7七车位立体车库组态王6.53仿真程序3,带急停功能
嘿,各位技术爱好者!今天咱来聊聊7车位立体车库在组态王6.53环境下的仿真程序,特别是其中超关键的急停功能。
一、立体车库背景
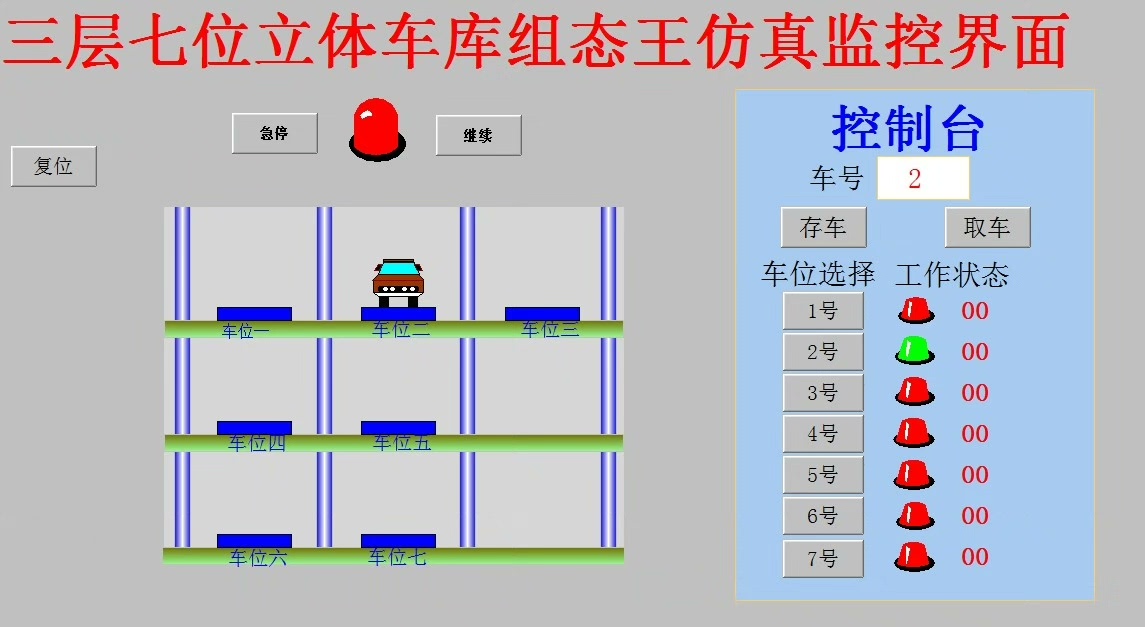
7车位立体车库在现代停车场景中越来越常见,它能有效利用空间,提升停车效率。而利用组态王6.53来做仿真程序,能很好地模拟其运行逻辑,方便调试与优化。
二、组态王6.53基础认知
组态王6.53是一款强大的工业自动化软件,它通过图形化界面构建监控系统,连接各种硬件设备实现数据交互。在立体车库仿真里,它就像大脑,指挥着各个车位的运作。
三、急停功能设计思路
急停功能对于立体车库安全至关重要。一旦触发急停,所有正在运行的动作必须立刻停止,避免可能的设备损坏和人员伤亡。在组态王6.53里,我们通过关联变量和逻辑判断来实现这一功能。
四、代码示例及分析
下面咱看看关键代码片段(这里以简单的命令语言示例,实际情况可能会因具体组态设置有所不同):
c
// 假设定义了一个急停按钮变量名为 "StopButton",为BOOL类型
// 以及各个车位动作控制变量,例如上升动作变量 "UpAction1" 到 "UpAction7",下降动作变量 "DownAction1" 到 "DownAction7" 等
if (StopButton == 1) {
// 停止所有车位的上升动作
for (int i = 1; i <= 7; i++) {
// 这里通过字符串拼接动态获取变量名,以操作不同车位变量
char varName[20];
sprintf(varName, "UpAction%d", i);
SetTagBit(varName, 0);
}
// 停止所有车位的下降动作
for (int i = 1; i <= 7; i++) {
char varName[20];
sprintf(varName, "DownAction%d", i);
SetTagBit(varName, 0);
}
// 其他类似动作,如平移动作等也需同样处理
// 例如平移动作变量 "MoveAction1" 到 "MoveAction7"
for (int i = 1; i <= 7; i++) {
char varName[20];
sprintf(varName, "MoveAction%d", i);
SetTagBit(varName, 0);
}
}代码分析
- 条件判断 :通过判断急停按钮变量
StopButton是否为1(即按钮是否被按下),如果按下则执行后续停止动作的代码块。 - 循环停止上升动作 :使用
for循环遍历1到7车位,通过sprintf函数动态生成每个车位上升动作变量的名称,然后利用SetTagBit函数将这些变量值设为0,从而停止上升动作。 - 循环停止下降动作:同理,对下降动作变量做相同处理,确保所有车位下降动作立刻停止。
- 处理其他动作:对于像平移等其他动作,也是按照类似方式停止,保证整个车库的所有运行动作瞬间终止。
五、总结
急停功能是7车位立体车库安全运行的重要保障。通过在组态王6.53仿真程序中合理编写代码实现这一功能,能为实际立体车库的安全运行提供有效的预演和保障。希望今天分享的内容对大家理解立体车库仿真及急停功能有所帮助,欢迎一起交流探讨!