西门子S7-200PLC和组态王自动化搬运机械手的组态系统
在自动化控制领域,西门子S7 - 200PLC与组态王相结合来打造自动化搬运机械手的组态系统,是实现高效生产流程的关键一步。今天咱就唠唠这其中的门道。
西门子S7 - 200PLC基础
西门子S7 - 200PLC作为一款经典的可编程逻辑控制器,它就像自动化系统的"大脑",负责处理各种逻辑指令。比如说,我们来看看它的基本指令编写,以实现简单的电机启停控制为例:
ladderlogic
Network 1
// 启动按钮常开触点
LD I0.0
// 电机线圈
= Q0.0
// 停止按钮常闭触点
A I0.1 在这段代码里,LD I0.0表示装载输入点I0.0的状态,这里I0.0连接的是启动按钮,当按钮按下,该点为高电平。= Q0.0就是将输出线圈Q0.0置位,Q0.0连接的是电机,也就实现了电机启动。A I0.1则是与操作,I0.1连接停止按钮,常态下为高电平,按下停止按钮,I0.1为低电平,电机停止运行。这就是PLC最基础的逻辑控制。
自动化搬运机械手的控制需求
自动化搬运机械手需要完成物料的抓取、搬运和放置等一系列动作。这就要求PLC能精准控制机械手各个关节的运动,像伸缩、旋转、升降等。比如说,我们设定机械手在A点抓取物料,然后移动到B点放下。
ladderlogic
// 机械手移动到A点
Network 2
LD M0.0
S Q0.1, 1
// 抓取物料
Network 3
LD I0.2
S Q0.2, 1
// 移动到B点
Network 4
LD M0.1
S Q0.3, 1
// 放下物料
Network 5
LD I0.3
R Q0.2, 1 在上面代码中,M0.0和M0.1是中间继电器,用来触发不同的动作流程。当满足M0.0条件,置位Q0.1,控制机械手移动到A点。I0.2检测到物料到位,置位Q0.2实现抓取。同理,M0.1触发移动到B点,I0.3检测到位置到达,复位Q0.2放下物料。
组态王与S7 - 200PLC的连接
组态王是一款优秀的人机界面(HMI)软件,它能将PLC的控制数据以直观的画面展示给操作人员,同时接收操作人员的指令反馈给PLC。要实现两者连接,首先得在组态王里设置设备驱动。
- 打开组态王工程浏览器,在"设备"下选择"COM1"(根据实际连接端口选择)。
- 双击"新建",弹出"设备配置向导",选择"PLC" - "西门子" - "S7200系列" - "PPI"。
- 按照提示一步步设置设备地址、通信波特率等参数,这些参数要与PLC的实际设置一致。
连接成功后,就可以在组态王里创建变量与PLC的寄存器进行关联。比如创建一个"机械手状态"变量,关联PLC的某个输出点,这样就能在组态王画面上实时显示机械手的运行状态了。
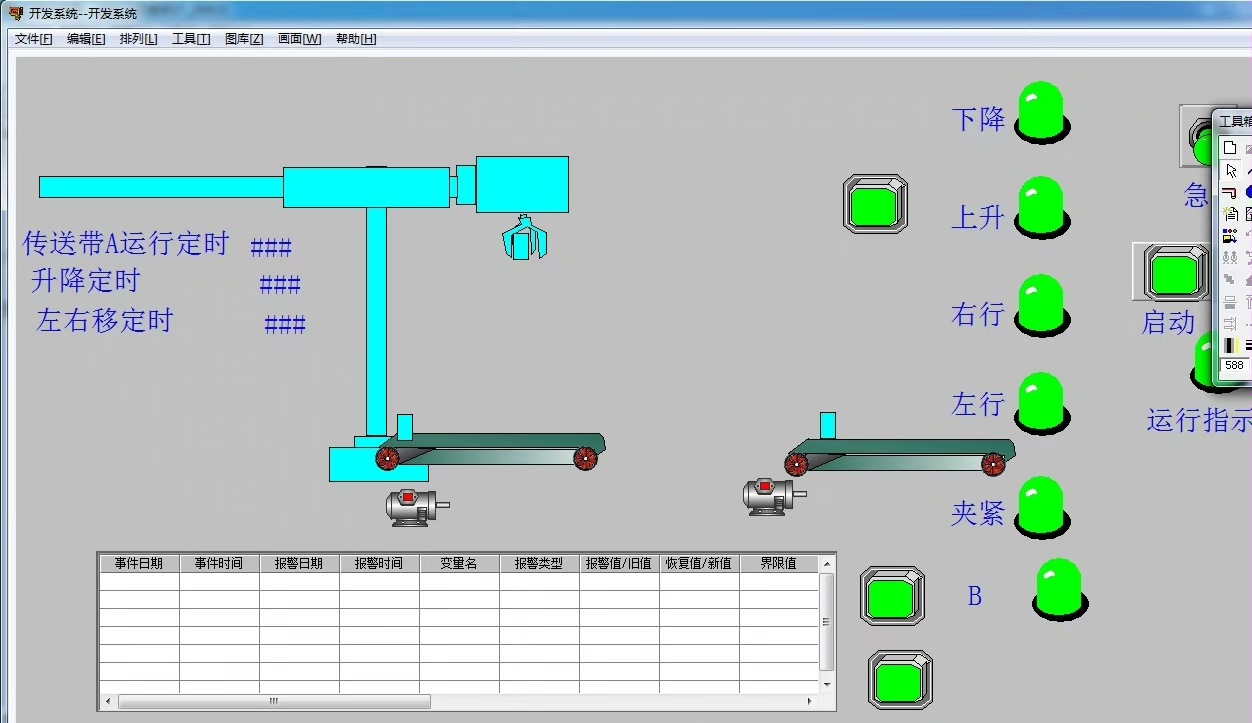
组态王画面设计
在组态王里设计一个直观的自动化搬运机械手监控画面。画一个机械手的图形,然后通过动画连接来模拟它的实际动作。
比如,对于机械手的伸缩动作,选中代表机械手伸缩部分的图形,右键选择"动画连接" - "缩放连接"。在弹出窗口中,设置表达式关联PLC中控制伸缩的变量,设定缩放比例和方向,这样当PLC中变量状态改变,图形就会模拟出伸缩动作。
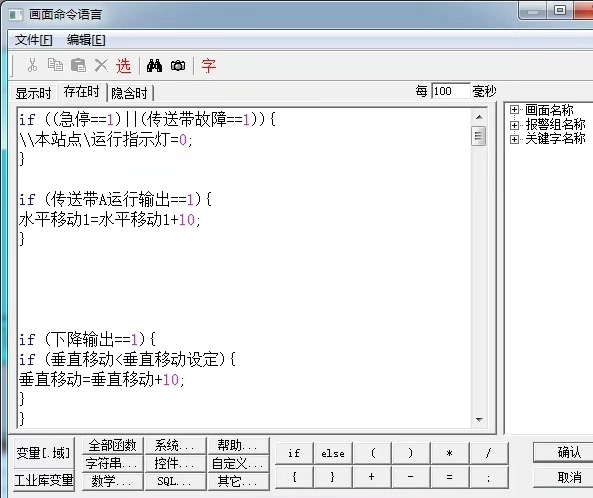
再创建一些按钮,比如"启动""停止"按钮,通过命令语言连接到PLC对应的输入点,实现远程操作机械手。
c
// "启动"按钮命令语言
if(本站点.启动按钮 == 1)
{
// 向PLC发送启动信号
SetValue(1, "PLC变量名");
}这样,一个基于西门子S7 - 200PLC和组态王的自动化搬运机械手组态系统就初步搭建起来了。它将PLC强大的逻辑控制能力与组态王友好的人机交互界面相结合,为自动化生产提供了高效、可靠的解决方案。无论是工业生产还是自动化实验场景,都有着广泛的应用前景。