L4无人车自动驾驶系统方案 系统方案设计,150多页系统方案 方案文档,没有配套代码
最近深入研究了一份足足 150 多页的 L4 无人车自动驾驶系统方案文档,虽然没有配套代码,但这并不影响它本身蕴含的巨大价值,就像一座建筑的设计蓝图,即便还未开始施工(编写代码),也能让我们对最终的建筑(自动驾驶系统)有一个全面的认识。
系统方案设计的架构之美
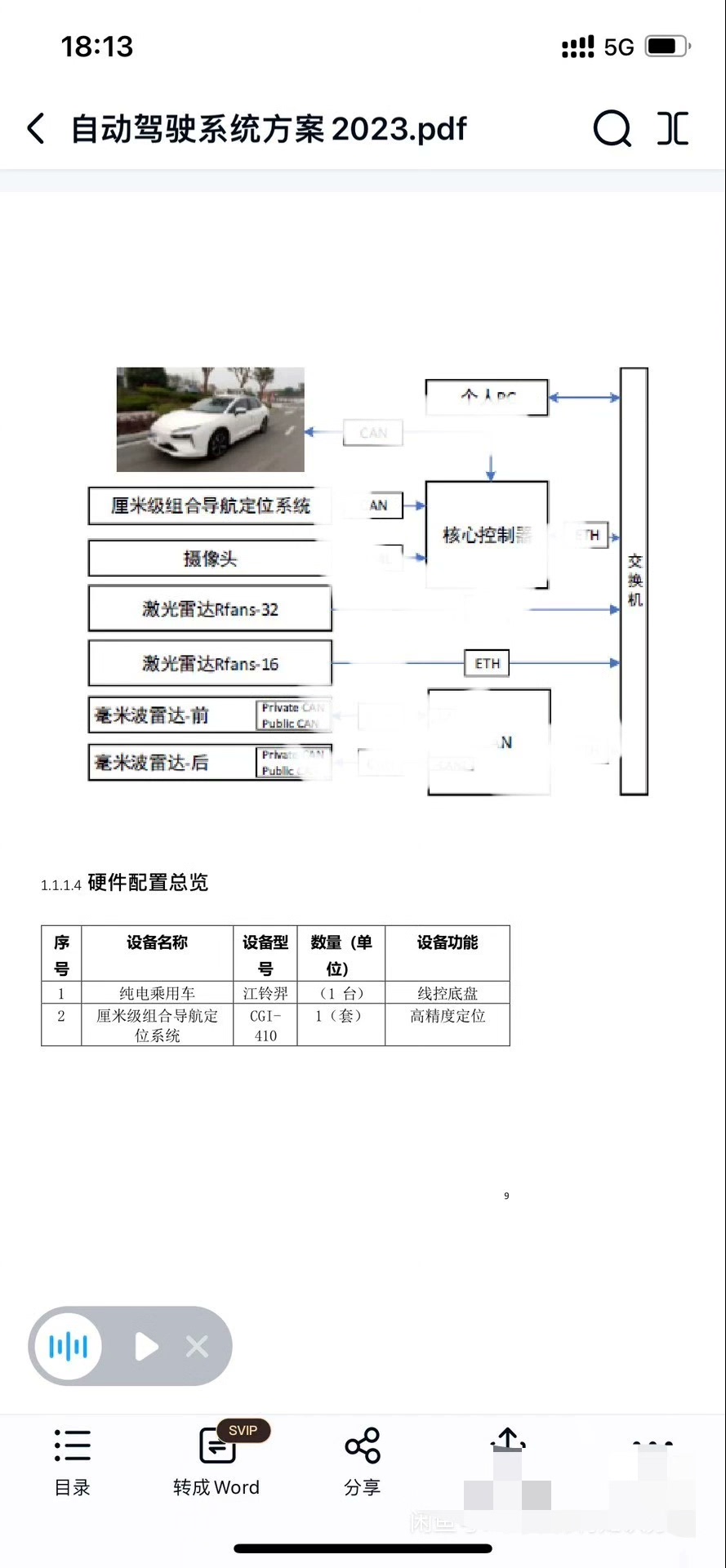
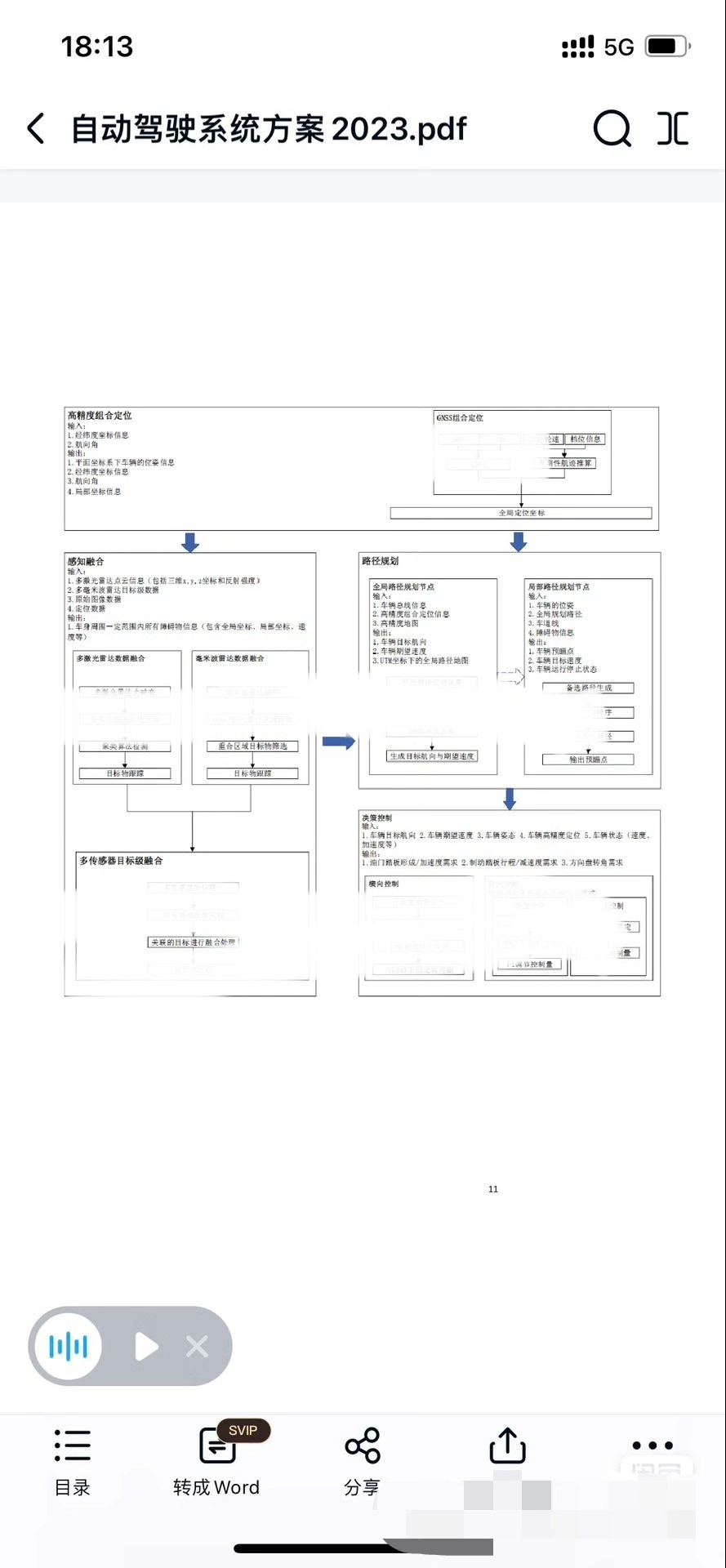
从这份方案中可以看出,L4 无人车自动驾驶系统是一个极为复杂且精妙的架构。它大致分为感知层、决策层和执行层。
感知层
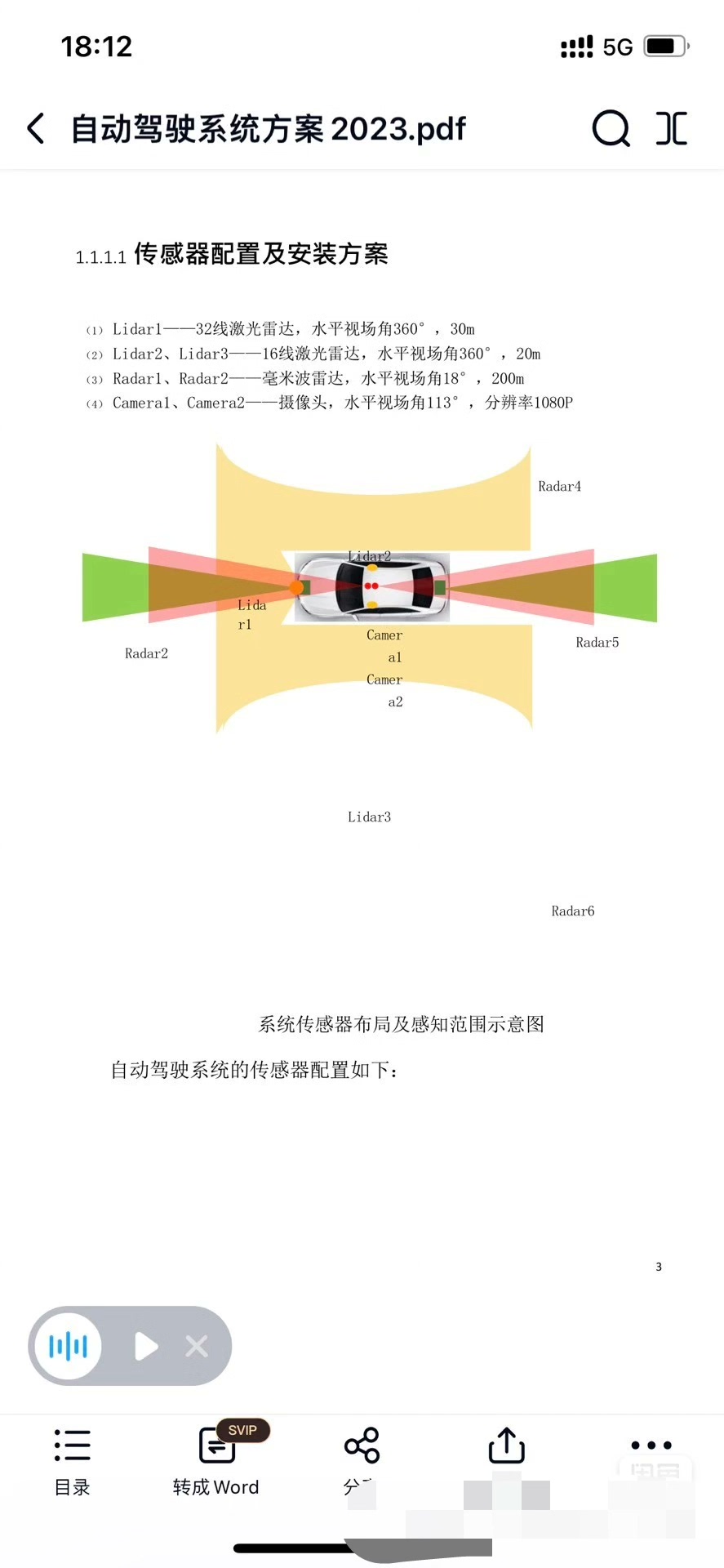
感知层是无人车的"眼睛"和"耳朵",负责收集车辆周围环境的信息。在方案里,详细规划了各种传感器的布局与协同工作方式。比如,激光雷达能实时绘制周围环境的三维点云图,毫米波雷达则用于精准测量目标物体的距离、速度和角度。
python
# 假设我们用 Python 模拟激光雷达数据接收
import numpy as np
# 模拟激光雷达返回的点云数据,这里简单生成 100 个点,每个点包含 x, y, z 坐标
point_cloud = np.random.rand(100, 3)
print(point_cloud)上述代码简单模拟了激光雷达返回的点云数据,实际中激光雷达数据会更复杂且精准。在实际系统里,这些传感器数据需要经过复杂的滤波、校准等预处理操作,才能为后续决策提供可靠依据。
决策层
决策层如同无人车的"大脑",依据感知层传来的信息,做出行驶决策。方案中对各种场景下的决策逻辑进行了细致梳理,从简单的直道行驶到复杂的交叉路口通行,都有相应策略。这部分虽无代码,但我们可以用伪代码来简单描述其核心逻辑。
text
if 前方障碍物距离 < 安全距离:
if 左侧车道可通行 and 左侧无障碍物:
执行向左变道操作
elif 右侧车道可通行 and 右侧无障碍物:
执行向右变道操作
else:
执行刹车操作
else:
保持当前行驶状态这段伪代码体现了一种基本的避障决策逻辑。在实际的 L4 系统中,决策层需要考虑更多因素,像交通规则、车辆动力学限制等,决策逻辑会复杂得多。
执行层
执行层就是无人车的"手脚",负责将决策层的指令转化为实际的车辆动作,如加速、减速、转向等。方案对车辆的底盘控制、转向系统等执行机构的控制接口和参数进行了规定。
c
// 假设这是一段控制车辆转向的 C 语言代码示例
#include <stdio.h>
void steer(float angle) {
// 这里省略实际与车辆硬件交互的底层代码
printf("Turning the vehicle with angle: %f\n", angle);
}
int main() {
float desired_angle = 10.0;
steer(desired_angle);
return 0;
}这段代码模拟了控制车辆转向的函数,实际中会通过特定的总线协议与车辆硬件进行通信,实现精确的转向控制。
无代码方案的意义与局限
这份没有配套代码的方案文档,意义非凡。它为整个项目确定了清晰的方向,让不同领域的人员,无论是硬件工程师、算法工程师还是测试人员,都能在同一个框架下理解系统。然而,它的局限性也很明显,没有代码就难以直观验证方案的可行性,一些细节上的逻辑错误或性能问题可能难以发现。
总的来说,这份 150 多页的 L4 无人车自动驾驶系统方案,是迈向实际自动驾驶系统的重要一步,虽然缺少代码,但却为后续的代码实现勾勒出了宏伟蓝图,值得我们深入研究并以此为基础去实现真正的无人车自动驾驶。