已更新系列文章包括104、61850、modbus 、储能系统等,欢迎关注
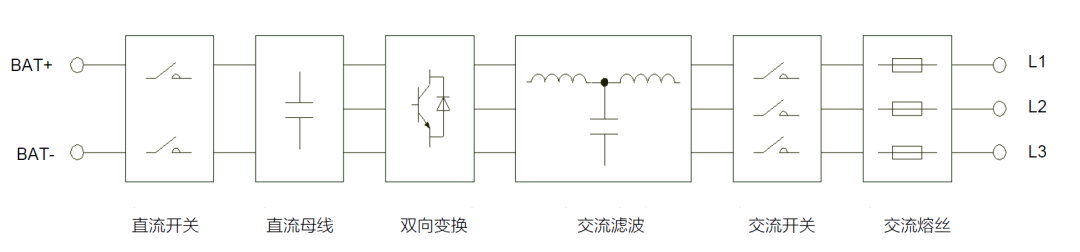
本篇将介绍PCS控制充放电电流大小原理
1、核心原理
控制电压差以驱动电流
电流总是从高电势点流向低电势点。PCS通过精确控制其 AC侧电压 和 DC侧电压,制造出可控的电压差,从而精确控制电流的大小和方向。
控制逻辑如下:
-
测量 :高精度传感器实时测量实际流入电池的电流
I_actual。 -
比较 :控制器计算误差:
Error = I_ref - I_actual。-
如果
I_actual < I_ref(电流太小),误差为正。 -
如果
I_actual > I_ref(电流太大),误差为负。
-
-
调节 :这个误差信号被送入一个PI控制器。
-
PI控制器(比例-积分控制器) 是工业控制的大脑。它会根据误差的大小和持续时长,计算出一个需要调整的电压值
ΔV。 -
简单理解:误差越大、时间越长,计算出的调整量
ΔV就越大。
-
-
执行:
-
控制器命令PCS的功率电路(DC/DC变换器或直接调制AC/DC),将直流侧输出电压
V_pcs调节 为:V_pcs = V_bat + ΔV。 -
根据欧姆定律(考虑电池内阻
R_internal和线路电阻),充电电流I_charge = (V_pcs - V_bat) / (R_internal + R_line)。
-
因此,PI控制器实质上是通过动态调节 V_pcs 来控制 (V_pcs - V_bat) 这个电压差,从而精确控制电流。
2、动态工作过程
假设我们目标是将电流稳定在133A。
-
初始状态 :电流为0,误差
Error = 133A。PI控制器输出一个较大的ΔV,使V_pcs显著高于V_bat,产生一个强电压差,电流开始快速上升。 -
上升过程 :
I_actual上升,误差减小,PI控制器输出的ΔV也随之减小,V_pcs开始向V_bat靠近,电压差减小,电流上升速度放缓。 -
稳定状态 :当
I_actual达到133A时,误差为0。PI控制器会保持一个稳定的ΔV输出,使得V_pcs稳定在比V_bat高出一个恒定值的状态。此时电压差恒定,电流也稳定在133A。 -
抗干扰:如果电网波动或电池电压轻微变化导致电流偏离133A(比如降到130A),闭环控制立即启动:
- 检测到误差
+3A→ PI控制器微增ΔV→V_pcs微升 → 电压差增大 → 电流被拉回133A。
- 检测到误差
其他充电模式下的电流控制
-
恒流充电模式 :上述过程就是典型的恒流控制。电流参考值
I_ref直接由程序设定。 -
恒压充电模式 (充电末段):此时控制目标从电流变为电压。控制器以电池端电压 为控制对象,电流会随着电池电压接近目标值而自然减小。但通常会设定一个电流下限作为终止条件。
-
恒功率充电模式 :如第一步所述,需要根据实时变化的
V_bat,动态重新计算I_ref,然后再通过上述电流闭环去实现。这就构成了一个外层的"功率环"和内层的"电流环"。
3、充电过程(电网 -> 电池)
-
在交流电网侧(PCS作为整流器):
-
控制目标 :从电网吸收有功功率。
-
实现方式 :PCS通过控制其交流侧输出电压的相位略滞后于电网电压。这样,在连接电抗上,电网电压高于PCS的AC电压,电流(有功分量)从电网流向PCS内部,功率被"吸收"进来。
-
此时的能量流 :
电网 -> PCS(AC/DC) -> 内部直流母线。
-
-
在直流电池侧:
-
控制目标:将内部直流母线的电能输送给电池。
-
电压关系 :为了实现电能从PCS流向电池,PCS的直流侧输出端电压(V_pcs_dc)必须略高于电池的当前电压(V_bat)。这个正电压差(V_pcs_dc - V_bat > 0)驱动充电电流从PCS流入电池。
-
如何实现:PCS内部的DC/DC控制器或直接调制策略,会主动调节其直流侧电压,使其稳定在高于电池电压的一个设定值,这个设定值根据所需的充电电流大小来确定(根据电池内阻等参数)。
-
4、放电过程(电池 -> 电网)
-
在直流电池侧:
-
控制目标:从电池抽取电能。
-
电压关系 :此时,PCS的直流侧输入端相当于一个负载。为了从电池"抽取"电流,PCS的直流侧输入端电压(V_pcs_dc)必须略低于电池电压(V_bat)。这个负电压差(V_bat - V_pcs_dc > 0)驱动放电电流从电池流向PCS内部。
-
如何实现:PCS通过控制其功率开关,使其直流端口呈现一个"消耗电能"的电压水平。
-
-
在交流电网侧(PCS作为逆变器):
-
控制目标 :向电网输送有功功率。
-
实现方式 :PCS控制其交流侧输出电压的相位略超前于电网电压。这样,PCS的AC电压高于电网电压,电流(有功分量)从PCS流向电网,功率被"注入"电网。
-
此时的能量流 :
电池 -> PCS(DC/AC) -> 电网。
-
4、总结
为了更好地理解,我们可以将整个PCS系统想象成一个连接两个水池(电网和电池)的智能双向水泵系统:

-
充电(给电池水池注水):
-
电网侧 :水泵从"电网水池"抽水(吸收功率)。
-
电池侧 :水泵将水加压 ,使其压力高于"电池水池"的压力(V_pcs_dc > V_bat),从而将水注入电池水池。
-
-
放电(从电池水池抽水到电网):
-
电池侧 :水泵从"电池水池"抽水 ,此时水泵入口压力低于水池压力(V_pcs_dc < V_bat)。
-
电网侧 :水泵将水加压,使其压力高于"电网水池"的压力,从而将水注入电网水池
-
PCS控制充电电流大小的本质,是基于目标电流值,通过高速闭环反馈,实时、动态地调整其直流侧输出电压,使其与电池电压之间维持一个"恰到好处"的电压差。这个电压差由欧姆定律决定了最终的充电电流。
欢迎关注
往期文章推荐: