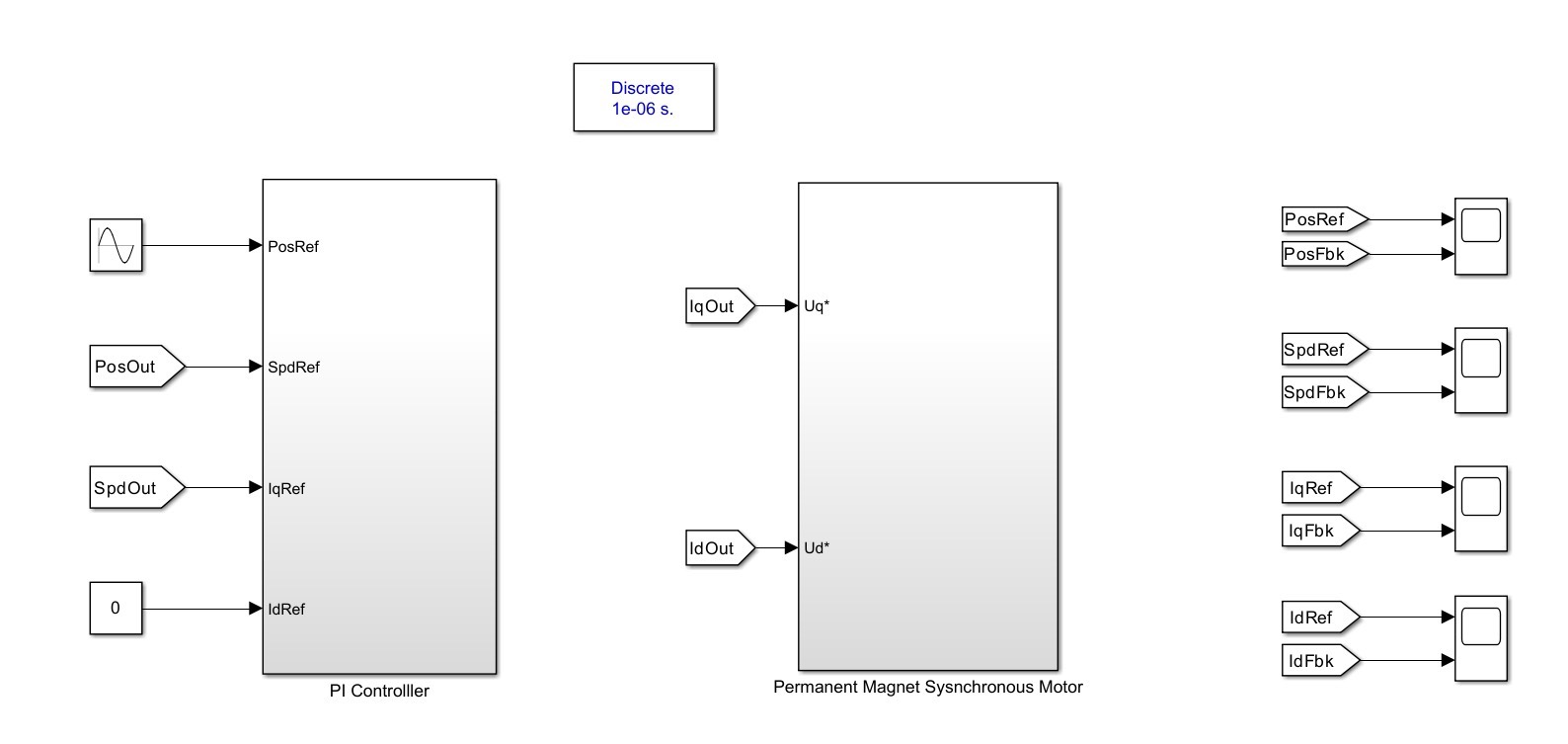
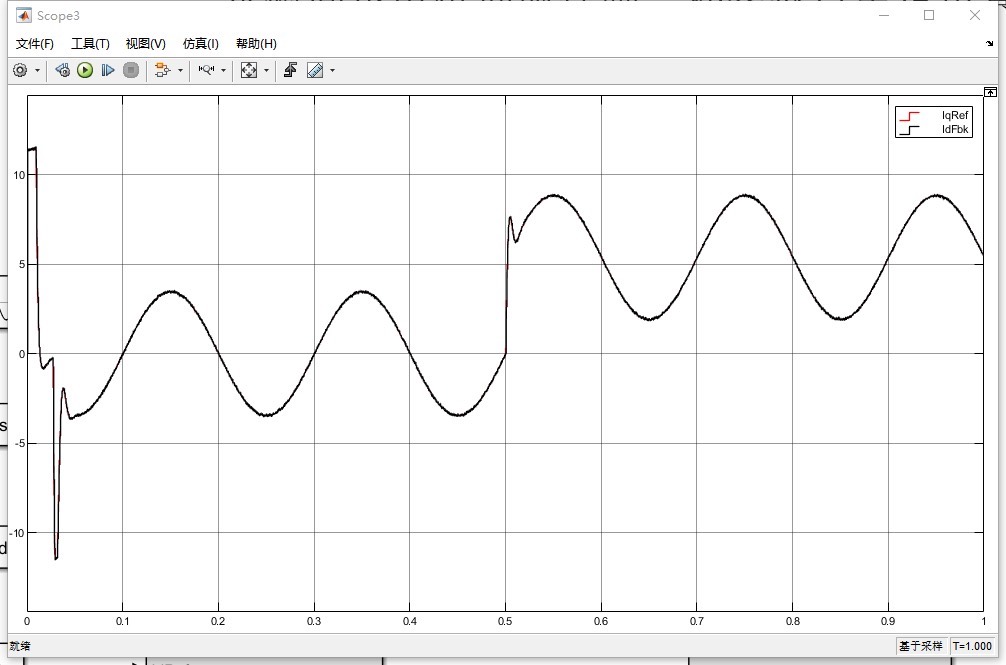
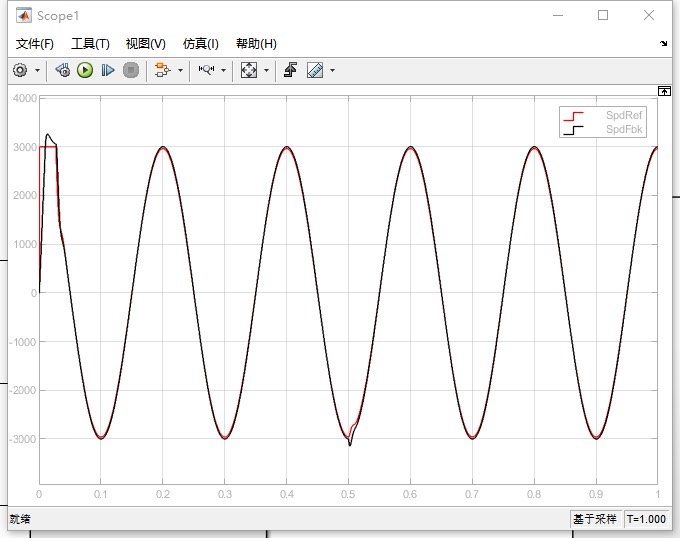
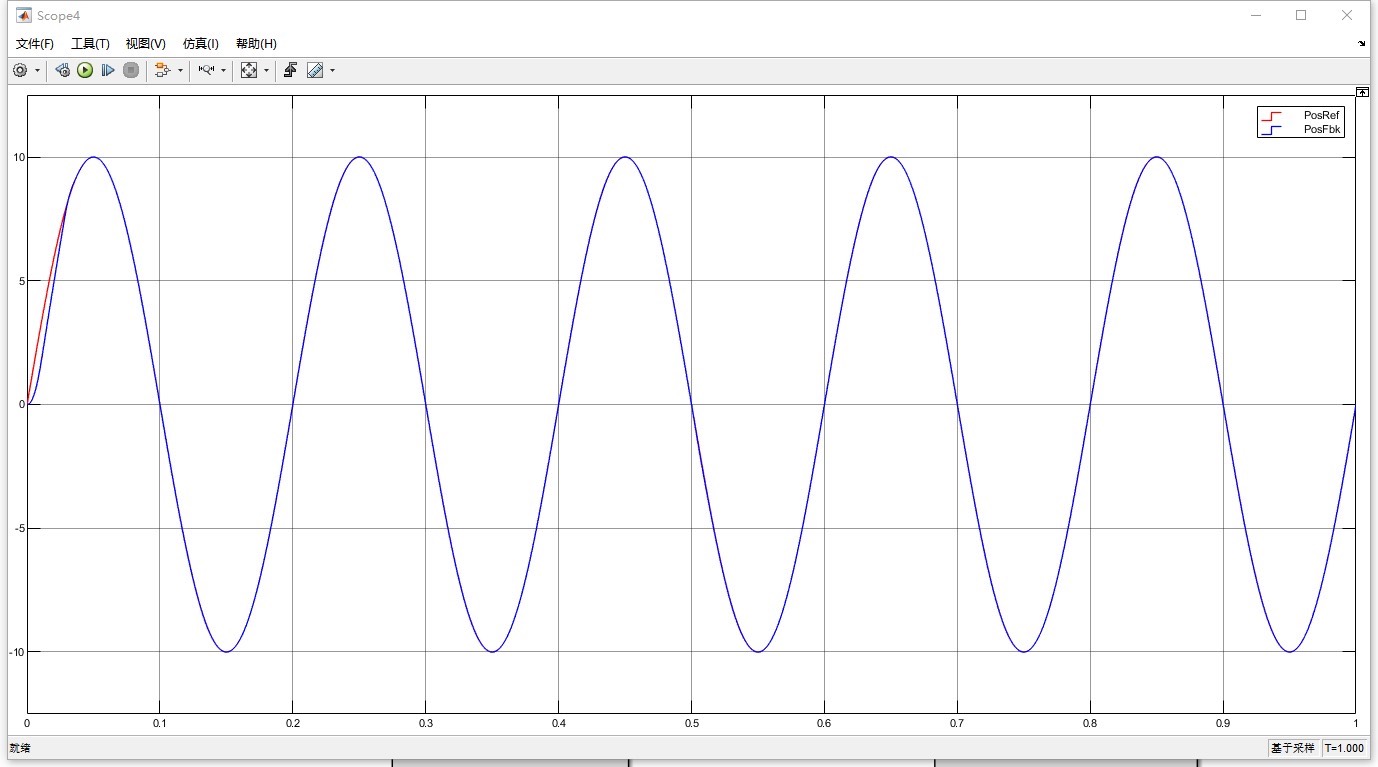
永磁同步电机伺服控制仿真三环PI参数自整定 Matlab仿真模型 1.模型简介 模型为永磁同步电机伺服控制仿真,支持 Matlab 各个版本。 模型内主要包含DC直流电压源、三相逆变器、永磁同步电机、采样模块、SVPWM、Clark、Park、Ipark、位置环、速度环、电流环等模块,其中,SVPWM、Clark、Park、Ipark模块采用Matlab funtion编写,其与C语言编程较为接近,容易进行实物移植。 模型均采用离散化仿真,其效果更接近实际数字控制系统。 2.算法简介 伺服控制由位置环、速度环、电流环三环结构构成,其中,电流环采用PI控制,并具有电流环解耦功能;转速环采用抗积分饱和PI控制;位置环采用P+前馈的复合控制,能够更好地跟踪指令信号。 本仿真中最大的亮点是三环PI参数自整定,只需输入正确的电机参数(电阻、电感、转动惯量等参数),无需手动调节PI参数,能够节省调试时间。 3.仿真效果 在 0.5s 加负载,查看位置、转速和转路电流响应。 ① 位置响应波形,如下图 3 所示。 ② 转速响应波形,如下图 4 所示。 ③ 转矩电流响应波形,如下图 5 所示。 4. 可提供模型内相关算法的参考文献,避免大量阅读文献浪费时间。 可针对模型内的相关技术问题进行,并给出指导意见。 【注】 模型已搭建完毕,原则上不会做任何修改。
在工业自动化领域,永磁同步电机(PMSM)以其高效率、高精度的特点,成为伺服控制系统中的重要元件。今天,我们将深入探讨一个基于Matlab的永磁同步电机伺服控制仿真模型,该模型不仅支持三环PID控制,更值得一提的是,它实现了PI参数的自整定功能,极大简化了调试过程。
模型概览:一个功能强大的仿真平台
这个模型集成了多种功能模块,从电源、逆变器到电机本体,再到各种控制算法模块,为用户提供了从信号输入到系统响应的完整仿真环境。
模型的亮点之一在于其模块化设计:
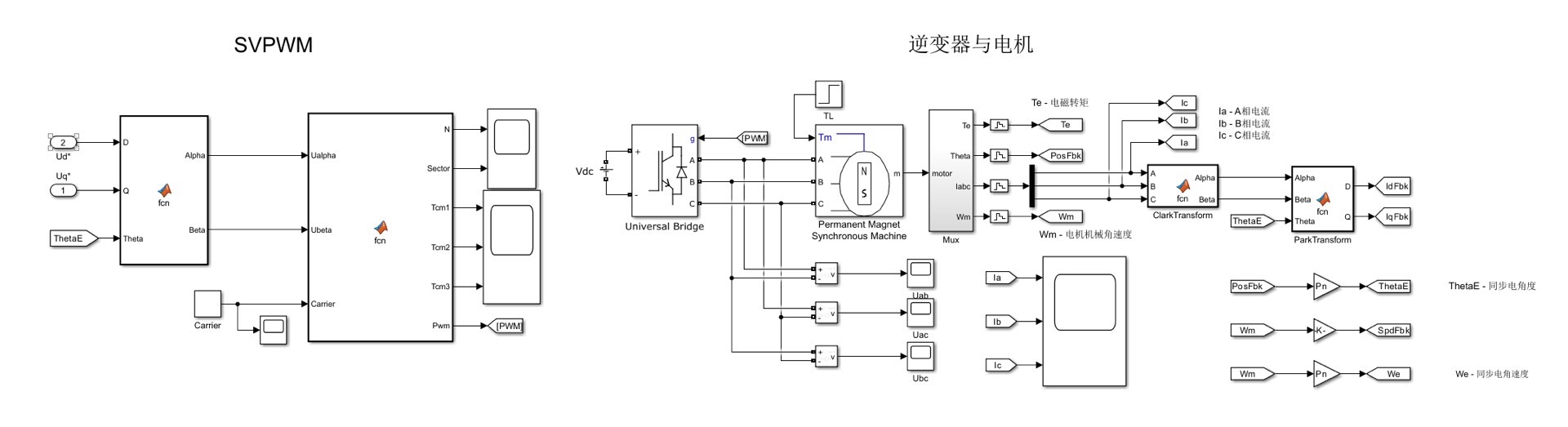
- 电源模块:采用DC直流电压源,为整个系统提供稳定的供电。
- 逆变器模块:使用三相逆变器,将直流电转换为交流电,驱动永磁同步电机运行。
- 控制核心:包含Clark变换、Park变换等关键算法模块,实现坐标系转换,为控制算法提供正确的输入信号。
- 反馈系统:采样模块实时采集电机运行状态,确保控制系统能够快速响应。
特别值得一提的是,模型中的SVPWM、Clark、Park及反变换模块均采用Matlab Function编写,这种方式不仅能够提高仿真的效率,而且由于编程方式接近C语言,非常便于实际移植到嵌入式控制系统中。
核心算法:三环控制与自整定PI调节
伺服控制的核心是三环控制系统:位置环、速度环、电流环。各个环之间通过反馈机制相互作用,确保系统能够精确跟踪给定的指令信号。
电流环控制
电流环负责调节电机的定子电流,确保其跟踪给定的参考值。在模型中,电流环采用了经典的PI控制算法,其控制律可以表示为:
matlab
function dCurrent_Control
% 电流环PI控制
error = reference - feedback;
integral = integral + error;
output = Kp * error + Ki * integral;
end为了提高系统的动态性能,模型还引入了电流解耦功能,这意味着即使在电机运行状态发生变化时,系统仍能保持良好的控制效果。
速度环控制
速度环位于控制层次的中间层,负责调节电机的速度,使其跟踪给定的转速指令。为了防止积分饱和现象,模型采用了抗积分饱和PI控制策略:
matlab
function vSpeed_Control
% 速度环抗积分饱和PI控制
error = reference - feedback;
integral = anti_integral_saturation(error);
output = Kp * error + Ki * integral;
end通过这种设计,即使在系统发生较大偏差时,积分项也不会迅速饱和,从而保持系统的稳定性和响应速度。
位置环控制
位于最外层的位置环负责调节电机的位置,使其准确跟踪给定的参考轨迹。模型采用了一种P+前馈的复合控制策略,这种策略能够在保证系统稳定性的同时,显著提高系统的动态响应速度:
matlab
function Position_Control
% 位置环P + 前馈控制
error = reference - feedback;
output = Kp * error + feedforward;
end模型的最大的亮点在于其三环PI参数的自整定功能。传统的伺服控制系统中,PI参数的整定往往需要大量的实验和调试工作。而在这个模型中,用户只需输入电机的基本参数(如电阻、电感、转动惯量等),系统就能自动计算出各个环的最佳PI参数值,极大地简化了调试过程,提高了系统的易用性。
仿真效果:直观验证系统性能
为了验证模型的性能,我们进行了负载突变工况下的仿真试验。在仿真过程中,我们在0.5秒处给系统施加一个负载突变,观察系统的位置、速度和转矩电流的响应情况。
位置响应
位置响应波形展示了系统在负载突变时的位置跟踪能力。从波形中可以清晰地看到,系统在突变发生时,位置出现了轻微的波动,但很快恢复了稳定,继续精确跟踪给定的参考轨迹。这表明系统具有良好的鲁棒性和动态响应能力。
速度响应
速度响应波形反映了系统在速度调节方面的性能。负载突变导致系统速度出现了瞬时下降,但在控制算法的作用下,速度迅速恢复并趋于稳定。这一过程展示了系统在速度控制方面的高效性和稳定性。
转矩电流响应
转矩电流的响应波形则直观地展示了系统的动态调节能力。在负载突变发生时,转矩电流迅速增加,以克服负载突变带来的影响,随后逐渐恢复到正常水平。这表明系统的电流调节环能够快速响应负载变化,确保系统稳定运行。
通过对这些波形的分析,我们可以全面评估系统的性能,为实际应用提供有力的支持。
结语
这个永磁同步电机伺服控制仿真模型不仅为用户提供了一个直观的仿真平台,更通过其独特的PI参数自整定功能,大大简化了调试过程,节省了大量时间和精力。无论是用于教学、科研还是实际系统开发,这个模型都表现出了极高的实用价值。
如果你对伺服控制系统感兴趣,或正在寻找一个高效、可靠的仿真工具,那么这个模型无疑是一个值得深入研究和借鉴的对象。希望这篇博文能为你提供有价值的参考和启发。