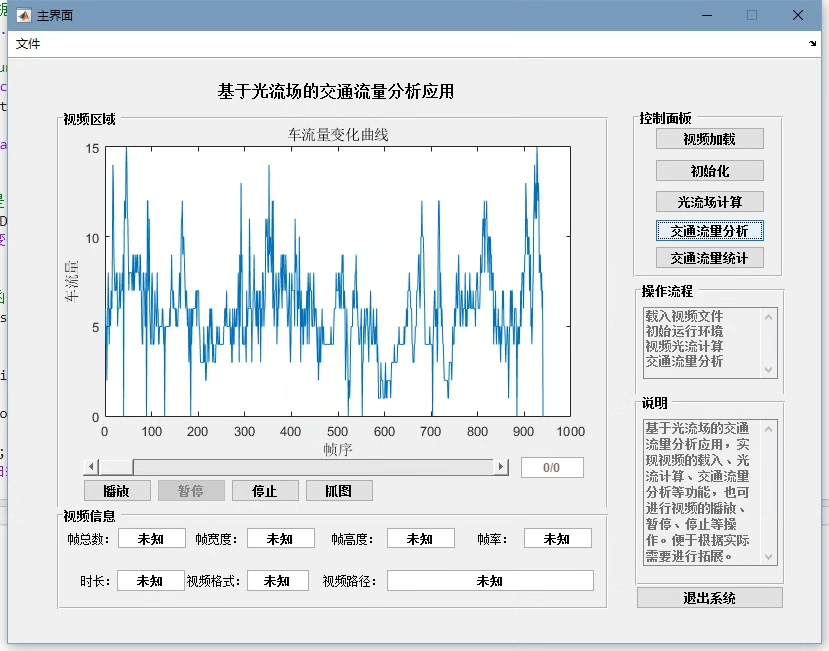
Matlab 基于光流场的交通流量分析与应用 基于光流场的运动目标检测 光流法 HS光流法 Matlab程序 可以检测任意车流/人流视频 可以检测任何运动目标视频
在智能交通系统不断发展的当下,准确分析交通流量至关重要。基于光流场的方法为交通流量分析以及运动目标检测提供了一种强大的手段。今天就来和大家聊聊这其中的门道,以及如何用 Matlab 实现相关功能。
基于光流场的运动目标检测原理
光流,简单理解就是图像中物体运动形成的"光的流动"。它反映了物体在图像中的运动信息。基于光流场的运动目标检测,就是通过分析图像序列中像素点的光流信息,来确定哪些像素点属于运动目标。
光流法
光流法的核心假设是:图像中物体的亮度在短时间内保持不变。基于这个假设,可以推导出光流的基本方程。
以二维图像为例,设图像在时间 t 的亮度为 I(x, y, t),经过微小时间间隔 \\Delta t 后,该点移动到 (x + \\Delta x, y + \\Delta y),亮度为 I(x + \\Delta x, y + \\Delta y, t + \\Delta t)。根据亮度不变假设可得:
\I(x, y, t) = I(x + \\Delta x, y + \\Delta y, t + \\Delta t)\\
将右边进行泰勒展开并忽略高阶无穷小,得到:
\I(x, y, t) = I(x, y, t) + \\frac{\\partial I}{\\partial x}\\Delta x + \\frac{\\partial I}{\\partial y}\\Delta y + \\frac{\\partial I}{\\partial t}\\Delta t\\
两边消去 I(x, y, t) 并同时除以 \\Delta t,令 u = \\frac{\\Delta x}{\\Delta t},v = \\frac{\\Delta y}{\\Delta t}(u 和 v 分别为光流在 x 和 y 方向的分量),则有:
\\\frac{\\partial I}{\\partial x}u + \\frac{\\partial I}{\\partial y}v + \\frac{\\partial I}{\\partial t} = 0\\
这就是光流法的基本约束方程。但仅靠这一个方程无法求解出 u 和 v 两个未知数,所以需要引入其他约束条件。
HS 光流法
HS(Horn - Schunck)光流法是一种经典的光流计算方法。它在基本光流约束方程的基础上,引入了光流平滑性假设,即相邻像素点的光流应该相似。
具体实现时,通过构造一个能量函数来求解光流。能量函数 E 由两部分组成:数据项和平滑项。

数据项:\E*d = \\sum*{x,y}(\\frac{\\partial I}{\\partial x}u + \\frac{\\partial I}{\\partial y}v + \\frac{\\partial I}{\\partial t})\^2\\
平滑项:\E*s = \\alpha\^2(\\sum*{x,y}((\\frac{\\partial u}{\\partial x})\^2 + (\\frac{\\partial u}{\\partial y})\^2 + (\\frac{\\partial v}{\\partial x})\^2 + (\\frac{\\partial v}{\\partial y})\^2))\\
总能量函数:\E = E*d + E*s\\
通过最小化这个能量函数,就可以求解出光流 u 和 v。
Matlab 程序实现
下面来看一段简单的基于 HS 光流法的 Matlab 代码示例:
matlab
% 读取视频
videoFileReader = VideoReader('your_video_file.mp4');
numFrames = videoFileReader.NumberOfFrames;
% 初始化光流参数
alpha = 0.012; % 平滑参数
nIter = 10; % 迭代次数
for k = 1:numFrames - 1
% 读取当前帧和下一帧
frame1 = read(videoFileReader, k);
frame2 = read(videoFileReader, k + 1);
% 将帧转换为灰度图
gray1 = rgb2gray(frame1);
gray2 = rgb2gray(frame2);
% 计算图像梯度
[Ix, Iy, It] = computeGradient(gray1, gray2);
% 初始化光流
u = zeros(size(gray1));
v = zeros(size(gray1));
for iter = 1:nIter
% 计算光流的平滑项
ux = imfilter(u, [-0.25 0 0.25], 'conv','replicate');
uy = imfilter(u, [-0.25; 0; 0.25], 'conv','replicate');
vx = imfilter(v, [-0.25 0 0.25], 'conv','replicate');
vy = imfilter(v, [-0.25; 0; 0.25], 'conv','replicate');
% 更新光流
denominator = Ix.^2 + Iy.^2 + alpha^2 * (ux.^2 + uy.^2 + vx.^2 + vy.^2);
u = (Iy.^2 * u - Ix.* Iy.* v - Ix.* It)./ denominator;
v = (-Ix.* Iy.* u + Ix.^2 * v - Iy.* It)./ denominator;
end
% 这里可以根据光流结果进行运动目标检测相关操作,比如设定阈值筛选明显运动的区域
% 简单可视化光流
figure;
imagesc(frame1);
hold on;
[X, Y] = meshgrid(1:size(u, 2), 1:size(u, 1));
quiver(X, Y, u, v, 'r');
hold off;
end
function [Ix, Iy, It] = computeGradient(im1, im2)
% 使用高斯滤波器平滑图像
im1 = imgaussfilt(im1, 1.5);
im2 = imgaussfilt(im2, 1.5);
% 计算x和y方向的梯度
Ix = imfilter(im1, [-0.25 0 0.25], 'conv','replicate');
Iy = imfilter(im1, [-0.25; 0; 0.25], 'conv','replicate');
% 计算时间方向的梯度
It = im2 - im1;
end代码分析
-
视频读取部分 :
matlab
videoFileReader = VideoReader('yourvideofile.mp4');
numFrames = videoFileReader.NumberOfFrames;这里使用 Matlab 的
VideoReader函数读取视频文件,并获取视频的总帧数。这样我们后续就可以逐帧处理视频。 -
光流参数初始化 :
matlab
alpha = 0.012; % 平滑参数
nIter = 10; % 迭代次数alpha是 HS 光流法中控制平滑程度的参数,数值越小,光流越平滑,但可能会丢失一些细节。nIter是迭代次数,用于求解光流时的迭代优化。 -
帧处理循环 :
`matlab
for k = 1:numFrames - 1
% 读取当前帧和下一帧
frame1 = read(videoFileReader, k);
frame2 = read(videoFileReader, k + 1);
% 将帧转换为灰度图
gray1 = rgb2gray(frame1);
gray2 = rgb2gray(frame2);
`
这个循环逐帧读取视频,每次读取两帧(当前帧和下一帧),并将它们转换为灰度图。因为光流计算一般在灰度图上进行,这样可以简化计算且不影响运动信息提取。
- 梯度计算函数 :
`matlab
function Ix, Iy, It = computeGradient(im1, im2)
% 使用高斯滤波器平滑图像
im1 = imgaussfilt(im1, 1.5);
im2 = imgaussfilt(im2, 1.5);
% 计算x和y方向的梯度
Ix = imfilter(im1, -0.25 0 0.25, 'conv','replicate');
Iy = imfilter(im1, -0.25; 0; 0.25, 'conv','replicate');
% 计算时间方向的梯度
It = im2 - im1;
end
`
首先使用 imgaussfilt 函数对图像进行高斯平滑,减少噪声影响。然后通过 imfilter 函数使用 Sobel 算子类似的模板计算图像在 x 和 y 方向的梯度。时间方向的梯度则直接通过两帧相减得到。
- 光流计算与更新 :
`matlab
for iter = 1:nIter
% 计算光流的平滑项
ux = imfilter(u, -0.25 0 0.25, 'conv','replicate');
uy = imfilter(u, -0.25; 0; 0.25, 'conv','replicate');
vx = imfilter(v, -0.25 0 0.25, 'conv','replicate');
vy = imfilter(v, -0.25; 0; 0.25, 'conv','replicate');
% 更新光流
denominator = Ix.^2 + Iy.^2 + alpha^2 * (ux.^2 + uy.^2 + vx.^2 + vy.^2);
u = (Iy.^2 u - Ix. Iy.v - Ix. It)./ denominator;
v = (-Ix.Iy. u + Ix.^2 v - Iy. It)./ denominator;
end
`

在每次迭代中,先计算光流的平滑项(u 和 v 在 x 和 y 方向的梯度)。然后根据 HS 光流法的能量函数最小化公式,更新光流 u 和 v。
-
可视化部分 :
matlab
figure;
imagesc(frame1);
hold on;
[X, Y] = meshgrid(1:size(u, 2), 1:size(u, 1));
quiver(X, Y, u, v, 'r');
hold off;这里简单地将当前帧图像显示出来,并通过
quiver函数绘制光流向量,红色箭头表示光流方向和大小,方便直观观察光流情况。
通过这样的代码,我们就可以基于 HS 光流法对视频中的运动目标进行分析,无论是车流还是人流视频,亦或是其他任何运动目标视频,都能适用。基于光流场的交通流量分析为我们进一步实现智能交通管理等应用提供了坚实的基础。
希望今天分享的内容能让大家对基于光流场的交通流量分析及 Matlab 实现有更深入的理解,一起在智能交通领域探索更多可能!