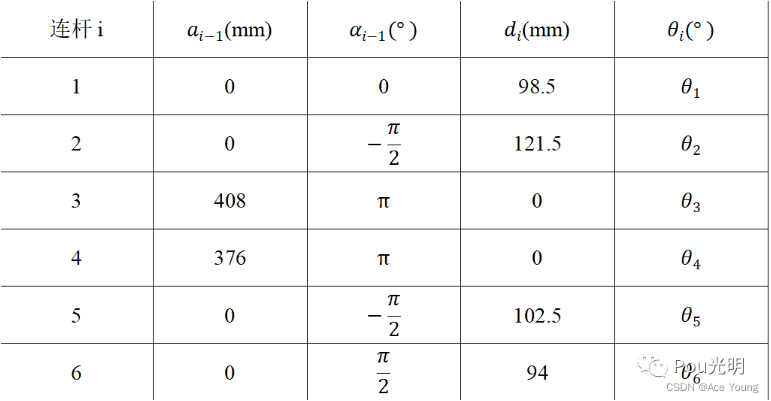
机械臂DH参数包含连杆长度aia_iai、连杆扭角αi\alpha_iαi、关节距离did_idi、关节转角θi\theta_iθi四个核心参数,口诀多结合参数的核心定义、关联坐标轴和运动特点来编,好记又能对应核心含义,以下是几组实用口诀及对应解析,方便理解记忆:
Crig DH参数又称改进型DH参数
Standard DH参数又称传统DH参数
- 核心含义速记口诀
- 口诀:a距α角定连杆,d偏θ转控关节
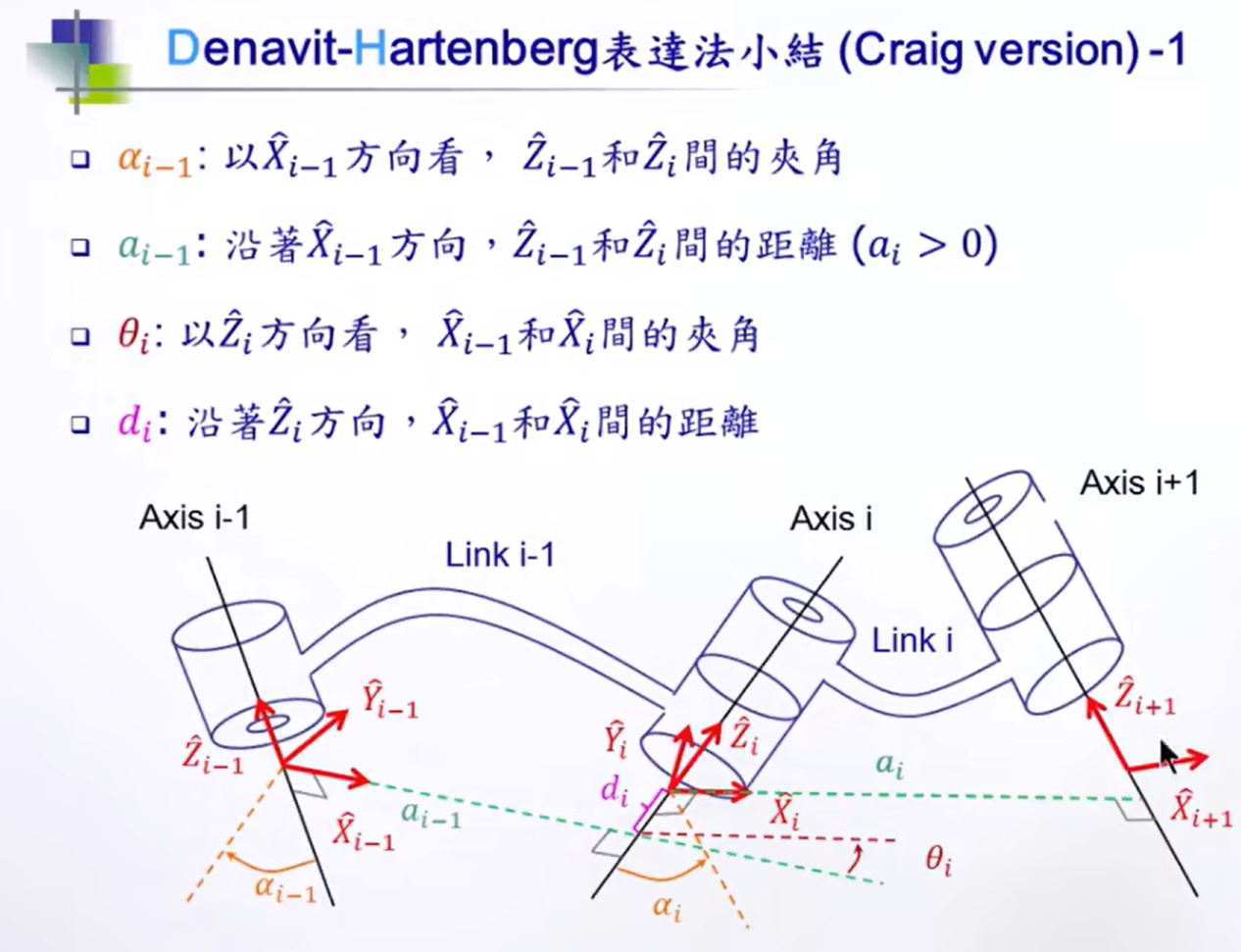
- 解析:前半句对应描述连杆固有属性的两个参数,aaa是相邻两关节轴的最短距离(连杆长度),α\alphaα是这两根关节轴的空间夹角(连杆扭角);后半句对应和关节运动相关的两个参数,(d)是沿关节轴的偏移距离,θ\thetaθ是绕关节轴的旋转角度,二者分别对应移动关节和转动关节的核心变量。
- 坐标轴关联口诀
- 口诀:x轴定aα,z轴管dθ
- 解析:该口诀适配参数的坐标系定义规则,能快速对应参数与基准轴的关系。其中aaa是沿x轴方向两关节轴公垂线的长度,α\alphaα是绕x轴旋转使相邻z轴平行的角度;ddd是沿z轴方向的平移距离,θ\thetaθ是绕z轴旋转使相邻x轴平行的角度,精准匹配参数的基准坐标轴。
- 场景化动作口诀
- 口诀:θ转d移定位置,a伸α扭固形状
- 解析:把参数对应成机械臂的动作,更易联想。θ\thetaθ的旋转动作和ddd的平移动作,决定了相邻连杆的相对位置,转动关节靠θ\thetaθ变、移动关节靠ddd变;aaa像连杆伸出的长度,α\alphaα像连杆扭转的角度,这两个参数是机械臂的固有结构参数,决定了连杆的基本形状,不会随关节运动改变。
- 细节补充口诀
- 口诀:a非负,α定角,d移θ转分关节
- 解析:补充参数的关键细节特性。aaa作为连杆长度,始终是非负值;α\alphaα是固定的两轴夹角,按右手定则判断正负;而ddd和θ\thetaθ要根据关节类型区分变量属性,移动关节中ddd是变量,转动关节中θ\thetaθ是变量,其余情况下为固定值。
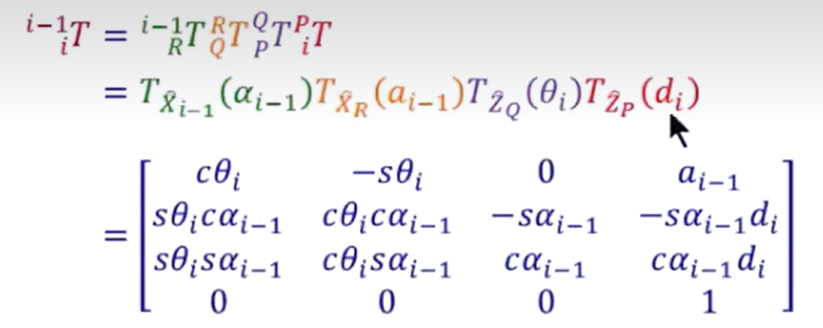
- 下图为改进型DH参数(Craig DH)定义方式
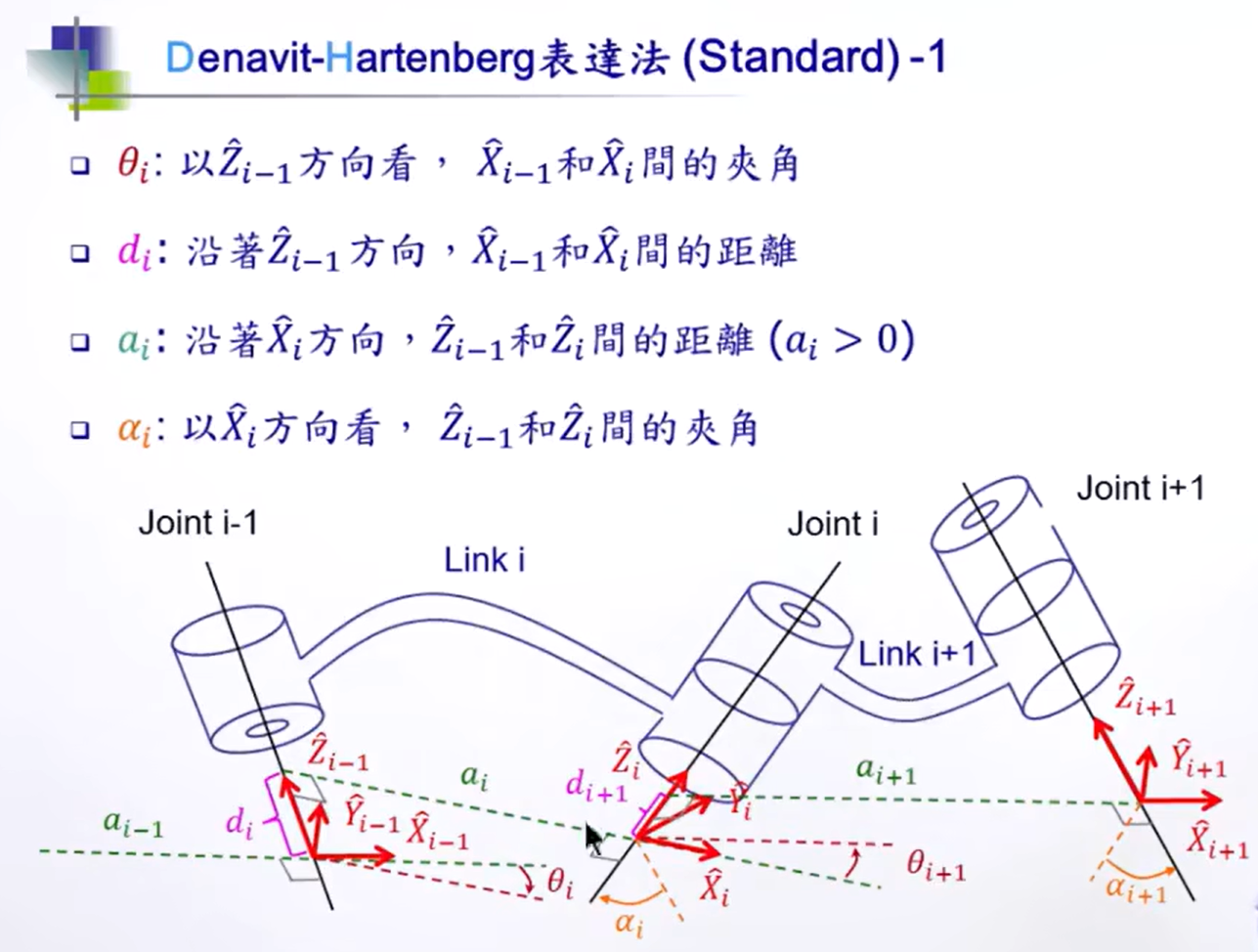
下图为传统DH参数定义方式
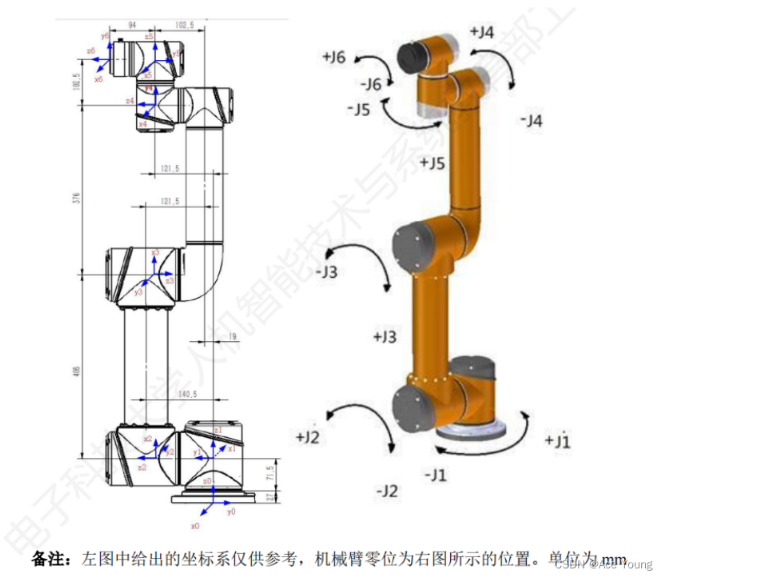
下图为Aubo I5机械臂为例,定义改进型DH参数时,各关节坐标系的位置示意图。