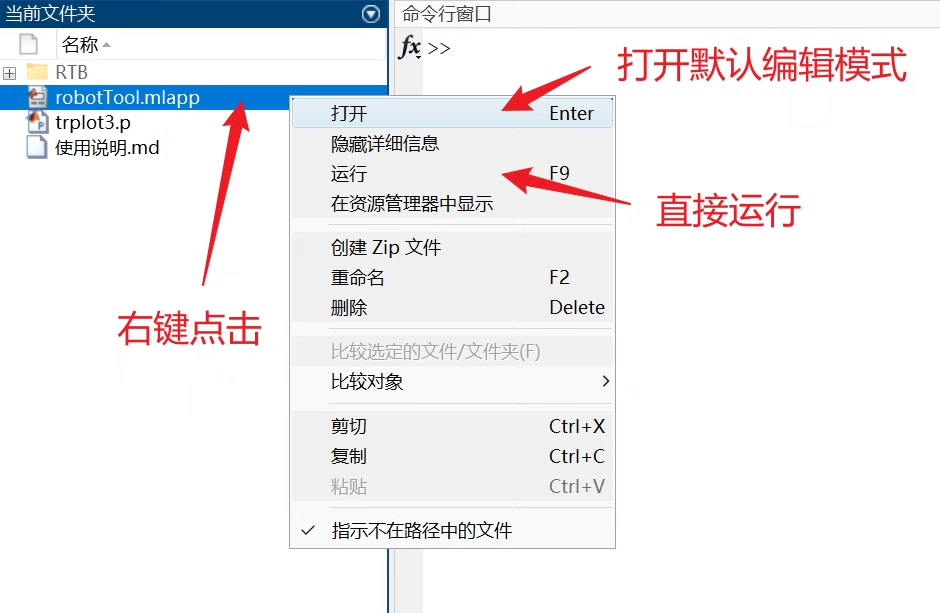
Matlab机器人工具箱,欧拉角RPY角位姿变换。 机器人技术基础,位姿变换演示小基于Matlab开发,可编辑。 p代码版本不可编辑与查看代码,只可使用。 源代码版本可以任意编辑 两个版本的功能完全相同。 带操作使用说明。 涉及机器人学相关的数学知识与matlab编程知识
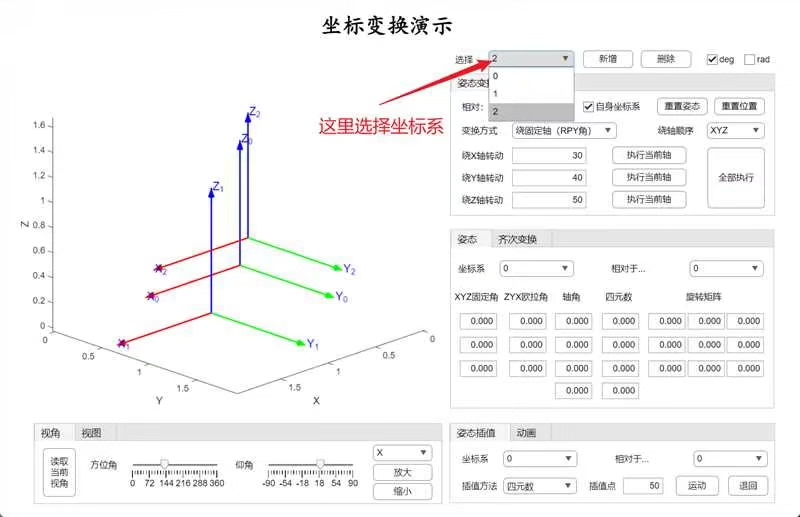
最近在搞机器人位姿变换实验,发现Matlab机器人工具箱真是个宝藏。特别是用欧拉角(Roll-Pitch-Yaw)实现姿态转换这块,比手写矩阵方便多了。今天就带大家玩点实在的------用工具箱实现坐标系变换,顺便拆解几个关键代码片段。
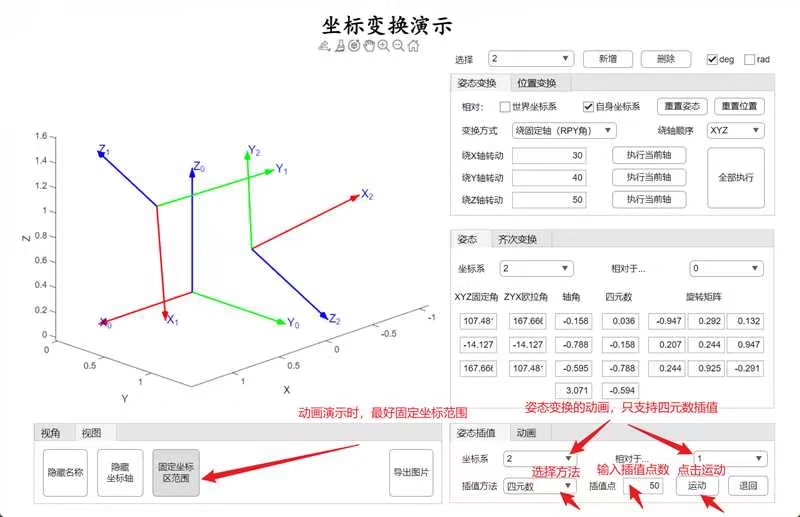
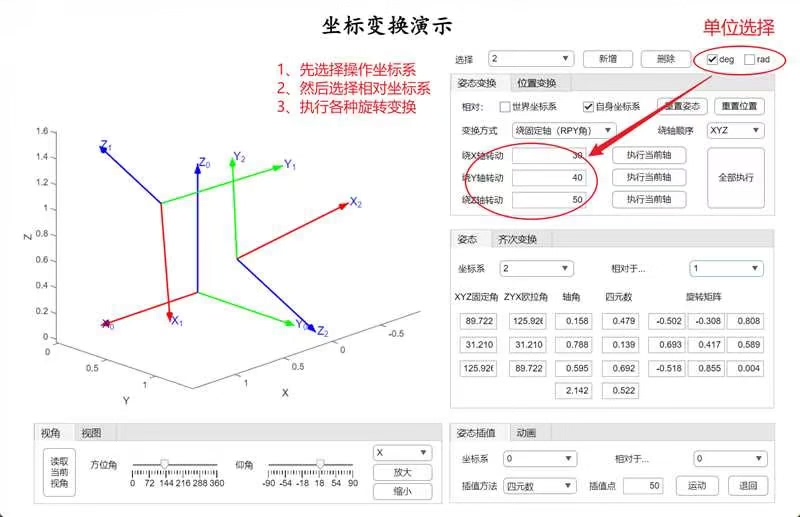
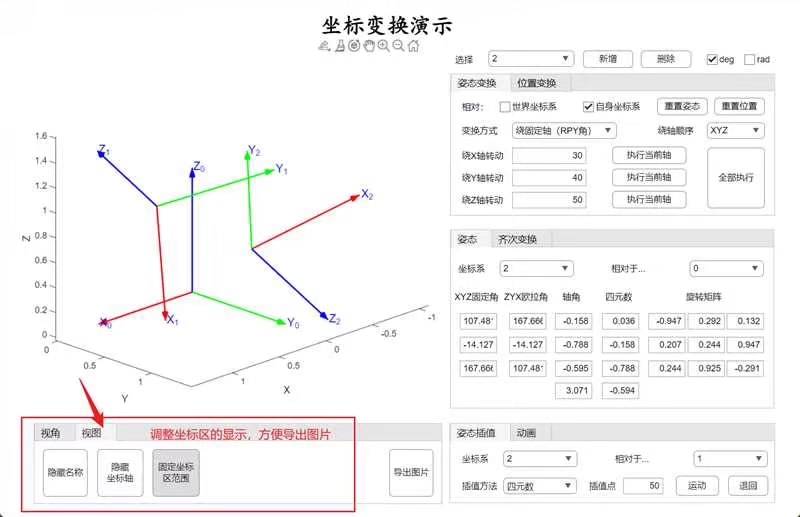
先来点硬核的数学姿势(别慌,就两行公式):三维空间中的旋转矩阵R可以拆解成绕Z-Y-X轴顺序旋转的组合,也就是R = Rz(ψ) Ry(θ) Rx(φ)。这三个角度就是我们常说的横滚角(Roll)、俯仰角(Pitch)、偏航角(Yaw)。
上代码!先初始化工具箱环境:
matlab
% 创建机械臂模型
L1 = Link('d', 0, 'a', 0.5, 'alpha', 0);
L2 = Link('d', 0, 'a', 0.3, 'alpha', pi/2);
robot = SerialLink([L1 L2], 'name', '我的机械臂');这里用SerialLink类快速搭建了一个两连杆机械臂。Link函数的'a'参数代表连杆长度,'alpha'是扭转角。注意第二个关节的alpha设为π/2,这会让第二个连杆在初始状态垂直向上。
重点来了,欧拉角转旋转矩阵的操作:
matlab
% 输入RPY角度(单位:弧度)
roll = deg2rad(30);
pitch = deg2rad(45);
yaw = deg2rad(60);
% 生成旋转矩阵
R = rotz(yaw) * roty(pitch) * rotx(roll);
disp('生成的旋转矩阵:')
disp(R)rotz,roty,rotx这三个函数直接对应绕各轴旋转的变换矩阵。运行后会输出一个3x3的矩阵,这时候可以拿手算结果对比验证------相信我,这个校验步骤能帮你省掉后面80%的调试时间。
想看实际运动效果?试试正运动学计算:
matlab
% 设置关节角
q = [pi/6, pi/4];
% 计算末端位姿
T = robot.fkine(q);
disp('末端齐次变换矩阵:')
disp(T.T)fkine方法直接输出齐次变换矩阵,其中就包含我们刚才生成的旋转矩阵。这时候旋转矩阵的第三列会显示z轴方向,可以用来检查机械臂是否按预期姿态运动。
操作说明划重点:
- 运行
robot.teach()进入交互界面,拖动滑块实时看运动效果 - 双击关节参数可输入精确数值
- 按住Shift+鼠标右键调整观察视角
- 在命令行输入
robot.plot3d()开启三维渲染模式
遇到问题别急着摔键盘,先检查这些:
- 角度单位是不是混用了弧度/度(工具箱默认用弧度)
- 旋转顺序是否正确(Z-Y-X还是其他顺序)
- 齐次矩阵维度是否为4x4
最后给个防踩坑提示:如果看到姿态矩阵出现类似1e-16这种极小值,别慌,这只是计算时的浮点误差,用round(R, 10)四舍五入处理即可。工具箱的p代码版本虽然不能看源码,但用methods(robot)命令还是能查看到所有可用方法------这招在摸索对象功能时特别管用。
下次可以试试在旋转后叠加平移变换,组合出更复杂的位姿操作。记住,所有酷炫的机器人动作,本质上都是这些基础变换的排列组合而已。