
pico-sdk-api文档
rp2040-datasheet.pdf
getting-started-with-pico.pdf
树莓派 Pico 之可编程 IO(PIO)
CMakeLists.txt
cmake_minimum_required(VERSION 3.13)
include(pico_sdk_import.cmake)
project(pio_squarewave C CXX ASM)
pico_sdk_init()
add_executable(pio_squarewave
main.c
pio_i2c.c
iic.pio
)
pico_generate_pio_header(pio_squarewave ${CMAKE_CURRENT_LIST_DIR}/iic.pio)
target_link_libraries(pio_squarewave pico_stdlib hardware_pio)
pico_add_extra_outputs(pio_squarewave)
iic.pio
;
; 版权 (c) 2020 Raspberry Pi (Trading) Ltd.
;
; SPDX-License-Identifier: BSD-3-Clause
;
.program i2c
.side_set 1 opt pindirs
;===============================
; TX FIFO 数据格式(16 bit)
;===============================
; | 15:10 | 9 | 8:1 | 0 |
; | Instr | Final | Data | NAK |
;
; Instr > 0 :表示此 FIFO 项为"指令计数",无数据字节,
; 接下来的 Instr + 1 个 FIFO 项将被解析为指令序列。
;
; Instr = 0 :表示此 FIFO 项为"数据字节",需移出 Data[7:0] 并处理 ACK。
;
; Final = 1 :表示这是本次传输的最后一个字节,若收到 NAK 不会中断。
; Final = 0 :收到 NAK 则触发 IRQ 并暂停 SM。
;
; 自动拉取(autopull)需启用,阈值 16 bit。
; 自动推送(autopush)需启用,阈值 8 bit。
; 主机应使用半字(16bit)写入 TX FIFO,使 OSR 立即获得数据。
;
;===============================
; 引脚映射关系
;===============================
; SDA = 输入引脚 0, 输出 0, set pin 0, jmp pin
; SCL = 输入引脚 1 (用于 clock stretching)
; side-set 引脚 0 = SCL
; OUT 输出引脚 0 = SDA
;
; 等待(wait pin)要求:SCL 必须为 SDA + 1
;
; 注意:系统层需将 OE(输出使能)反相!
; 因 I²C 总线要求:OE=0 时驱动低电平,OE=1 时释放为上拉。
;
do_nack:
jmp y-- entry_point ; 若 y>0 表示允许 NAK,则继续执行
irq wait 0 rel ; 否则立即触发 IRQ,请求上层软件处理
;===============================
; 发送/接收一个完整字节(8bit + ACK)
;===============================
do_byte:
set x, 7 ; X = 7,表示需要循环 8 次(8 bit)
bitloop:
out pindirs, 1 [7] ; 输出数据位(若是读操作则为全1表示释放)
nop side 1 [2] ; SCL 拉高(上升沿)
wait 1 pin, 1 [4] ; 等待从机(支持 clock stretching)
in pins, 1 [7] ; 在 SCL 高电平中间采样 SDA
jmp x-- bitloop side 0 [7] ; SCL 拉低(下降沿),继续下一位
;===============
; 处理 ACK/NAK
;===============
out pindirs, 1 [7] ; 读操作时,此处发送 ACK
nop side 1 [7] ; SCL 拉高
wait 1 pin, 1 [7] ; 允许从机拉住 SCL(时钟延展)
jmp pin do_nack side 0 [2] ; 若 SDA 高=NAK → 跳转 do_nack,否则继续
;=========================================
; 主执行入口
;=========================================
public entry_point:
.wrap_target
out x, 6 ; 从 OSR 取出 Instr(高 6 bits)
out y, 1 ; 取出 Final 位(是否忽略 NAK)
jmp !x do_byte ; 若 Instr = 0 → 处理数据字节
out null, 32 ; Instr > 0 时,丢弃 OSR 其余数据位
do_exec:
out exec, 16 ; 执行 1 条指令(从 FIFO 获取)
jmp x-- do_exec ; 循环 Instr + 1 次
.wrap
% c-sdk {
#include "hardware/clocks.h"
#include "hardware/gpio.h"
//=======================================================
// 初始化 PIO I²C 状态机
// 参数:
// pio - PIO 控制器
// sm - 状态机编号
// offset - 程序偏移地址
// pin_sda - SDA 引脚
// pin_scl - SCL 引脚(必须是 SDA+1)
//=======================================================
static inline void i2c_program_init(PIO pio, uint sm, uint offset, uint pin_sda, uint pin_scl) {
assert(pin_scl == pin_sda + 1);
pio_sm_config c = i2c_program_get_default_config(offset);
// 配置 IO 功能:OUT/SET/IN/SIDESET/JMP PIN
sm_config_set_out_pins(&c, pin_sda, 1);
sm_config_set_set_pins(&c, pin_sda, 1);
sm_config_set_in_pins(&c, pin_sda);
sm_config_set_sideset_pins(&c, pin_scl);
sm_config_set_jmp_pin(&c, pin_sda);
// 配置移位寄存器
sm_config_set_out_shift(&c, false, true, 16); // 自动拉取 16bit
sm_config_set_in_shift(&c, false, true, 8); // 自动推送 8bit
// 设置 I²C 时钟:系统时钟 / (32 * 100kHz)
float div = (float)clock_get_hz(clk_sys) / (32 * 100000);
sm_config_set_clkdiv(&c, div);
//----------------------------------------
// 启动前避免"毛刺"影响 I²C 总线
//----------------------------------------
gpio_pull_up(pin_scl);
gpio_pull_up(pin_sda);
uint32_t both_pins = (1u << pin_sda) | (1u << pin_scl);
pio_sm_set_pins_with_mask(pio, sm, both_pins, both_pins);
pio_sm_set_pindirs_with_mask(pio, sm, both_pins, both_pins);
pio_gpio_init(pio, pin_sda);
gpio_set_oeover(pin_sda, GPIO_OVERRIDE_INVERT); // 反向 OE 以符合 I²C 开漏性质
pio_gpio_init(pio, pin_scl);
gpio_set_oeover(pin_scl, GPIO_OVERRIDE_INVERT);
pio_sm_set_pins_with_mask(pio, sm, 0, both_pins);
//----------------------------------------
// 清除 IRQ 防止错误触发系统中断
//----------------------------------------
pio_set_irq0_source_enabled(pio, (enum pio_interrupt_source)((uint) pis_interrupt0 + sm), false);
pio_set_irq1_source_enabled(pio, (enum pio_interrupt_source)((uint) pis_interrupt0 + sm), false);
pio_interrupt_clear(pio, sm);
//----------------------------------------
// 初始化并启动 PIO 状态机
//----------------------------------------
pio_sm_init(pio, sm, offset + i2c_offset_entry_point, &c);
pio_sm_set_enabled(pio, sm, true);
}
%}
.program set_scl_sda
.side_set 1 opt
;=======================================================
; 简单的 GPIO 控制指令表,用于生成 I²C 的
; START、STOP、RESTART 等序列。
; 本程序不作为独立程序运行,只作为指令模板。
;=======================================================
set pindirs, 0 side 0 [7] ; SCL=0, SDA=0
set pindirs, 1 side 0 [7] ; SCL=0, SDA=1
set pindirs, 0 side 1 [7] ; SCL=1, SDA=0
set pindirs, 1 side 1 [7] ; SCL=1, SDA=1
% c-sdk {
// 指令表索引定义
enum {
I2C_SC0_SD0 = 0,
I2C_SC0_SD1,
I2C_SC1_SD0,
I2C_SC1_SD1
};
%}
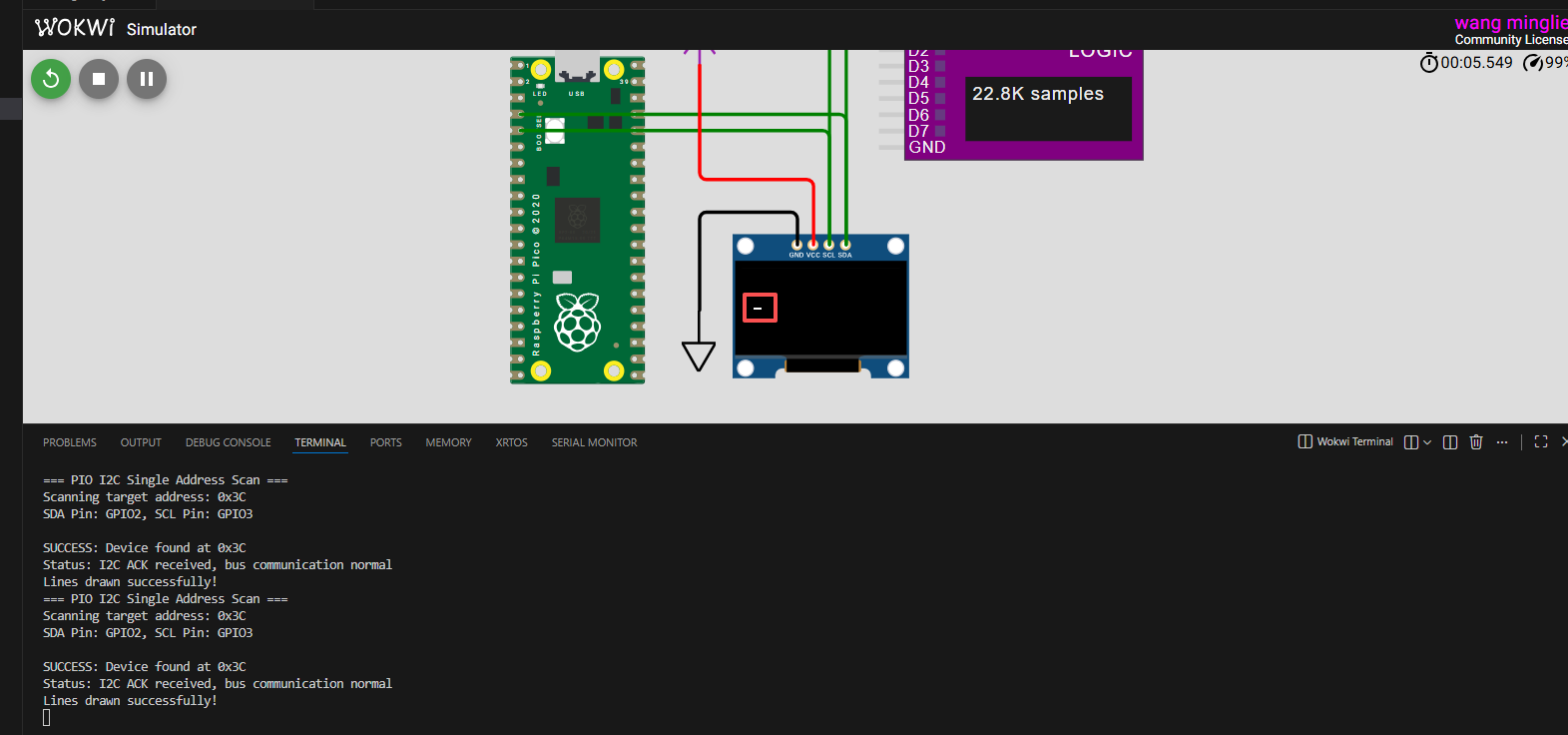
diagram.json
{
"version": 1,
"author": "wang minglie",
"editor": "wokwi",
"parts": [
{
"type": "wokwi-pi-pico",
"id": "pico",
"top": -3.15,
"left": 3.6,
"attrs": { "builder": "pico-sdk" }
},
{ "type": "wokwi-logic-analyzer", "id": "logic1", "top": -28.45, "left": 220.8, "attrs": {} },
{
"type": "board-ssd1306",
"id": "oled1",
"top": 108.74,
"left": 134.63,
"attrs": { "i2cAddress": "0x3c" }
},
{ "type": "wokwi-vcc", "id": "vcc1", "top": -18.44, "left": 105.6, "attrs": {} },
{ "type": "wokwi-gnd", "id": "gnd1", "top": 153.6, "left": 105, "attrs": {} }
],
"connections": [
[ "pico:GP0", "$serialMonitor:RX", "", [] ],
[ "pico:GP1", "$serialMonitor:TX", "", [] ],
[ "oled1:SDA", "pico:GP2", "green", [ "v0" ] ],
[ "oled1:SCL", "pico:GP3", "green", [ "v0" ] ],
[ "logic1:D0", "oled1:SDA", "green", [ "h0" ] ],
[ "logic1:D1", "oled1:SCL", "green", [ "h0" ] ],
[ "gnd1:GND", "oled1:GND", "black", [ "v-57.6", "h-9.6" ] ],
[ "oled1:VCC", "vcc1:VCC", "red", [ "v-38.4", "h-67.05" ] ]
],
"dependencies": {}
}
wokwi.toml
[wokwi]
version = 1
firmware = "cmake-build-debug-pico/pio_squarewave.uf2"
elf = "cmake-build-debug-pico/pio_squarewave.elf"
main.c
#include <stdio.h>
#include "pico/stdlib.h"
#include "pio_i2c.h"
#include <string.h>
#define PIN_SDA 2
#define PIN_SCL 3
// 假设已初始化 PIO I2C(pio0, sm0),以下是初始化指令序列
#define SSD3306_ADDR 0x3C
#define CMD_MODE 0x00 // 指令模式控制字节
#define DATA_MODE 0x40 // 数据模式控制字节
// SSD3306 屏幕参数(128x64 像素)
#define SCREEN_WIDTH 128
#define SCREEN_HEIGHT 64
#define PAGE_COUNT 8 // 64行 / 8行 per page = 8页
// 发送单字节指令
void ssd3306_send_cmd(uint8_t cmd) {
uint sm = 0;
uint8_t data[] = {CMD_MODE, cmd};
pio_i2c_write_blocking(pio0, sm, SSD3306_ADDR, data, sizeof(data));
}
// 发送带参数的指令
void ssd3306_send_cmd_with_param(uint8_t cmd, uint8_t param) {
uint sm = 0;
uint8_t data[] = {CMD_MODE, cmd, param};
pio_i2c_write_blocking(pio0, sm, SSD3306_ADDR, data, sizeof(data));
}
// 发送带2个参数的指令(如设置地址范围)
void ssd3306_send_cmd_with_2params(uint8_t cmd, uint8_t param1, uint8_t param2) {
uint sm = 0;
uint8_t data[] = {CMD_MODE, cmd, param1, param2};
pio_i2c_write_blocking(pio0, sm, SSD3306_ADDR, data, sizeof(data));
}
// 初始化函数
void ssd3306_init() {
ssd3306_send_cmd(0xAE); // 关闭显示
ssd3306_send_cmd_with_param(0xA8, 0x3F); // 多路复用比=64(128x64 屏)
ssd3306_send_cmd_with_param(0xD3, 0x00); // 显示偏移=0
ssd3306_send_cmd(0x40); // 显示起始行=0
ssd3306_send_cmd_with_param(0xA1, 0x00); // 段重映射=正常(0xA1 可改为 0xA0 翻转)
ssd3306_send_cmd_with_param(0xDA, 0x12); // COM 引脚配置=0x12(128x64 屏)
ssd3306_send_cmd_with_param(0x81, 0x7F); // 对比度=默认 0x7F(可调整 0x00~0xFF)
ssd3306_send_cmd_with_param(0xA4, 0x00); // 正常显示(非全亮)
ssd3306_send_cmd_with_param(0xA6, 0x00); // 正常极性(非反显)
ssd3306_send_cmd_with_param(0xD5, 0x80); // 时钟分频=默认
ssd3306_send_cmd_with_param(0xD9, 0x22); // 预充电周期=0x22(3.3V 供电)
ssd3306_send_cmd_with_param(0xDB, 0x20); // VCOM 电压=0.77V
ssd3306_send_cmd_with_param(0xAD, 0x8A); // 开启内置 DC-DC 转换器
ssd3306_send_cmd_with_param(0x20, 0x02); // 显存寻址模式=页寻址(默认)
ssd3306_send_cmd(0xAF); // 开启显示
}
// 清屏(填充全黑)
void ssd3306_clear() {
uint sm = 0;
// 设置地址范围:全屏幕(列0~127,页0~7)
ssd3306_send_cmd_with_2params(0x21, 0x00, SCREEN_WIDTH - 1); // 列地址范围
ssd3306_send_cmd_with_2params(0x22, 0x00, PAGE_COUNT - 1); // 页地址范围
// 填充 128*8=1024 字节的 0x00(全黑)
uint8_t clear_buf[SCREEN_WIDTH + 1]; // 控制字节 + 128个数据字节
clear_buf[0] = DATA_MODE; // 数据模式控制字节
memset(&clear_buf[1], 0x00, SCREEN_WIDTH); // 数据部分填充0
for (int page = 0; page < PAGE_COUNT; page++) {
pio_i2c_write_blocking(pio0, sm, SSD3306_ADDR, clear_buf, sizeof(clear_buf));
}
}
/**
* 画水平线
* @param x1: 起始X坐标(0~127)
* @param x2: 结束X坐标(0~127,需 ≥x1)
* @param y: Y坐标(0~63)
*/
void ssd3306_draw_hline(uint8_t x1, uint8_t x2, uint8_t y) {
if (x1 > x2 || y >= SCREEN_HEIGHT) return;
// 计算当前Y坐标所在的页(page = y / 8)和页内偏移(bit = y % 8)
uint8_t page = y / 8;
uint8_t bit = y % 8;
uint8_t pixel_data = 1 << bit; // 该Y坐标对应的像素位(1=点亮,0=熄灭)
// 设置地址范围:列x1~x2,页page~page(仅操作当前页)
ssd3306_send_cmd_with_2params(0x21, x1, x2); // 列范围
ssd3306_send_cmd_with_2params(0x22, page, page); // 页范围
// 构造数据:控制字节 + (x2-x1+1)个像素数据
uint8_t data_len = x2 - x1 + 1;
uint8_t *line_buf = malloc(data_len + 1); // 动态分配缓冲区
if (!line_buf) return;
line_buf[0] = DATA_MODE; // 数据模式控制字节
for (int i = 0; i < data_len; i++) {
line_buf[i + 1] = pixel_data; // 每个X坐标都点亮对应Y位
}
// 写入显存
pio_i2c_write_blocking(pio0, 0, SSD3306_ADDR, line_buf, data_len + 1);
free(line_buf); // 释放缓冲区
}
/**
* 画垂直线
* @param x: X坐标(0~127)
* @param y1: 起始Y坐标(0~63)
* @param y2: 结束Y坐标(0~63,需 ≥y1)
*/
void ssd3306_draw_vline(uint8_t x, uint8_t y1, uint8_t y2) {
if (x >= SCREEN_WIDTH || y1 > y2) return;
// 遍历Y1到Y2对应的所有页
for (uint8_t y = y1; y <= y2; y++) {
uint8_t page = y / 8;
uint8_t bit = y % 8;
uint8_t pixel_data = 1 << bit;
// 设置地址:列x~x,页page~page(仅操作当前X和页)
ssd3306_send_cmd_with_2params(0x21, x, x);
ssd3306_send_cmd_with_2params(0x22, page, page);
// 写入单个像素数据
uint8_t data[] = {DATA_MODE, pixel_data};
pio_i2c_write_blocking(pio0, 0, SSD3306_ADDR, data, sizeof(data));
}
}
int main() {
// 初始化串口和PIO I2C
stdio_init_all();
sleep_ms(2000); // Wait for UART connection (USB serial enumeration)
PIO pio = pio0;
uint sm = 0;
uint offset = pio_add_program(pio, &i2c_program);
i2c_program_init(pio, sm, offset, PIN_SDA, PIN_SCL);
// 仅扫描 0x3C 地址
printf("=== PIO I2C Single Address Scan ===\n");
printf("Scanning target address: 0x%02X\n", SSD3306_ADDR);
printf("SDA Pin: GPIO%d, SCL Pin: GPIO%d\n\n", PIN_SDA, PIN_SCL);
// 检测 0x3C 地址(跳过保留地址判断,直接检测)
int result = pio_i2c_read_blocking(pio, sm, SSD3306_ADDR, NULL, 0);
// 输出检测结果(纯英文,无汉字)
if (result >= 0) {
printf("SUCCESS: Device found at 0x%02X\n", SSD3306_ADDR);
printf("Status: I2C ACK received, bus communication normal\n");
ssd3306_init(); // 初始化SSD3306
ssd3306_clear(); // 清屏(避免乱码)
// 画2条示例线
ssd3306_draw_hline(10, 15, 32); // 水平线:X1=10, X2=15, Y=32(屏幕中间的小短线)
printf("Lines drawn successfully!\n");
} else {
printf("FAILED: No device found at 0x%02X\n", SSD3306_ADDR);
printf("Possible reasons:\n");
printf(" 1. Device not powered on\n");
printf(" 2. Wrong wiring (SDA/SCL reversed?)\n");
printf(" 3. Missing 4.7K-10K pull-up resistors on SDA/SCL\n");
printf(" 4. Device actual address is not 0x%02X (e.g., 0x3D)\n", SSD3306_ADDR);
printf(" 5. GPIO pin definition mismatch with wiring\n");
}
// 循环保持程序运行
while (true) {
sleep_ms(1000);
}
return 0;
}
pio_i2c.c
/**
* Copyright (c) 2021 Raspberry Pi (Trading) Ltd.
*
* SPDX-License-Identifier: BSD-3-Clause
*/
#include "pio_i2c.h"
const int PIO_I2C_ICOUNT_LSB = 10;
const int PIO_I2C_FINAL_LSB = 9;
const int PIO_I2C_DATA_LSB = 1;
const int PIO_I2C_NAK_LSB = 0;
bool pio_i2c_check_error(PIO pio, uint sm) {
return pio_interrupt_get(pio, sm);
}
void pio_i2c_resume_after_error(PIO pio, uint sm) {
pio_sm_drain_tx_fifo(pio, sm);
pio_sm_exec(pio, sm, (pio->sm[sm].execctrl & PIO_SM0_EXECCTRL_WRAP_BOTTOM_BITS) >> PIO_SM0_EXECCTRL_WRAP_BOTTOM_LSB);
pio_interrupt_clear(pio, sm);
}
void pio_i2c_rx_enable(PIO pio, uint sm, bool en) {
if (en)
hw_set_bits(&pio->sm[sm].shiftctrl, PIO_SM0_SHIFTCTRL_AUTOPUSH_BITS);
else
hw_clear_bits(&pio->sm[sm].shiftctrl, PIO_SM0_SHIFTCTRL_AUTOPUSH_BITS);
}
static inline void pio_i2c_put16(PIO pio, uint sm, uint16_t data) {
while (pio_sm_is_tx_fifo_full(pio, sm))
;
// some versions of GCC dislike this
#ifdef __GNUC__
#pragma GCC diagnostic push
#pragma GCC diagnostic ignored "-Wstrict-aliasing"
#endif
*(io_rw_16 *)&pio->txf[sm] = data;
#ifdef __GNUC__
#pragma GCC diagnostic pop
#endif
}
// If I2C is ok, block and push data. Otherwise fall straight through.
void pio_i2c_put_or_err(PIO pio, uint sm, uint16_t data) {
while (pio_sm_is_tx_fifo_full(pio, sm))
if (pio_i2c_check_error(pio, sm))
return;
if (pio_i2c_check_error(pio, sm))
return;
// some versions of GCC dislike this
#ifdef __GNUC__
#pragma GCC diagnostic push
#pragma GCC diagnostic ignored "-Wstrict-aliasing"
#endif
*(io_rw_16 *)&pio->txf[sm] = data;
#ifdef __GNUC__
#pragma GCC diagnostic pop
#endif
}
uint8_t pio_i2c_get(PIO pio, uint sm) {
return (uint8_t)pio_sm_get(pio, sm);
}
void pio_i2c_start(PIO pio, uint sm) {
pio_i2c_put_or_err(pio, sm, 1u << PIO_I2C_ICOUNT_LSB); // Escape code for 2 instruction sequence
pio_i2c_put_or_err(pio, sm, set_scl_sda_program_instructions[I2C_SC1_SD0]); // We are already in idle state, just pull SDA low
pio_i2c_put_or_err(pio, sm, set_scl_sda_program_instructions[I2C_SC0_SD0]); // Also pull clock low so we can present data
}
void pio_i2c_stop(PIO pio, uint sm) {
pio_i2c_put_or_err(pio, sm, 2u << PIO_I2C_ICOUNT_LSB);
pio_i2c_put_or_err(pio, sm, set_scl_sda_program_instructions[I2C_SC0_SD0]); // SDA is unknown; pull it down
pio_i2c_put_or_err(pio, sm, set_scl_sda_program_instructions[I2C_SC1_SD0]); // Release clock
pio_i2c_put_or_err(pio, sm, set_scl_sda_program_instructions[I2C_SC1_SD1]); // Release SDA to return to idle state
};
void pio_i2c_repstart(PIO pio, uint sm) {
pio_i2c_put_or_err(pio, sm, 3u << PIO_I2C_ICOUNT_LSB);
pio_i2c_put_or_err(pio, sm, set_scl_sda_program_instructions[I2C_SC0_SD1]);
pio_i2c_put_or_err(pio, sm, set_scl_sda_program_instructions[I2C_SC1_SD1]);
pio_i2c_put_or_err(pio, sm, set_scl_sda_program_instructions[I2C_SC1_SD0]);
pio_i2c_put_or_err(pio, sm, set_scl_sda_program_instructions[I2C_SC0_SD0]);
}
static void pio_i2c_wait_idle(PIO pio, uint sm) {
// Finished when TX runs dry or SM hits an IRQ
pio->fdebug = 1u << (PIO_FDEBUG_TXSTALL_LSB + sm);
while (!(pio->fdebug & 1u << (PIO_FDEBUG_TXSTALL_LSB + sm) || pio_i2c_check_error(pio, sm)))
tight_loop_contents();
}
int pio_i2c_write_blocking(PIO pio, uint sm, uint8_t addr, uint8_t *txbuf, uint len) {
int err = 0;
pio_i2c_start(pio, sm);
pio_i2c_rx_enable(pio, sm, false);
pio_i2c_put16(pio, sm, (addr << 2) | 1u);
while (len && !pio_i2c_check_error(pio, sm)) {
if (!pio_sm_is_tx_fifo_full(pio, sm)) {
--len;
pio_i2c_put_or_err(pio, sm, (*txbuf++ << PIO_I2C_DATA_LSB) | ((len == 0) << PIO_I2C_FINAL_LSB) | 1u);
}
}
pio_i2c_stop(pio, sm);
pio_i2c_wait_idle(pio, sm);
if (pio_i2c_check_error(pio, sm)) {
err = -1;
pio_i2c_resume_after_error(pio, sm);
pio_i2c_stop(pio, sm);
}
return err;
}
int pio_i2c_read_blocking(PIO pio, uint sm, uint8_t addr, uint8_t *rxbuf, uint len) {
int err = 0;
pio_i2c_start(pio, sm);
pio_i2c_rx_enable(pio, sm, true);
while (!pio_sm_is_rx_fifo_empty(pio, sm))
(void)pio_i2c_get(pio, sm);
pio_i2c_put16(pio, sm, (addr << 2) | 3u);
uint32_t tx_remain = len; // Need to stuff 0xff bytes in to get clocks
bool first = true;
while ((tx_remain || len) && !pio_i2c_check_error(pio, sm)) {
if (tx_remain && !pio_sm_is_tx_fifo_full(pio, sm)) {
--tx_remain;
pio_i2c_put16(pio, sm, (0xffu << 1) | (tx_remain ? 0 : (1u << PIO_I2C_FINAL_LSB) | (1u << PIO_I2C_NAK_LSB)));
}
if (!pio_sm_is_rx_fifo_empty(pio, sm)) {
if (first) {
// Ignore returned address byte
(void)pio_i2c_get(pio, sm);
first = false;
}
else {
--len;
*rxbuf++ = pio_i2c_get(pio, sm);
}
}
}
pio_i2c_stop(pio, sm);
pio_i2c_wait_idle(pio, sm);
if (pio_i2c_check_error(pio, sm)) {
err = -1;
pio_i2c_resume_after_error(pio, sm);
pio_i2c_stop(pio, sm);
}
return err;
}
pio_i2c.h
/**
* Copyright (c) 2021 Raspberry Pi (Trading) Ltd.
*
* SPDX-License-Identifier: BSD-3-Clause
*/
#ifndef _PIO_I2C_H
#define _PIO_I2C_H
#include "iic.pio.h"
// ----------------------------------------------------------------------------
// Low-level functions
void pio_i2c_start(PIO pio, uint sm);
void pio_i2c_stop(PIO pio, uint sm);
void pio_i2c_repstart(PIO pio, uint sm);
bool pio_i2c_check_error(PIO pio, uint sm);
void pio_i2c_resume_after_error(PIO pio, uint sm);
// If I2C is ok, block and push data. Otherwise fall straight through.
void pio_i2c_put_or_err(PIO pio, uint sm, uint16_t data);
uint8_t pio_i2c_get(PIO pio, uint sm);
// ----------------------------------------------------------------------------
// Transaction-level functions
int pio_i2c_write_blocking(PIO pio, uint sm, uint8_t addr, uint8_t *txbuf, uint len);
int pio_i2c_read_blocking(PIO pio, uint sm, uint8_t addr, uint8_t *rxbuf, uint len);
#endif
iic.pio.h
// -------------------------------------------------- //
// This file is autogenerated by pioasm; do not edit! //
// -------------------------------------------------- //
#pragma once
#if !PICO_NO_HARDWARE
#include "hardware/pio.h"
#endif
// --- //
// i2c //
// --- //
#define i2c_wrap_target 12
#define i2c_wrap 17
#define i2c_offset_entry_point 12u
static const uint16_t i2c_program_instructions[] = {
0x008c, // 0: jmp y--, 12
0xc030, // 1: irq wait 0 rel
0xe027, // 2: set x, 7
0x6781, // 3: out pindirs, 1 [7]
0xba42, // 4: nop side 1 [2]
0x24a1, // 5: wait 1 pin, 1 [4]
0x4701, // 6: in pins, 1 [7]
0x1743, // 7: jmp x--, 3 side 0 [7]
0x6781, // 8: out pindirs, 1 [7]
0xbf42, // 9: nop side 1 [7]
0x27a1, // 10: wait 1 pin, 1 [7]
0x12c0, // 11: jmp pin, 0 side 0 [2]
// .wrap_target
0x6026, // 12: out x, 6
0x6041, // 13: out y, 1
0x0022, // 14: jmp !x, 2
0x6060, // 15: out null, 32
0x60f0, // 16: out exec, 16
0x0050, // 17: jmp x--, 16
// .wrap
};
#if !PICO_NO_HARDWARE
static const struct pio_program i2c_program = {
.instructions = i2c_program_instructions,
.length = 18,
.origin = -1,
};
static inline pio_sm_config i2c_program_get_default_config(uint offset) {
pio_sm_config c = pio_get_default_sm_config();
sm_config_set_wrap(&c, offset + i2c_wrap_target, offset + i2c_wrap);
sm_config_set_sideset(&c, 2, true, true);
return c;
}
#include "hardware/clocks.h"
#include "hardware/gpio.h"
//=======================================================
// 初始化 PIO I²C 状态机
// 参数:
// pio - PIO 控制器
// sm - 状态机编号
// offset - 程序偏移地址
// pin_sda - SDA 引脚
// pin_scl - SCL 引脚(必须是 SDA+1)
//=======================================================
static inline void i2c_program_init(PIO pio, uint sm, uint offset, uint pin_sda, uint pin_scl) {
assert(pin_scl == pin_sda + 1);
pio_sm_config c = i2c_program_get_default_config(offset);
// 配置 IO 功能:OUT/SET/IN/SIDESET/JMP PIN
sm_config_set_out_pins(&c, pin_sda, 1);
sm_config_set_set_pins(&c, pin_sda, 1);
sm_config_set_in_pins(&c, pin_sda);
sm_config_set_sideset_pins(&c, pin_scl);
sm_config_set_jmp_pin(&c, pin_sda);
// 配置移位寄存器
sm_config_set_out_shift(&c, false, true, 16); // 自动拉取 16bit
sm_config_set_in_shift(&c, false, true, 8); // 自动推送 8bit
// 设置 I²C 时钟:系统时钟 / (32 * 100kHz)
float div = (float)clock_get_hz(clk_sys) / (32 * 100000);
sm_config_set_clkdiv(&c, div);
//----------------------------------------
// 启动前避免"毛刺"影响 I²C 总线
//----------------------------------------
gpio_pull_up(pin_scl);
gpio_pull_up(pin_sda);
uint32_t both_pins = (1u << pin_sda) | (1u << pin_scl);
pio_sm_set_pins_with_mask(pio, sm, both_pins, both_pins);
pio_sm_set_pindirs_with_mask(pio, sm, both_pins, both_pins);
pio_gpio_init(pio, pin_sda);
gpio_set_oeover(pin_sda, GPIO_OVERRIDE_INVERT); // 反向 OE 以符合 I²C 开漏性质
pio_gpio_init(pio, pin_scl);
gpio_set_oeover(pin_scl, GPIO_OVERRIDE_INVERT);
pio_sm_set_pins_with_mask(pio, sm, 0, both_pins);
//----------------------------------------
// 清除 IRQ 防止错误触发系统中断
//----------------------------------------
pio_set_irq0_source_enabled(pio, (enum pio_interrupt_source)((uint) pis_interrupt0 + sm), false);
pio_set_irq1_source_enabled(pio, (enum pio_interrupt_source)((uint) pis_interrupt0 + sm), false);
pio_interrupt_clear(pio, sm);
//----------------------------------------
// 初始化并启动 PIO 状态机
//----------------------------------------
pio_sm_init(pio, sm, offset + i2c_offset_entry_point, &c);
pio_sm_set_enabled(pio, sm, true);
}
#endif
// ----------- //
// set_scl_sda //
// ----------- //
#define set_scl_sda_wrap_target 0
#define set_scl_sda_wrap 3
static const uint16_t set_scl_sda_program_instructions[] = {
// .wrap_target
0xf780, // 0: set pindirs, 0 side 0 [7]
0xf781, // 1: set pindirs, 1 side 0 [7]
0xff80, // 2: set pindirs, 0 side 1 [7]
0xff81, // 3: set pindirs, 1 side 1 [7]
// .wrap
};
#if !PICO_NO_HARDWARE
static const struct pio_program set_scl_sda_program = {
.instructions = set_scl_sda_program_instructions,
.length = 4,
.origin = -1,
};
static inline pio_sm_config set_scl_sda_program_get_default_config(uint offset) {
pio_sm_config c = pio_get_default_sm_config();
sm_config_set_wrap(&c, offset + set_scl_sda_wrap_target, offset + set_scl_sda_wrap);
sm_config_set_sideset(&c, 2, true, false);
return c;
}
// 指令表索引定义
enum {
I2C_SC0_SD0 = 0,
I2C_SC0_SD1,
I2C_SC1_SD0,
I2C_SC1_SD1
};
#endif