_wrap 8
#define spi_cpha0_cs_offset_entry_point 8u
static const uint16_t spi_cpha0_cs_program_instructions[] = {
// .wrap_target
0x6101, // 0: out pins, 1 side 0 [1]
0x4801, // 1: in pins, 1 side 1
0x0840, // 2: jmp x--, 0 side 1
0x6001, // 3: out pins, 1 side 0
0xa022, // 4: mov x, y side 0
0x4801, // 5: in pins, 1 side 1
0x08e0, // 6: jmp !osre, 0 side 1
0xa142, // 7: nop side 0 [1]
0x91e0, // 8: pull ifempty block side 2 [1]
// .wrap
};
#if !PICO_NO_HARDWARE
static const struct pio_program spi_cpha0_cs_program = {
.instructions = spi_cpha0_cs_program_instructions,
.length = 9,
.origin = -1,
};
static inline pio_sm_config spi_cpha0_cs_program_get_default_config(uint offset) {
pio_sm_config c = pio_get_default_sm_config();
sm_config_set_wrap(&c, offset + spi_cpha0_cs_wrap_target, offset + spi_cpha0_cs_wrap);
sm_config_set_sideset(&c, 2, false, false);
return c;
}
#endif
// ------------ //
// spi_cpha1_cs //
// ------------ //
#define spi_cpha1_cs_wrap_target 0
#define spi_cpha1_cs_wrap 8
#define spi_cpha1_cs_offset_entry_point 7u
static const uint16_t spi_cpha1_cs_program_instructions[] = {
// .wrap_target
0x6901, // 0: out pins, 1 side 1 [1]
0x4001, // 1: in pins, 1 side 0
0x0040, // 2: jmp x--, 0 side 0
0x6801, // 3: out pins, 1 side 1
0xa822, // 4: mov x, y side 1
0x4001, // 5: in pins, 1 side 0
0x00e0, // 6: jmp !osre, 0 side 0
0x91e0, // 7: pull ifempty block side 2 [1]
0xa142, // 8: nop side 0 [1]
// .wrap
};
#if !PICO_NO_HARDWARE
static const struct pio_program spi_cpha1_cs_program = {
.instructions = spi_cpha1_cs_program_instructions,
.length = 9,
.origin = -1,
};
static inline pio_sm_config spi_cpha1_cs_program_get_default_config(uint offset) {
pio_sm_config c = pio_get_default_sm_config();
sm_config_set_wrap(&c, offset + spi_cpha1_cs_wrap_target, offset + spi_cpha1_cs_wrap);
sm_config_set_sideset(&c, 2, false, false);
return c;
}
#include "hardware/gpio.h"
static inline void pio_spi_cs_init(PIO pio, uint sm, uint prog_offs, uint n_bits,
float clkdiv, bool cpha, bool cpol,
uint pin_sck, uint pin_mosi, uint pin_miso) {
// 根据 CPHA 选择对应 PIO 程序
pio_sm_config c = cpha ?
spi_cpha1_cs_program_get_default_config(prog_offs) :
spi_cpha0_cs_program_get_default_config(prog_offs);
sm_config_set_out_pins(&c, pin_mosi, 1);
sm_config_set_in_pins(&c, pin_miso);
sm_config_set_sideset_pins(&c, pin_sck);
sm_config_set_out_shift(&c, false, true, n_bits);
sm_config_set_in_shift(&c, false, true, n_bits);
sm_config_set_clkdiv(&c, clkdiv);
// 设置 SCK(2bit),MOSI 输出
pio_sm_set_pins_with_mask(
pio, sm, (2u << pin_sck),
(3u << pin_sck) | (1u << pin_mosi)
);
pio_sm_set_pindirs_with_mask(
pio, sm,
(3u << pin_sck) | (1u << pin_mosi),
(3u << pin_sck) | (1u << pin_mosi) | (1u << pin_miso)
);
pio_gpio_init(pio, pin_mosi);
pio_gpio_init(pio, pin_miso);
pio_gpio_init(pio, pin_sck);
pio_gpio_init(pio, pin_sck + 1); // 片选 CSn
gpio_set_outover(pin_sck, cpol ? GPIO_OVERRIDE_INVERT : GPIO_OVERRIDE_NORMAL);
hw_set_bits(&pio->input_sync_bypass, 1u << pin_miso);
uint entry_point =
prog_offs +
(cpha ? spi_cpha1_cs_offset_entry_point : spi_cpha0_cs_offset_entry_point);
pio_sm_init(pio, sm, entry_point, &c);
pio_sm_exec(pio, sm, pio_encode_set(pio_x, n_bits - 2));
pio_sm_exec(pio, sm, pio_encode_set(pio_y, n_bits - 2));
pio_sm_set_enabled(pio, sm, true);
}
#endif