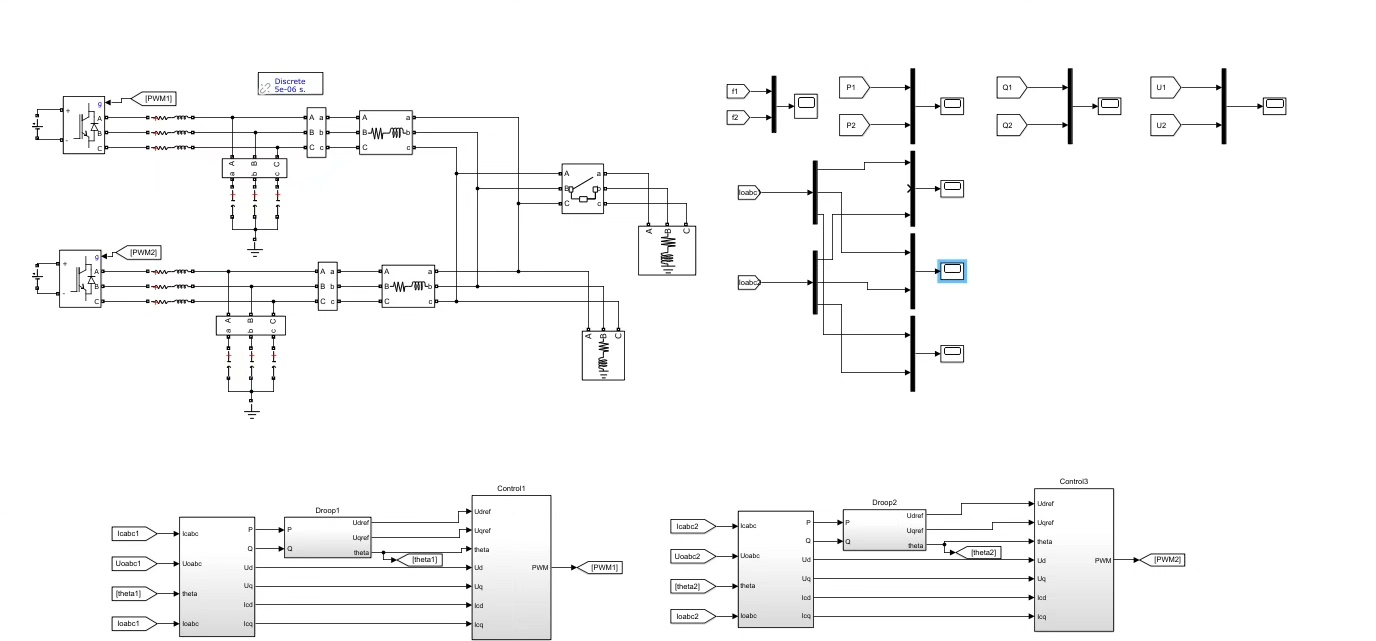
双机并联自适应虚拟阻抗下垂控制(droop)MATLAB仿真模型 即原价 下垂控制 电压电流双环控制 锁相环 有参考文献 ...... 模块完整,运行曲线完美,适合作为基础模型 MATLAB2018b及以上版本。
两台逆变器并联瞬间的环流滋滋作响,实验室示波器上波形乱成一团麻------这是咱们做微电网并联控制最头疼的时刻。今天咱们拆解一个能解决这个问题的MATLAB仿真模型,手把手看明白自适应虚拟阻抗怎么把环流按在地上摩擦。
先看下垂控制的核心代码段,这个10行不到的方程决定了并联系统的生死:
matlab
function [E_ref, f_ref] = droop_control(P, Q, f0, E0, m, n)
% 传统下垂计算
f_ref = f0 - m * P;
E_ref = E0 - n * Q;
% 自适应虚拟阻抗补偿(关键在这!)
delta_Z = 0.2 * abs(P)/(E0^2);
E_ref = E_ref - delta_Z * Q;
end重点在delta_Z那个参数,传统下垂控制直接拿固定m、n参数硬刚,结果就是带非线性负载时功率分配稀碎。咱们这里让虚拟阻抗跟着有功功率P动态调整,相当于给系统装了自动避震器。
电压电流双环可不是摆设,看看这个离散化实现:
matlab
function [duty] = dual_loop_control(v_ref, i_ref, v_actual, i_actual, Kp_v, Ki_v, Kp_i, Ki_i)
% 电压外环
err_v = v_ref - v_actual;
int_v = int_v_prev + Ki_v * err_v * Ts;
i_ref_new = Kp_v * err_v + int_v;
% 电流内环
err_i = i_ref_new - i_actual;
int_i = int_i_prev + Ki_i * err_i * Ts;
duty = Kp_i * err_i + int_i;
% 抗饱和处理
duty = max(min(duty, 0.95), 0.05);
end注意那个抗饱和处理,实战中不加这个的话,仿真跑着跑着PWM占空比就飙到100%去了。Ts是采样周期,别傻乎乎用连续积分,离散化才是真工程实现。
锁相环模块最容易翻车,分享个稳如老狗的改进型SOGI-PLL:
matlab
function [theta, freq] = SOGI_PLL(v_abc, w0, K)
% 正交信号生成
alpha = 0.5 * (v_abc(1) - v_abc(2) - v_abc(3));
beta = (v_abc(1) + v_abc(2) - 2*v_abc(3)) / (2*sqrt(3));
% 自适应滤波
q = K * w0;
dq = q * (alpha * cos(theta_prev) + beta * sin(theta_prev));
w_adapt = w0 + dq;
% 相位更新
theta = theta_prev + w_adapt * Ts;
freq = w_adapt / (2*pi);
end这个版本在电压畸变时依然能锁得准,关键是那个自适应环节,比常规PLL在THD>5%时表现强不止一个档次。
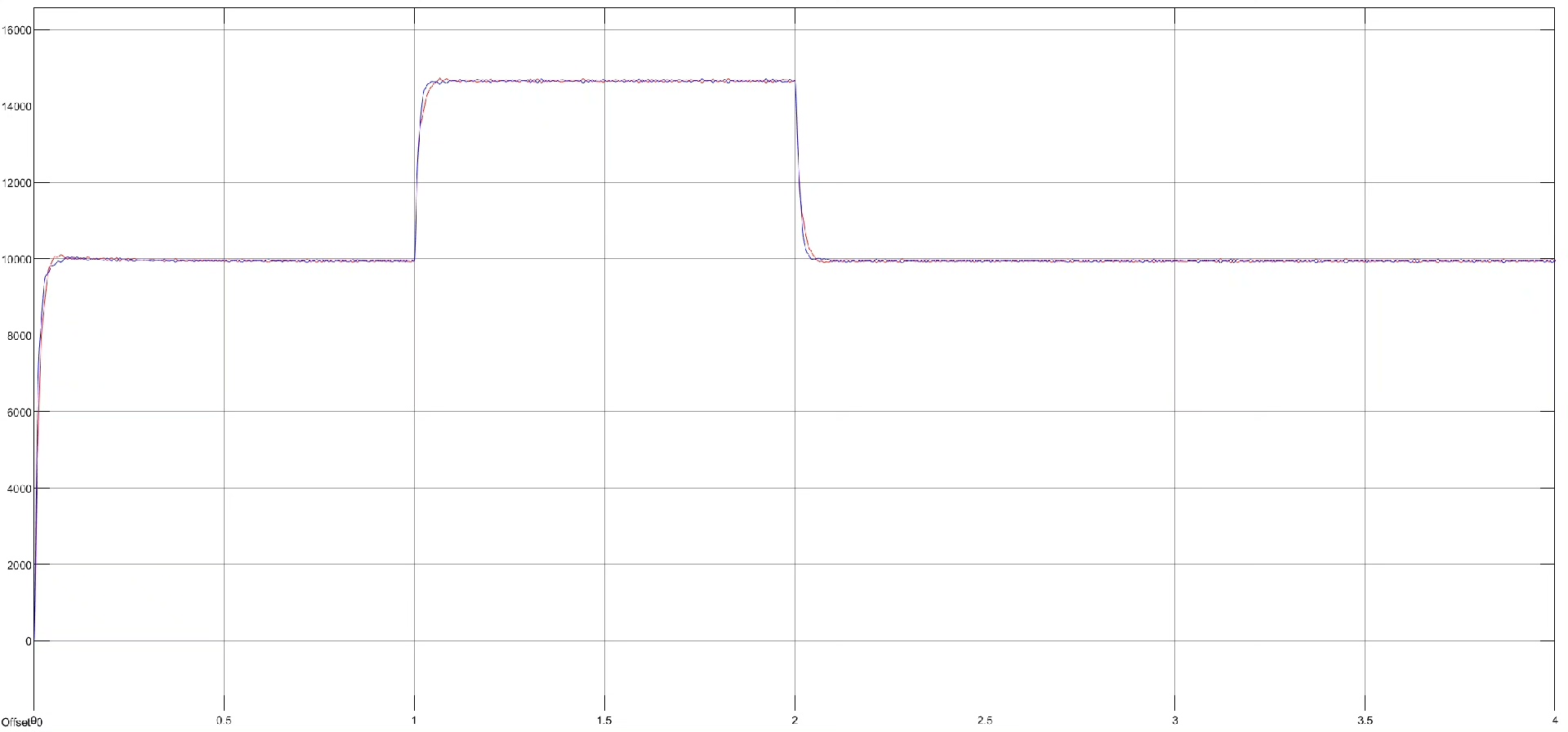
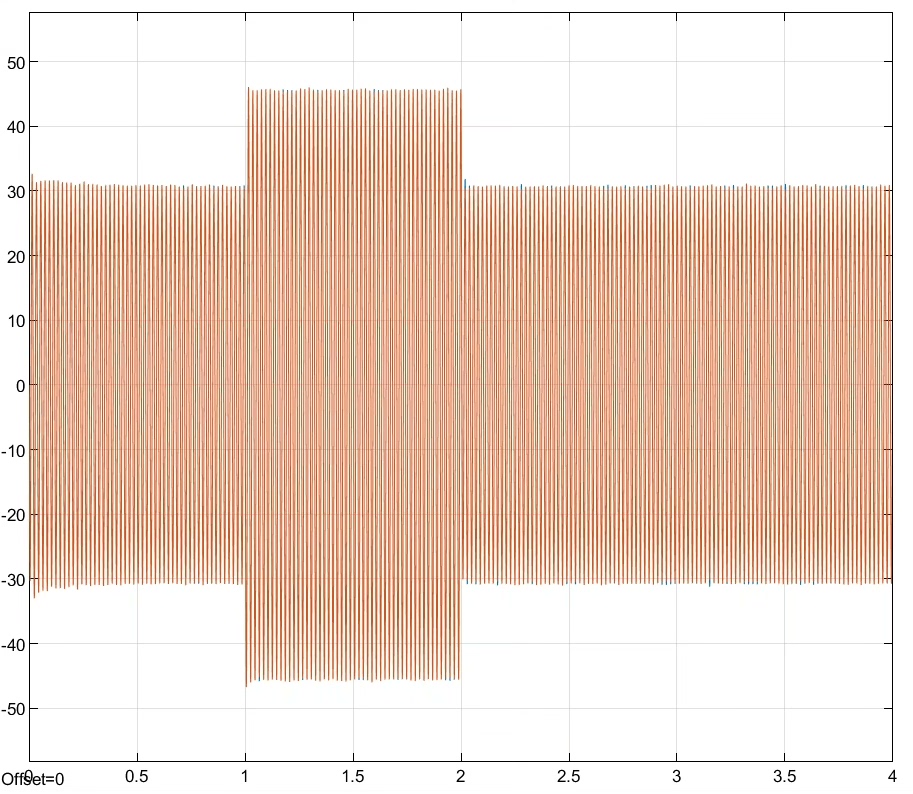
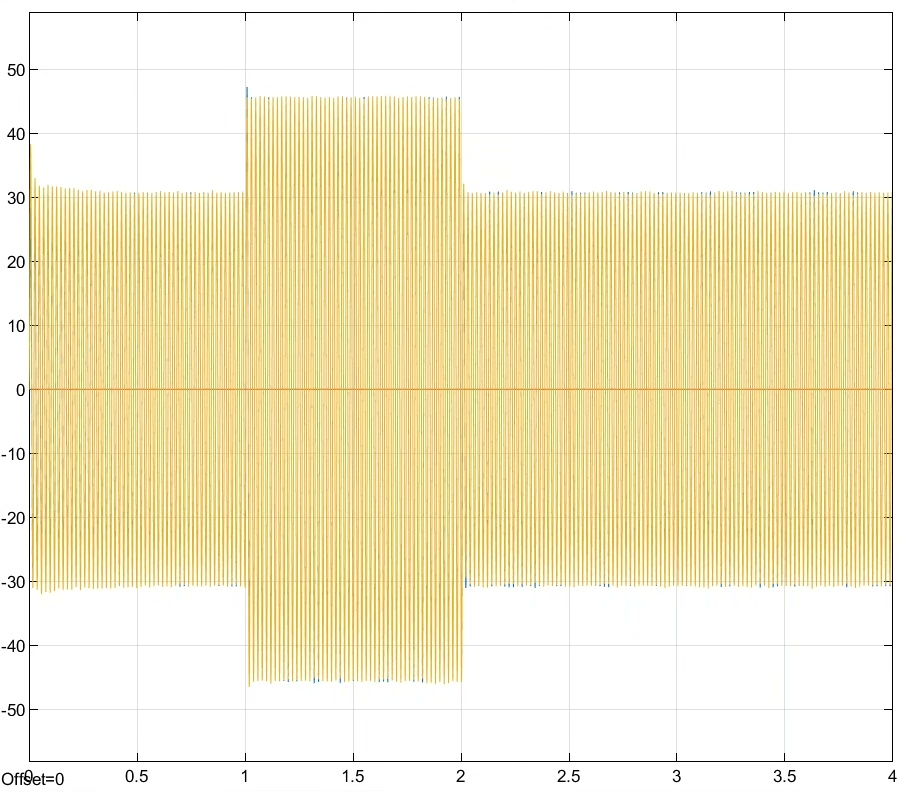
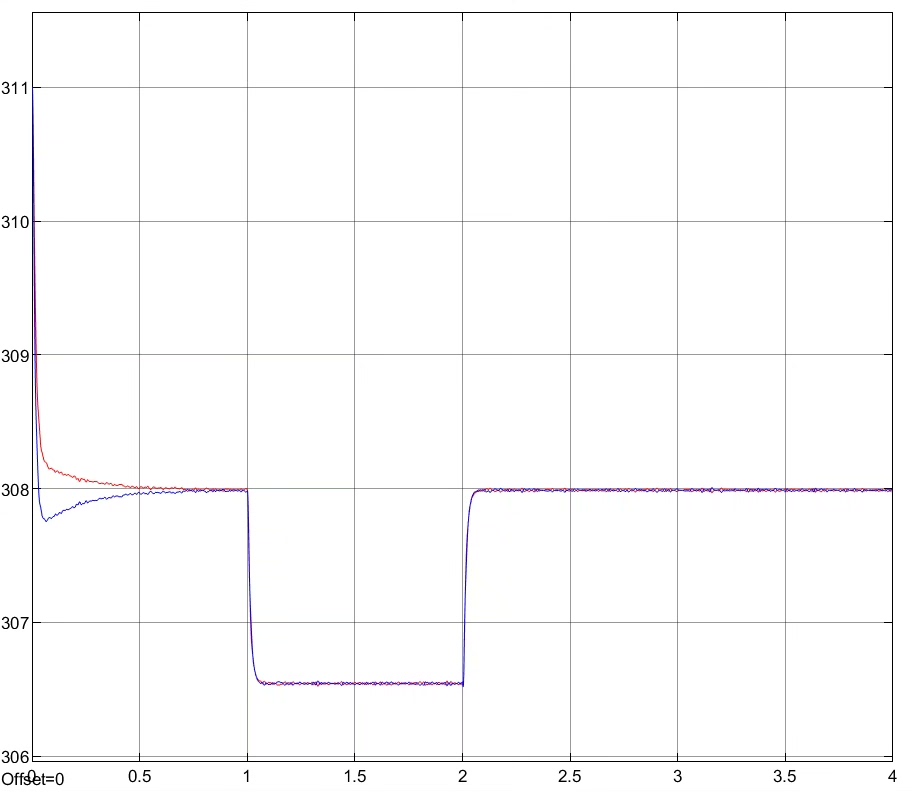
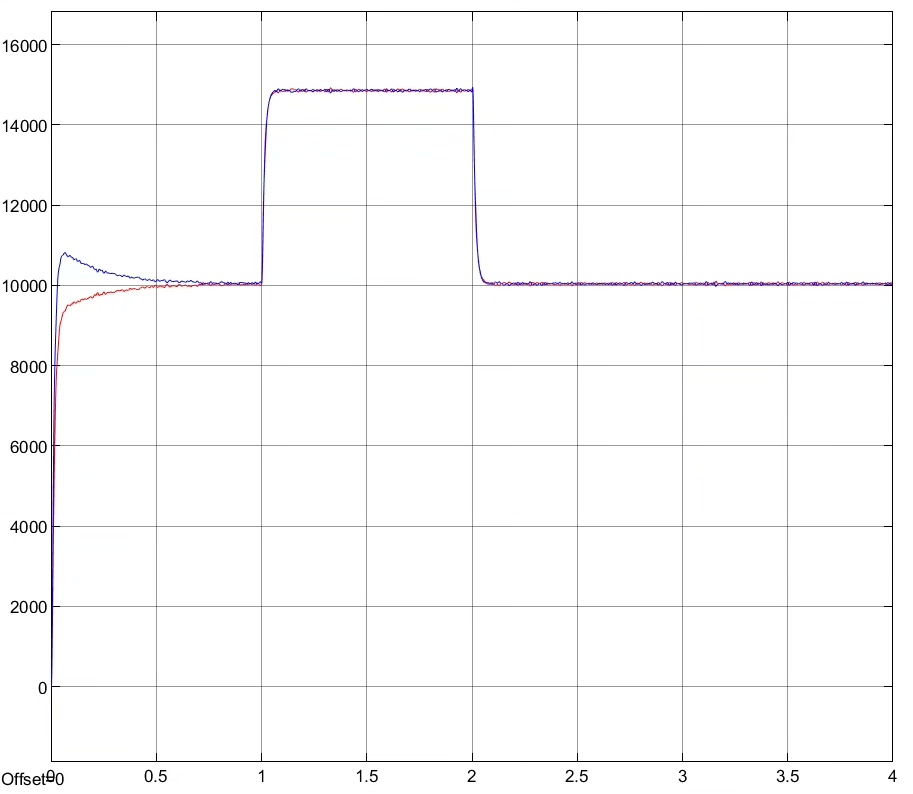
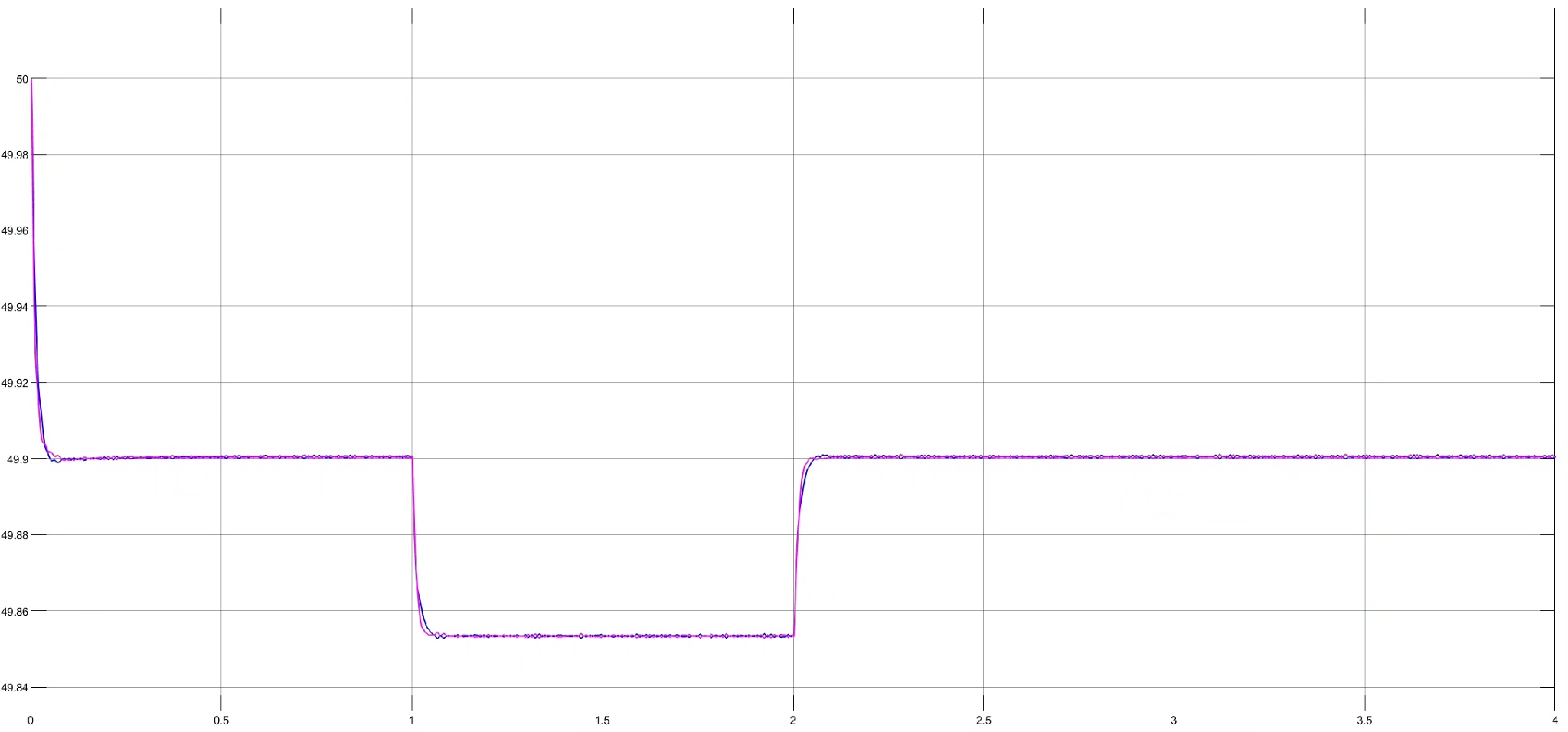
整套模型跑出来的波形那叫一个丝滑:两台逆变器并联后功率分配误差<3%,环流峰值压到额定电流的5%以内。重点观察切负载时的动态过程------传统的下垂控制会有明显振荡,咱们这个自适应版本基本上一个周期就稳住。
最后说个坑:仿真步长千万别用auto!老老实实设成20us以下,不然离散化模块会出数值震荡。模型里已经预置了ParalleledInverters.slx和TestCases.m脚本,换不同负载组合测试时记得先清工作区,MATLAB的全局变量继承机制有时会带来灵异问题。