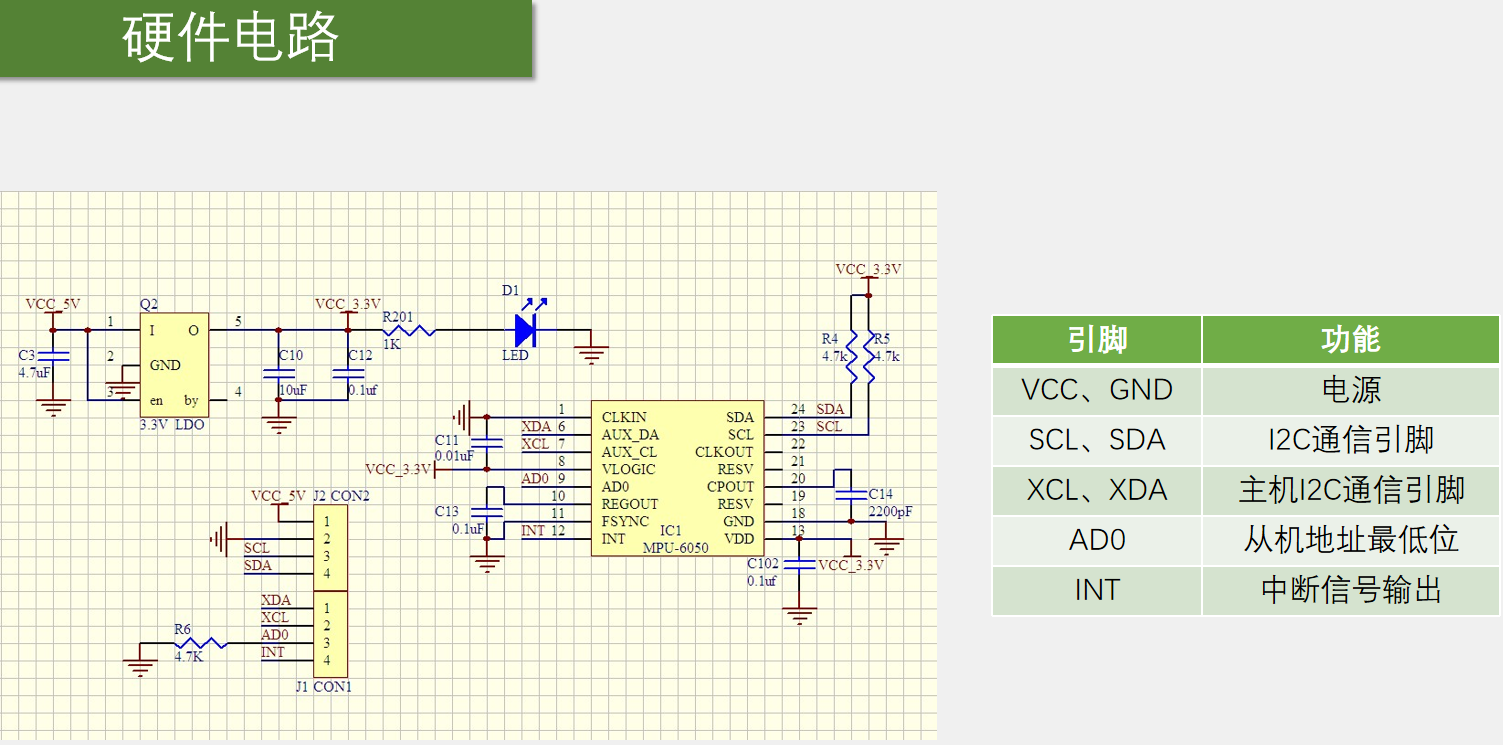
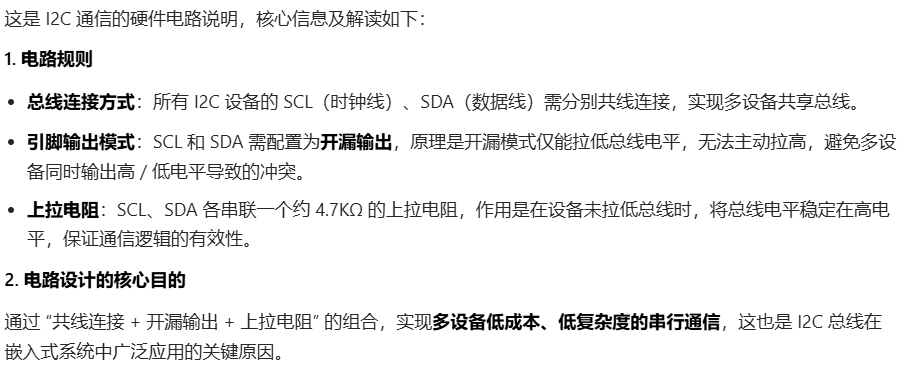
可以看到每一个的硬件设备都有SCL和SDA
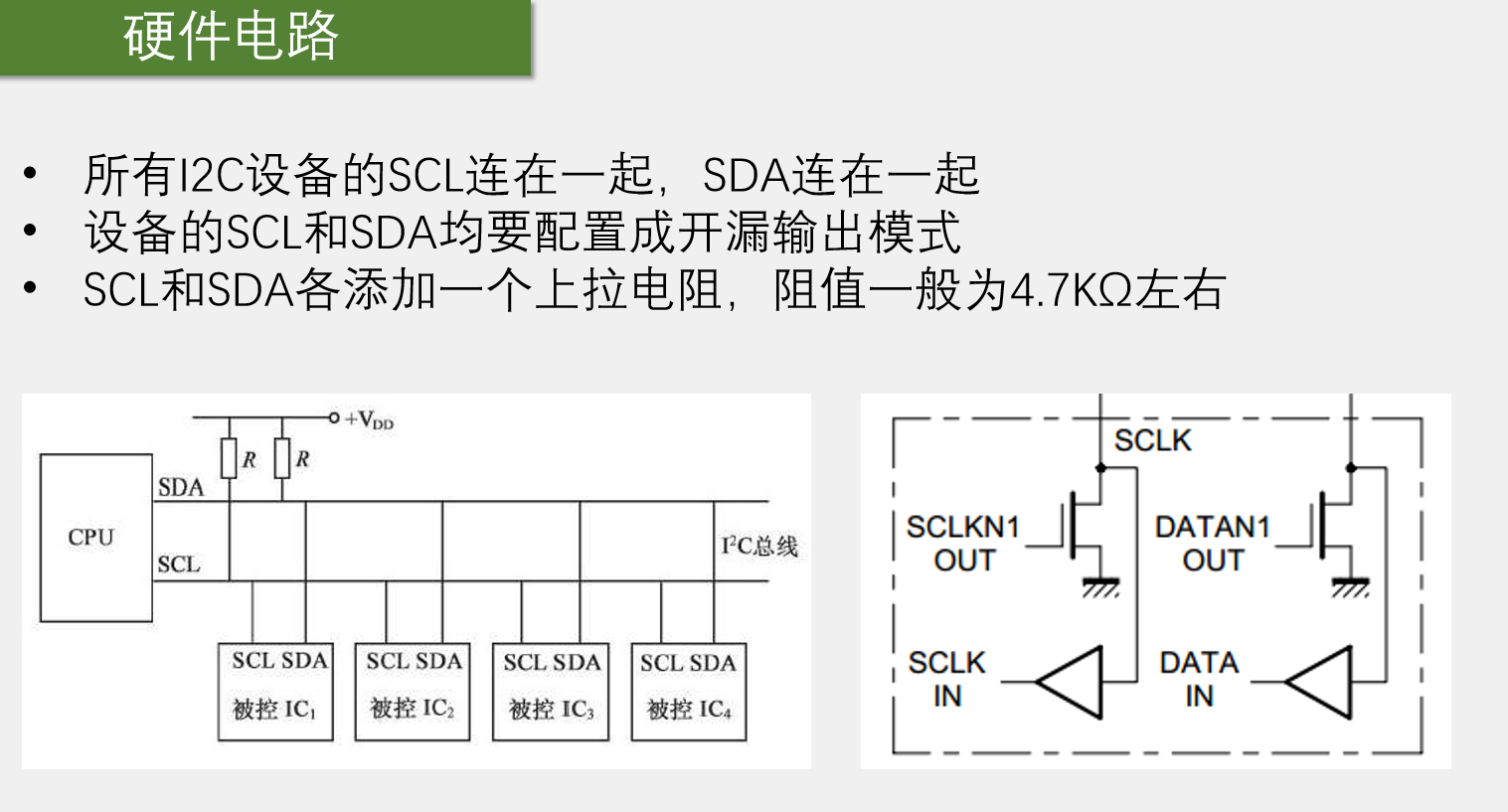

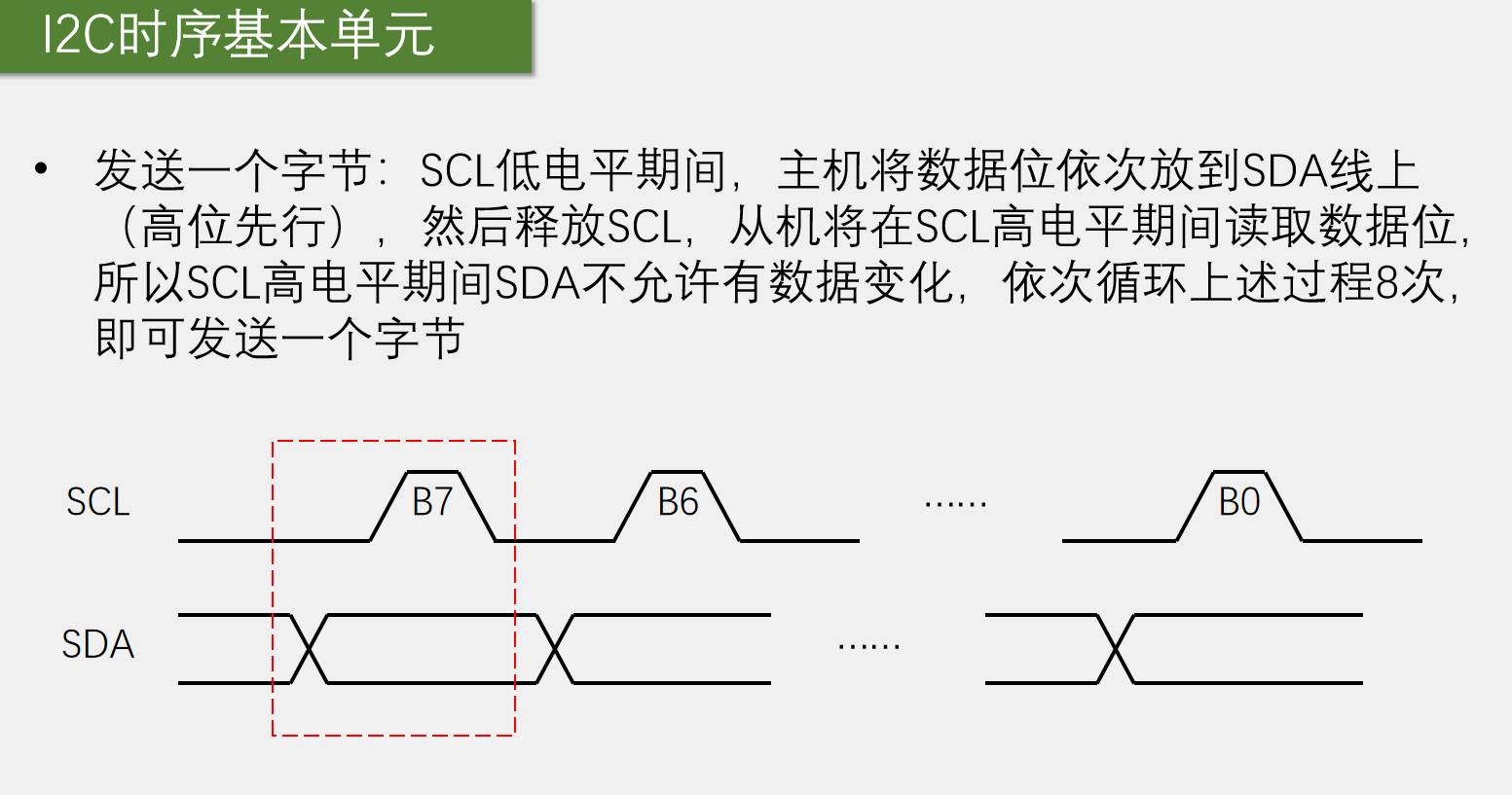
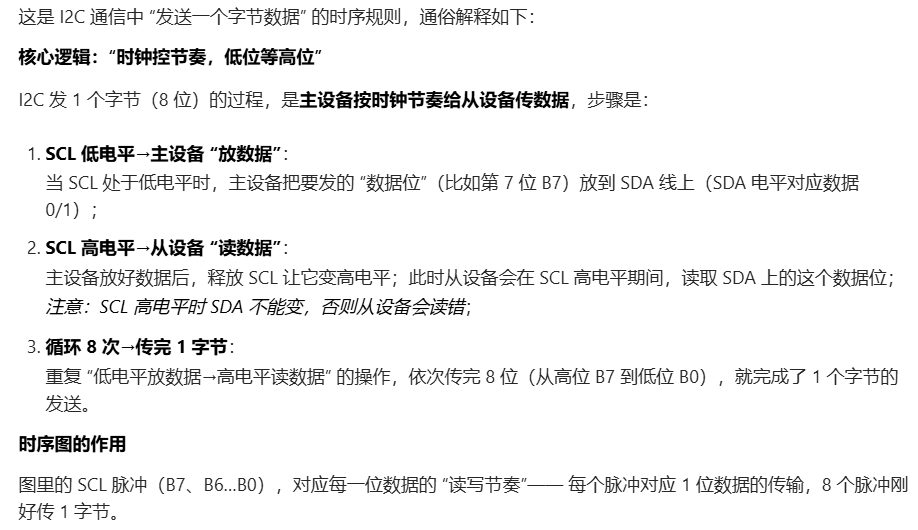
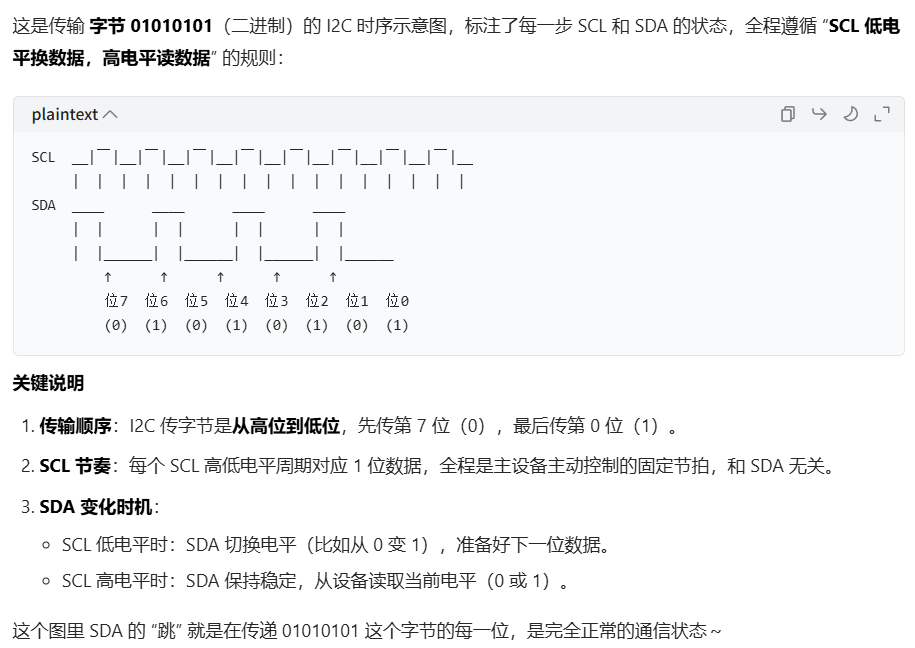
这个主机发送数据到从机,主机控制着SCL和SDA两条线,当SCL低电平的时候,准备发送数据,然后SDA线此时发送根据时序对应的数据,比如说是0还是1(高电平),然后SCL变高电平,完成发送,从机在主机SCL高电平的时候,完成接收,然后主机scl低电平准备发送另外一个数据,以此类推
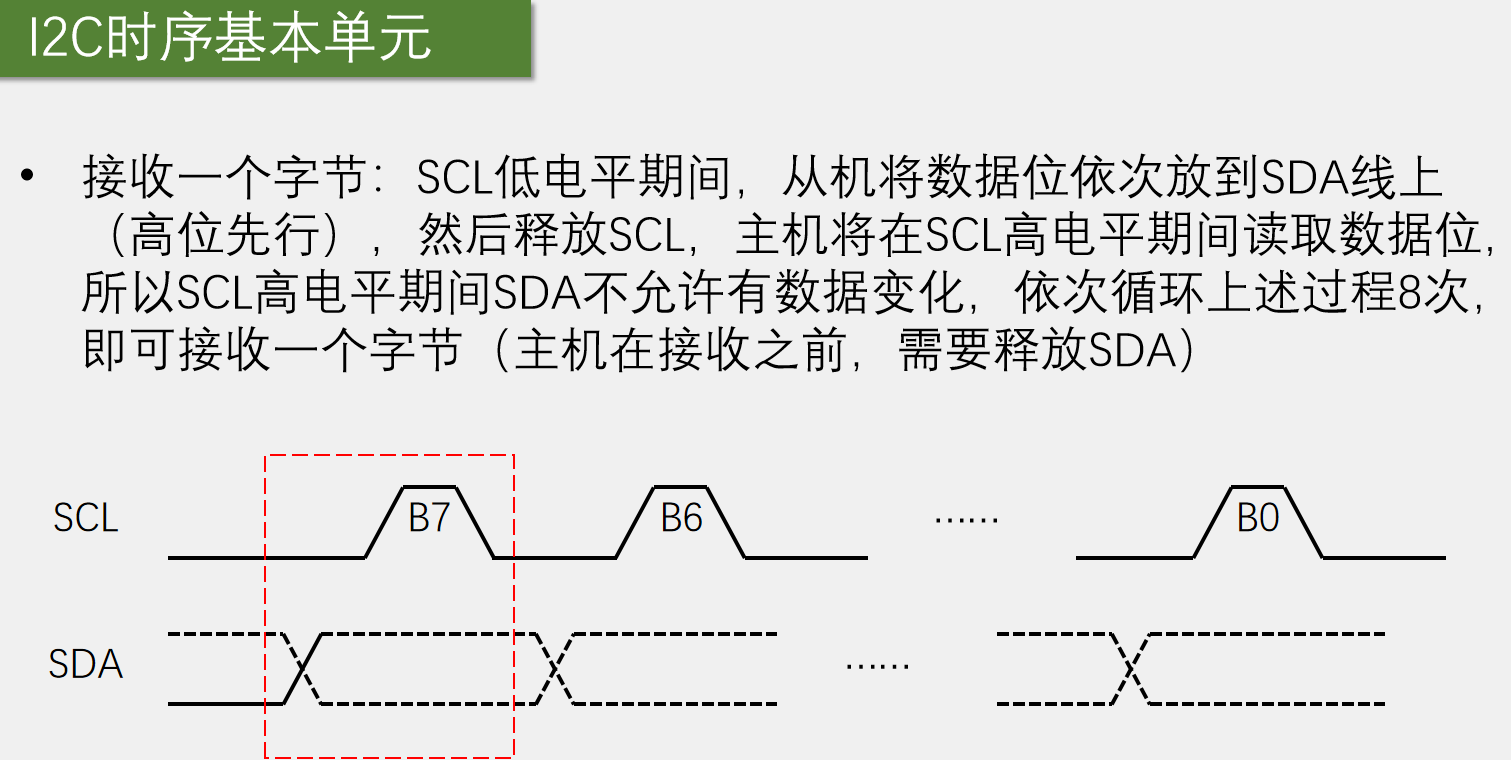
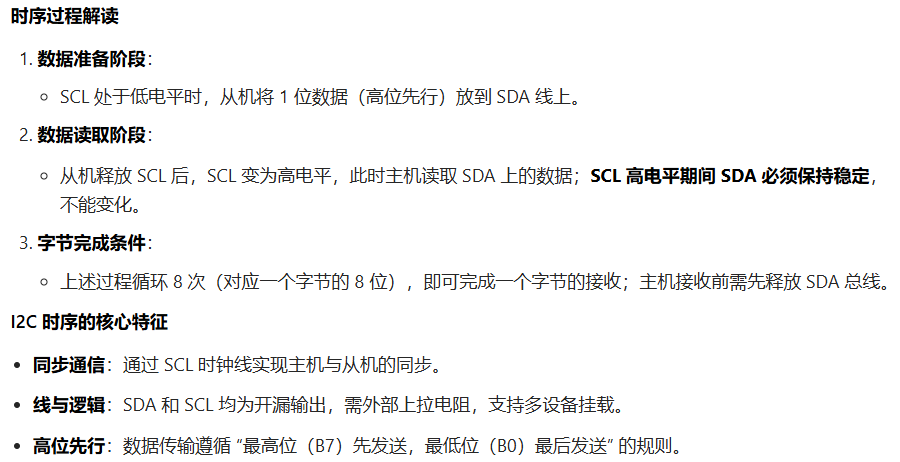
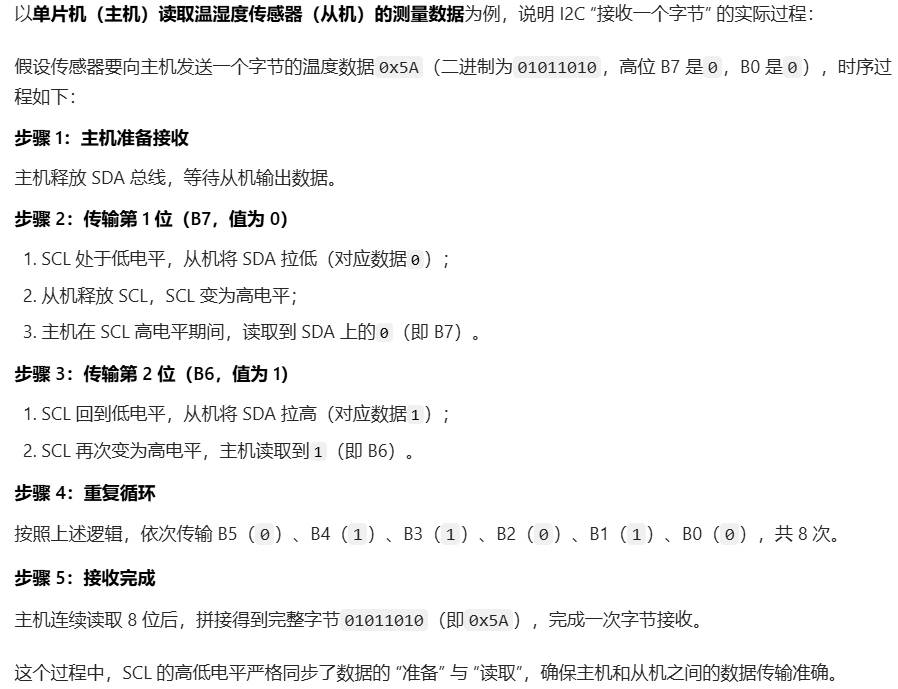
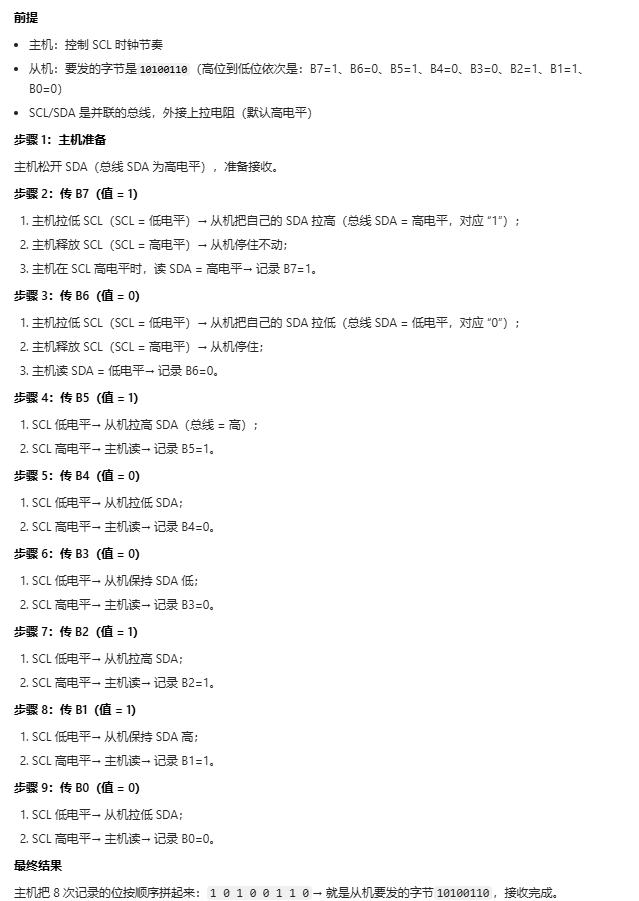
总结一下,主机接收从机数据是怎么进行操作的呢,通过SCL来进行控制,比如说当SCL为低电平的时候,从机根据数据的高低电平,将数据放到SDA上,然后SCL变成高电平,完成接收,第二个数据也是同理,就是主机将SCL低电平,准备接收,此时从机可以控制SDA传输数据位是高是低,然后SCL变为高电平,成功接受
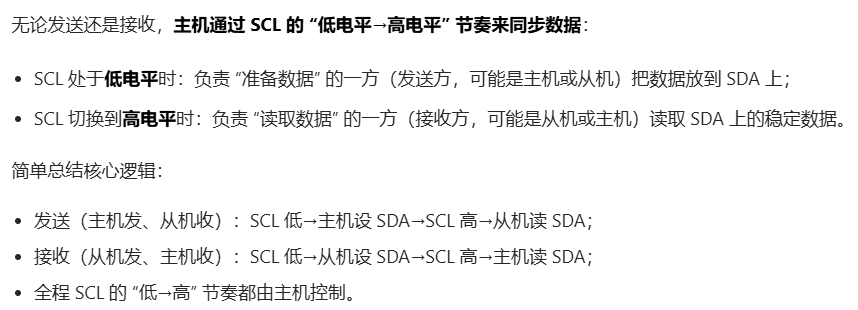
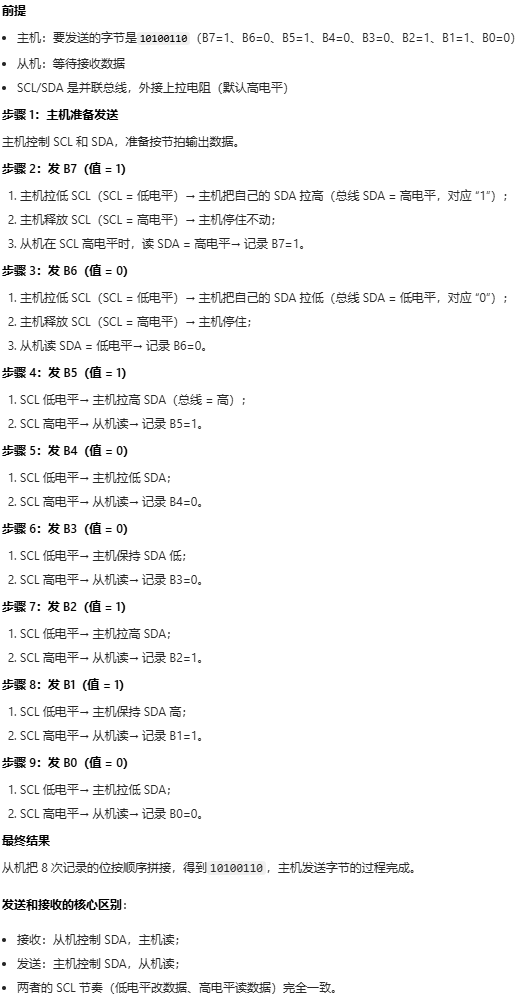
主机发送数据给从机:主机SCL低电平,此时准备数据,然后在SDA上发高电平或低电平,然后主机控制SCL为高电平,从机读数据,以此类推
从机发送数据给主机,主机SCL低电平,从机控制SDA发送数据,然后主机SCL高电平,完成接收,以此类推
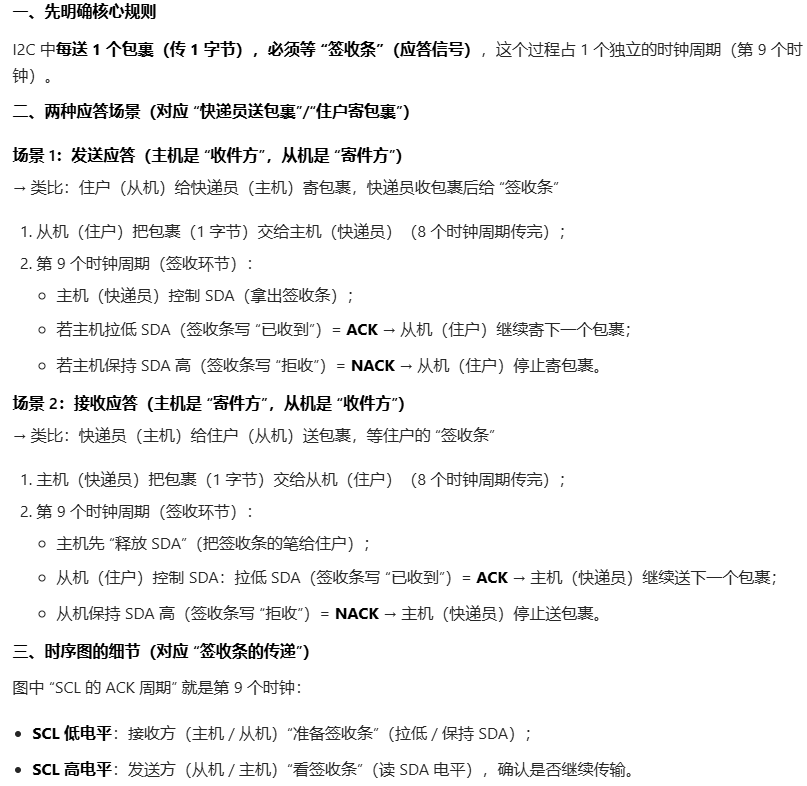
这里的意思就是说,当主机发送数据给从机的时候,当主机发送了一个字节的数据后,然后发送一个给从机,从机若是SCL低电平则继续发送,高电平则停止,同样的
当从机发送数据给主机的时候,发送完一个字节后,然后通过SDA发送一个数据,主机控制SCL,为高电平或者低电平,确认要不要接收数据
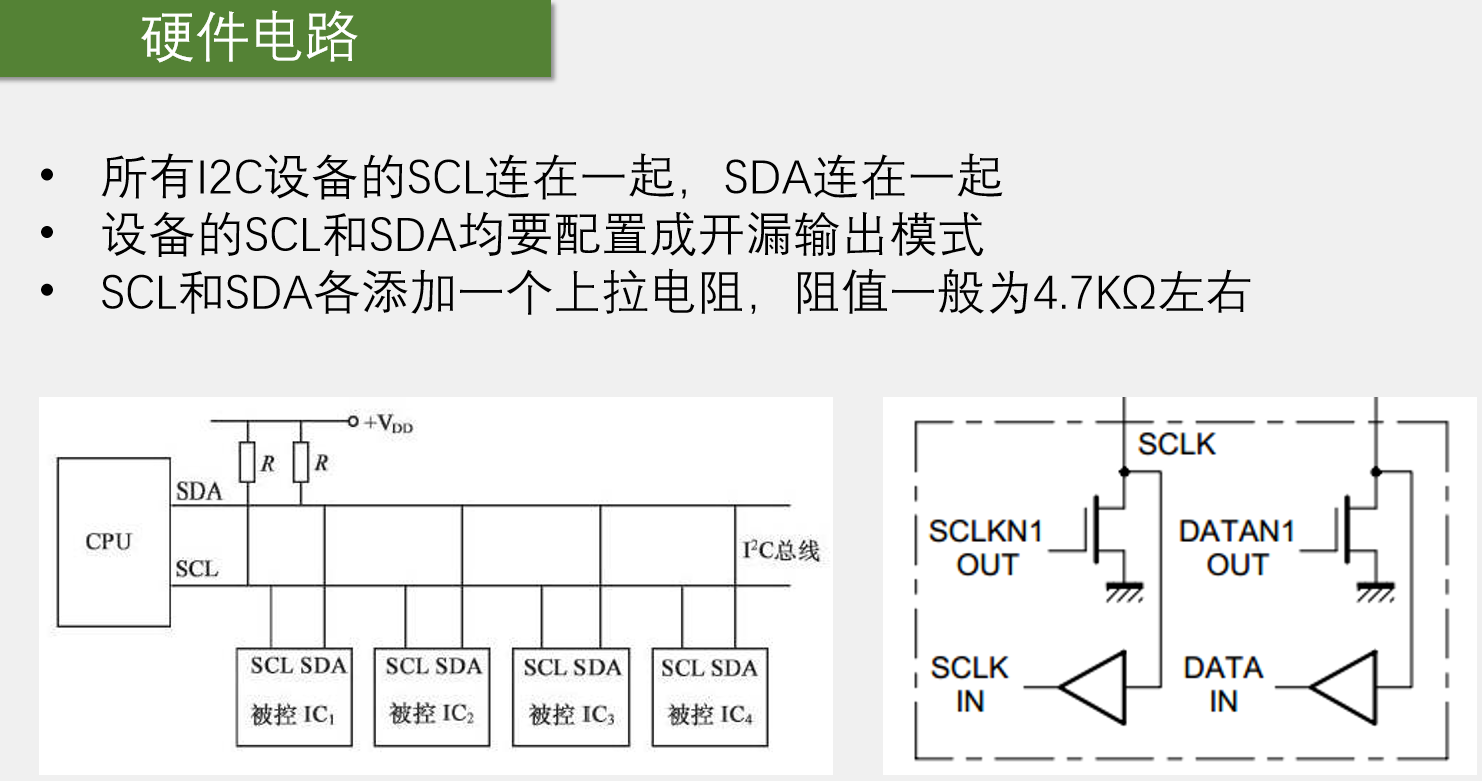
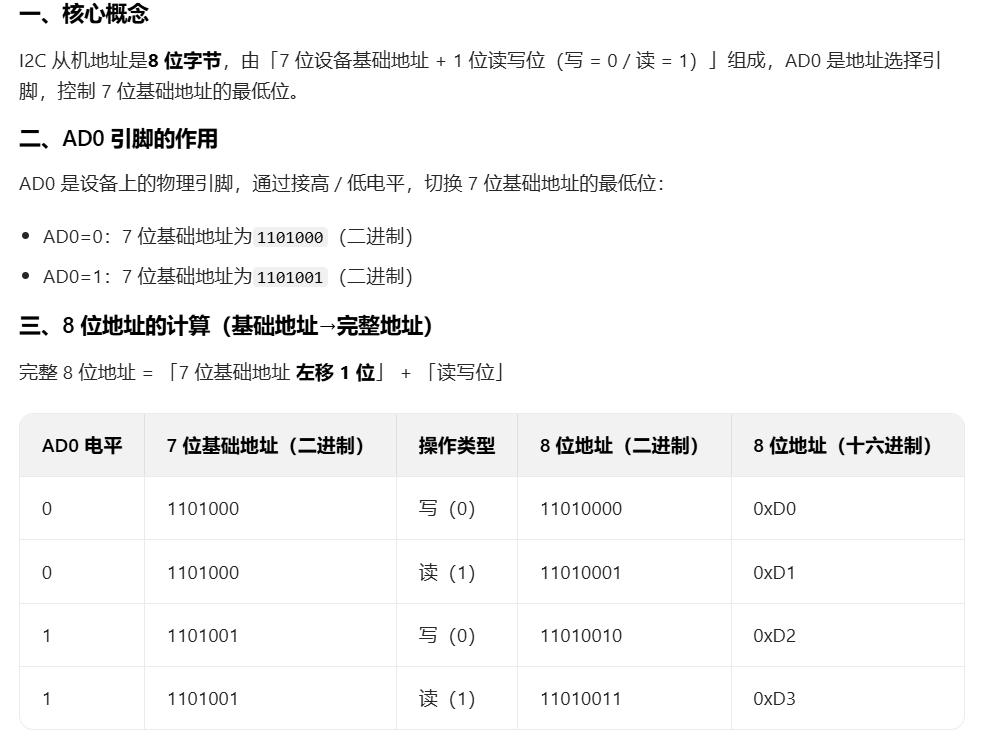
下面问题来了,有那么多的从机,主机怎么知道要控制哪一个呢,其实很简单,每一个传感器都有一个商家为他们设定的地址,可以根据手册查询,主机在使用的时候,会先发一个地址名,从机会看看和自己适不适配,然后决定自己是否呼叫
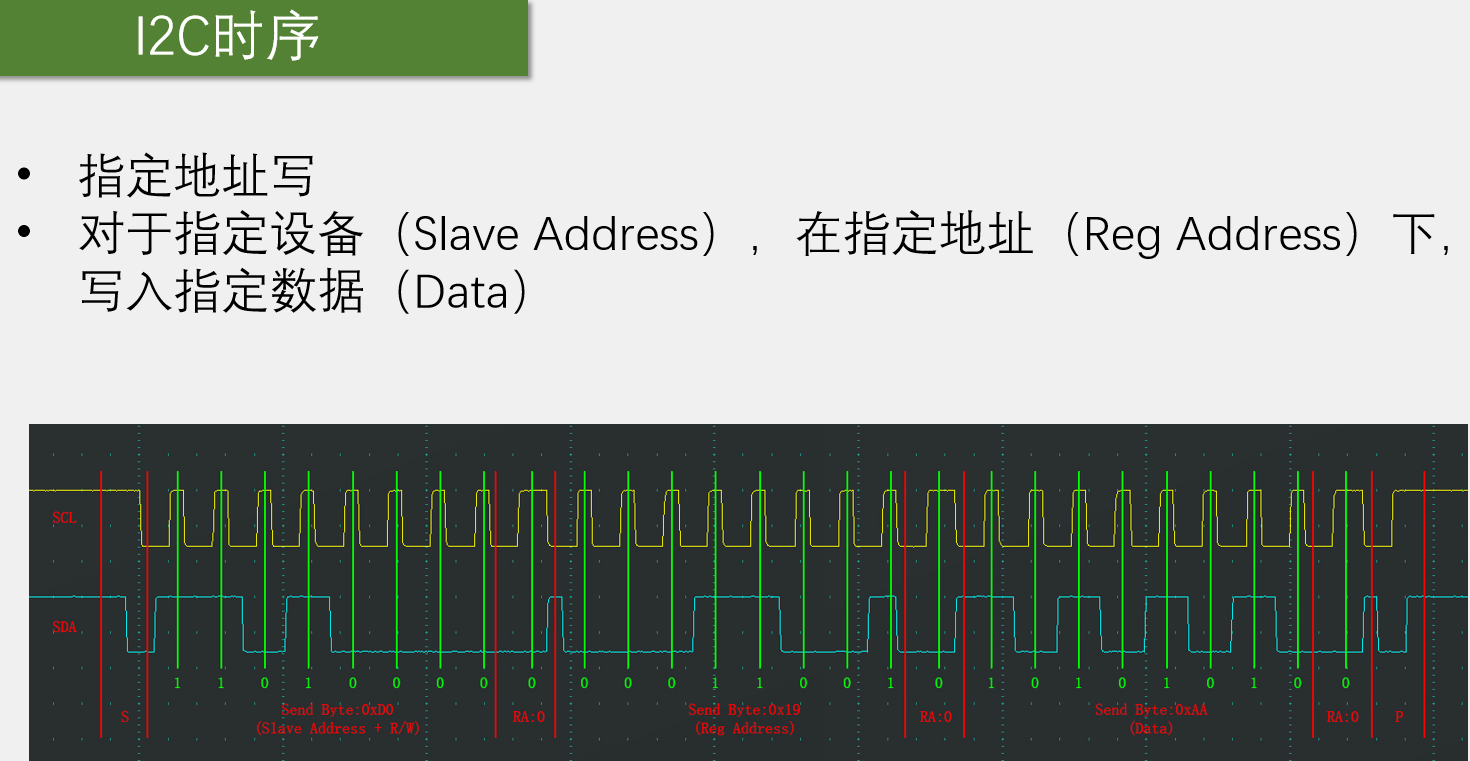
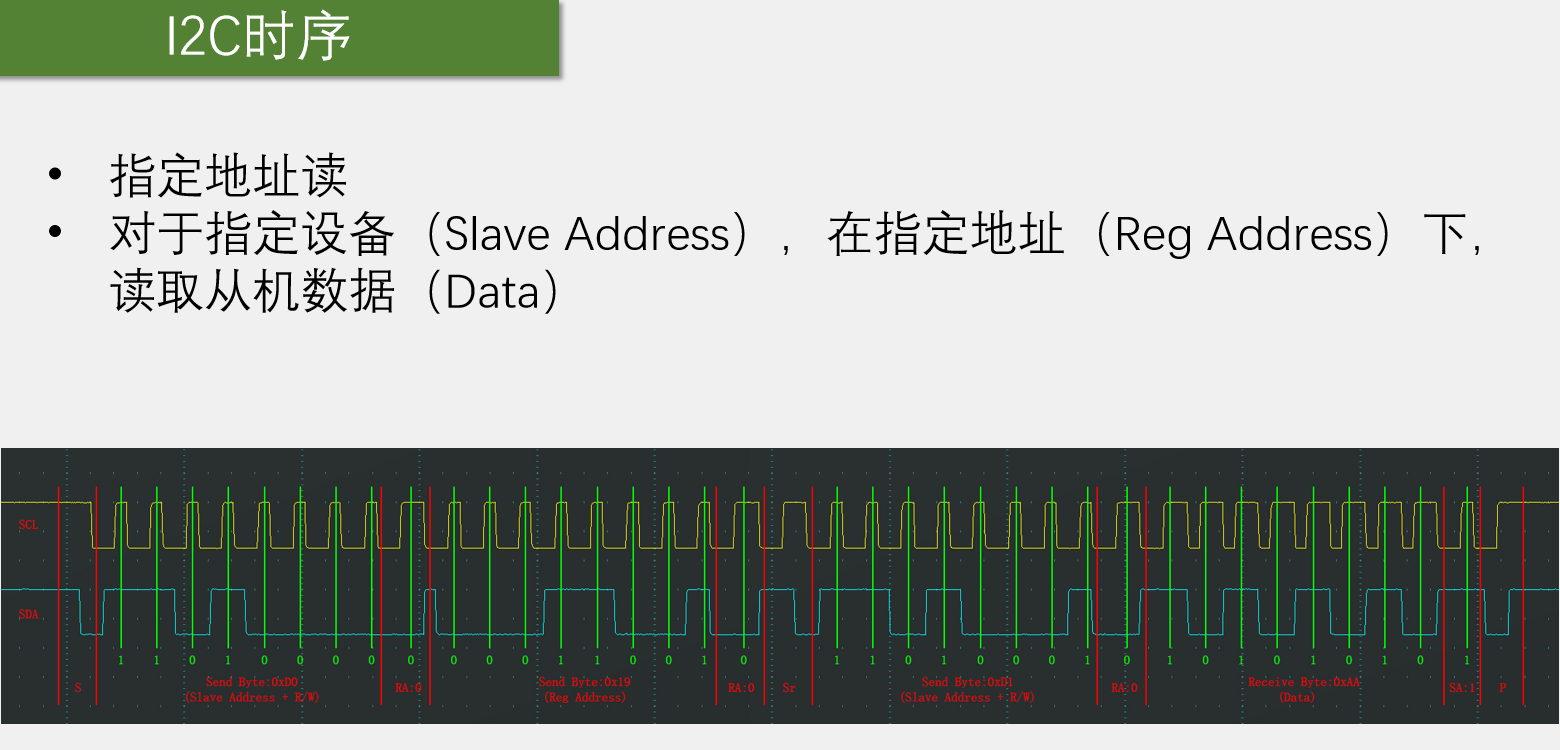
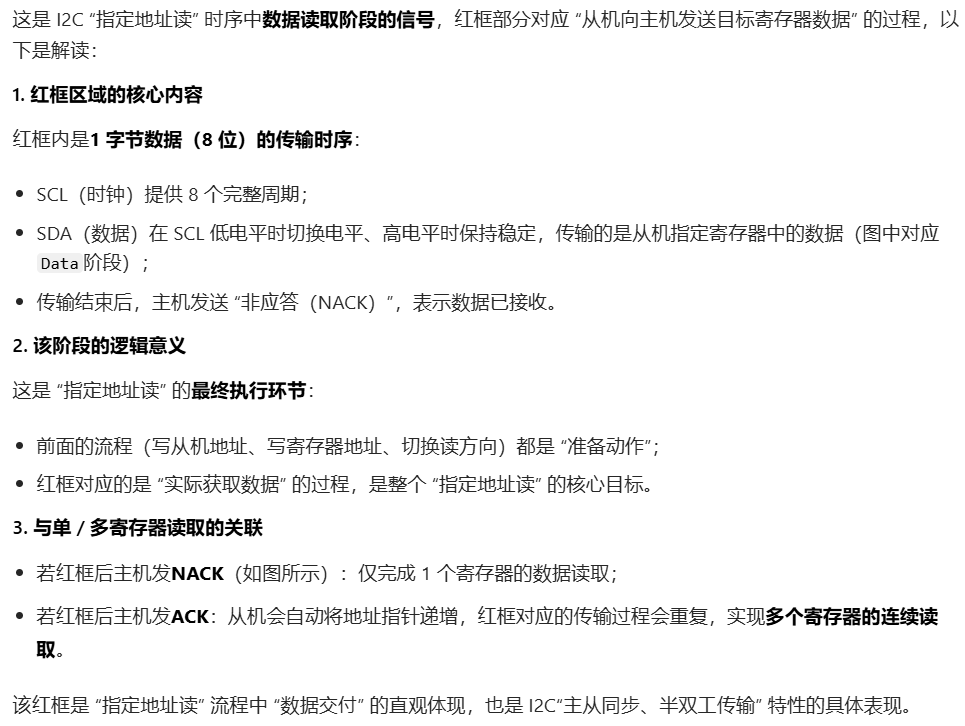
这是一个主机向从机发送数据的一个示波器过程图,首先就是主机向从机发送一个从机的地址位,以及R/W,即是写还是读的意思,然后若从机此时给一个低电平则说明应答,反之就是不应答,然后主机指定从机内部的寄存器地址位置,然后第三步才是发送数据
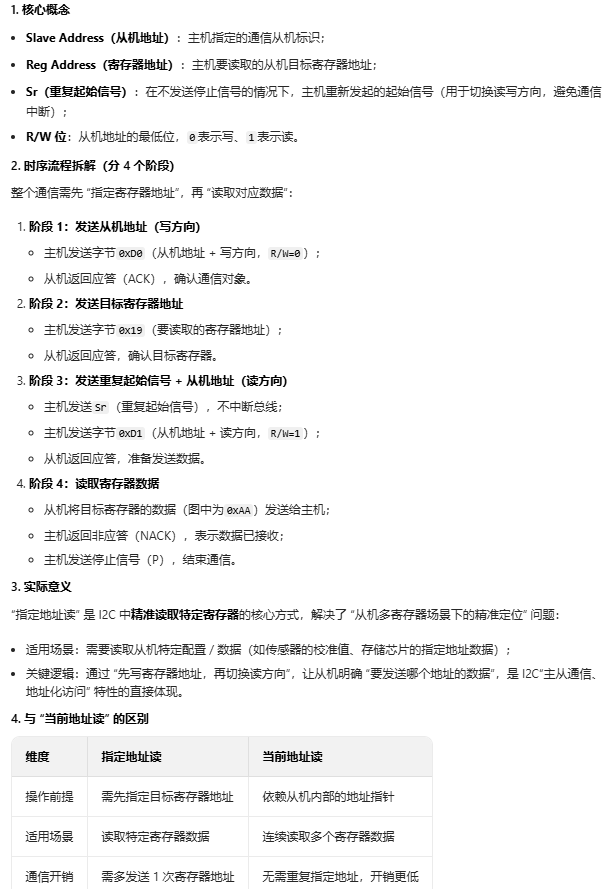
最后一句话说的很对

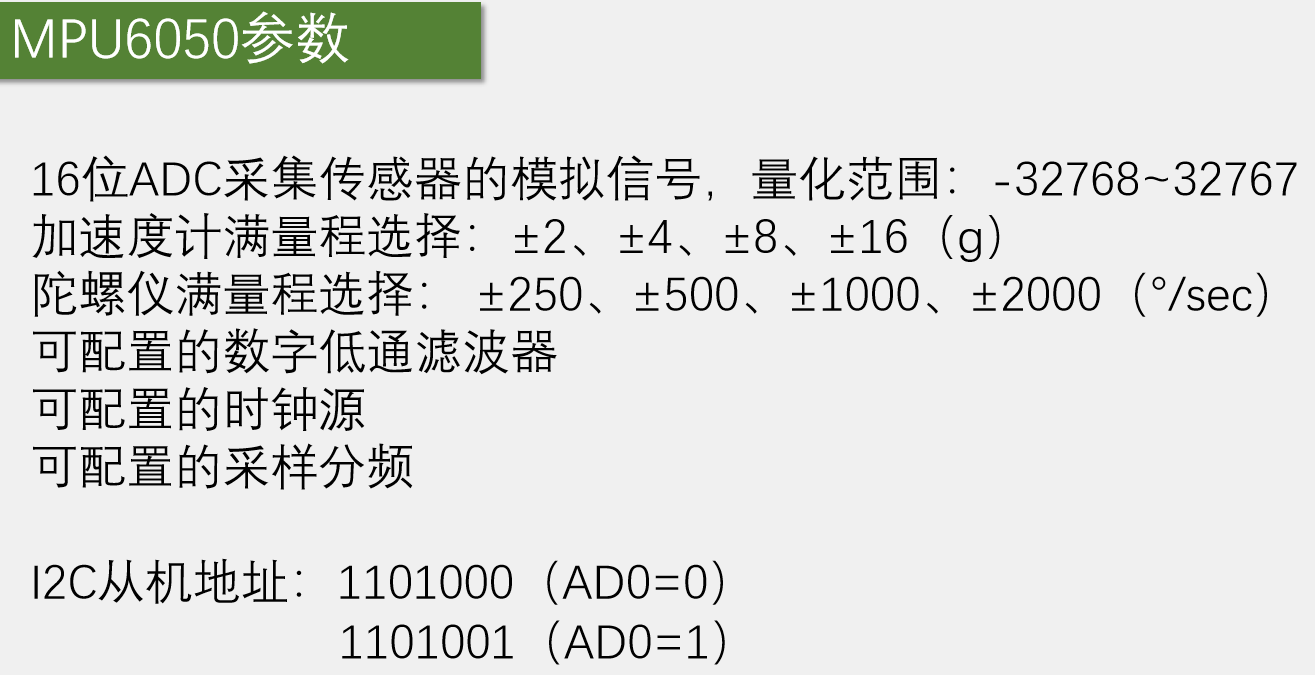
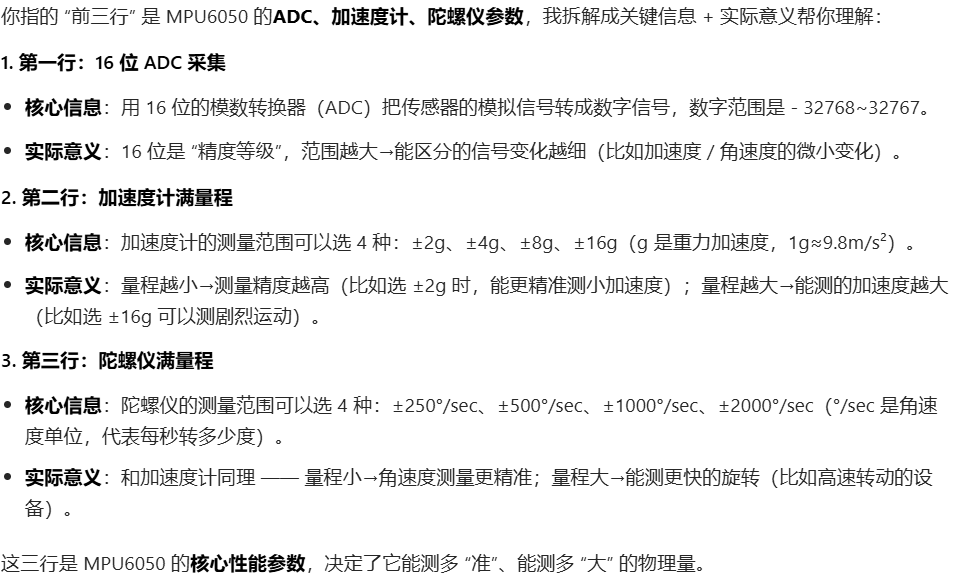
=============mpu6050=====================================================
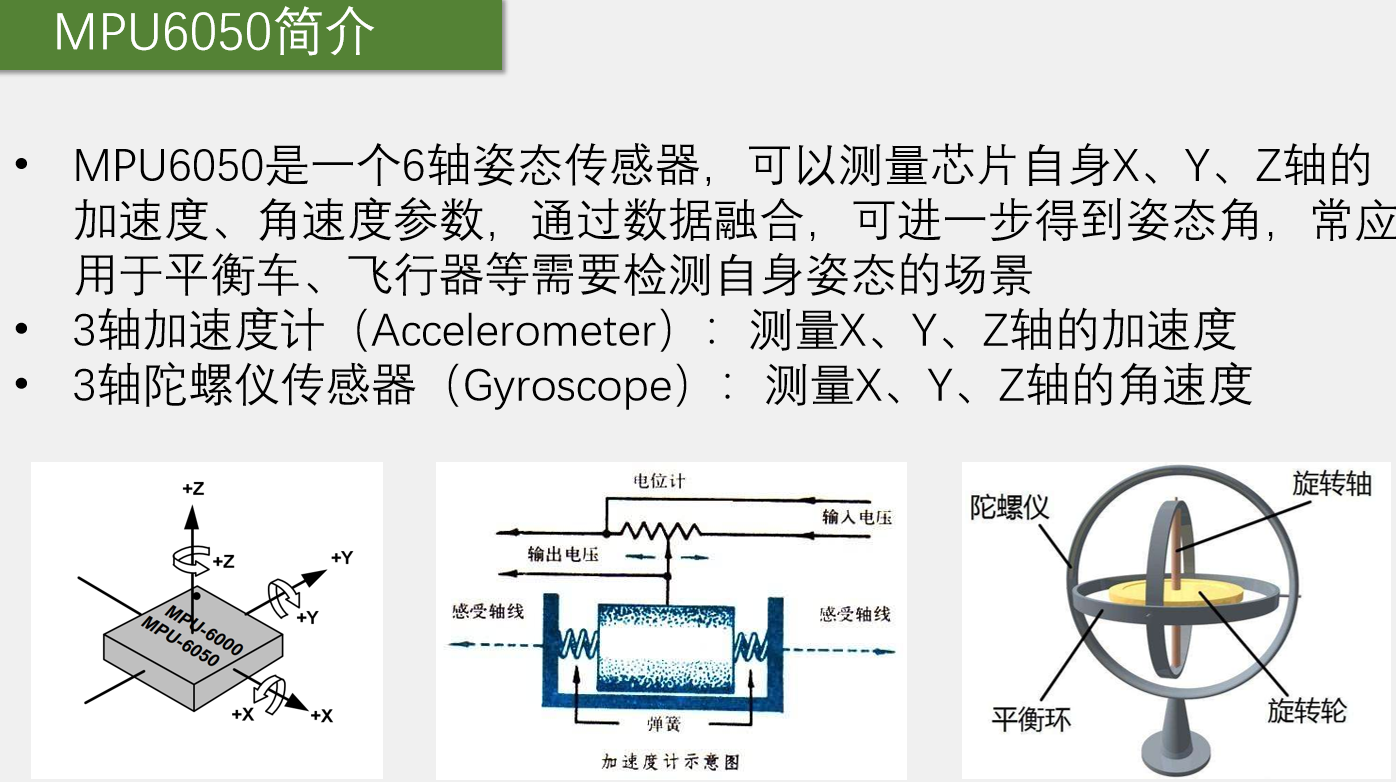
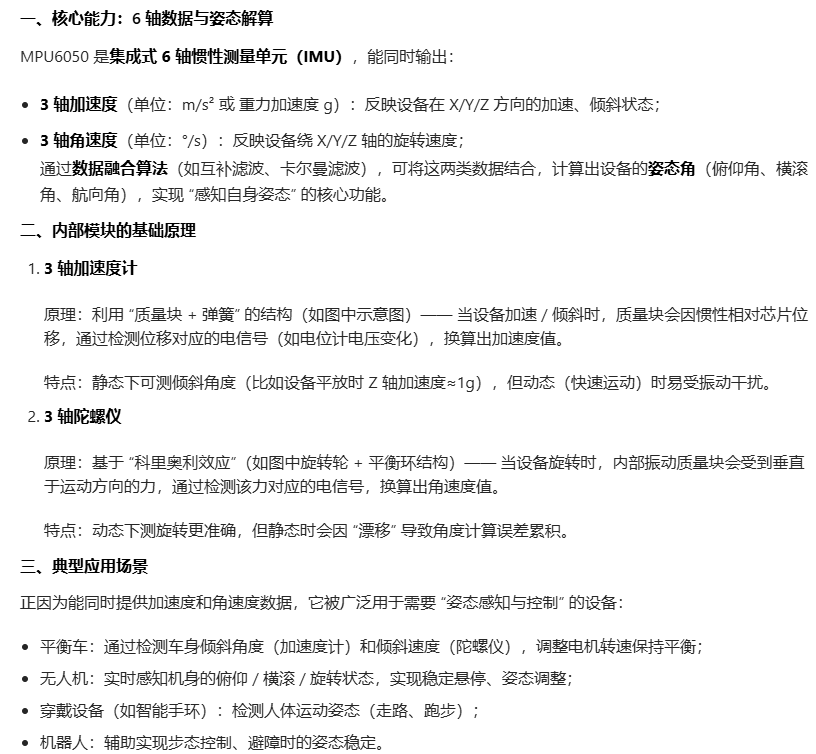
对于三轴加速度计来说是对于静态进行测速的,可以把三轴加速度计想象成 "一个装着小球的透明正方体盒子":这个盒子的上下两面对应 X 轴的正负方向,前后对应 Y 轴,左右对应 Z 轴。当盒子静止不动时,小球会稳稳待在盒子中心;一旦盒子朝某个方向倾斜、加速(比如拿起盒子往上抬),小球就会 "撞" 向对应的盒壁 ------ 通过看小球偏向哪个面,就能知道加速度是沿着 X/Y/Z 哪个轴产生的啦。
三轴陀螺仪传感器:就是你的内部的陀螺仪保持高速的旋转,当你的外部的设备进行偏移的时候,此时你的内部的陀螺仪就会给一个反斥的力,然后就可以得到对应的一个动态的角速度
此时这两者就会相互的补充,一个是动态的一个是静态的
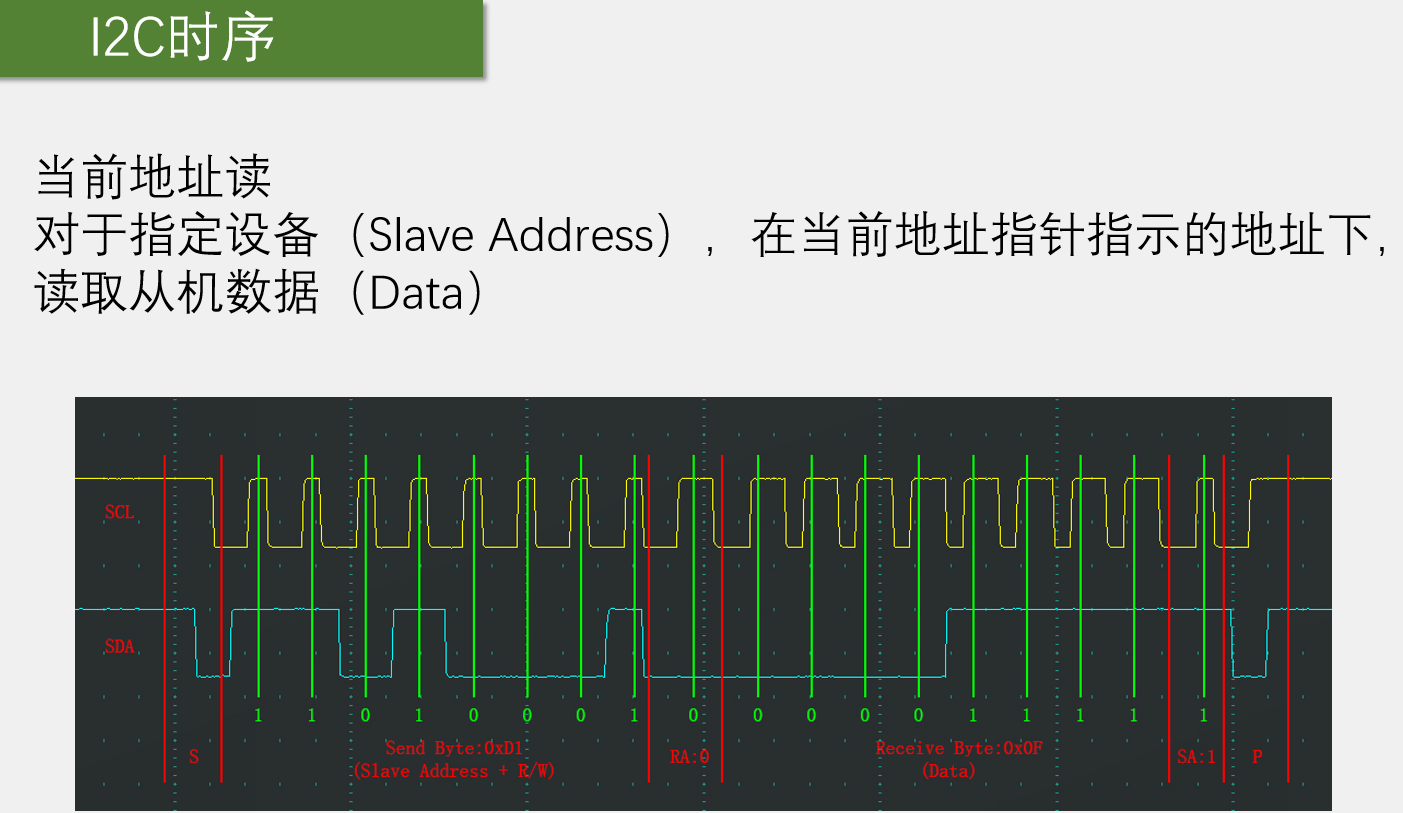
对于从机地址的读写方式,也就是我们电平变化的第一个阶段,通过从机去释放自己的信号,让主机去接收这个过程去考虑的