单相逆变器matlab仿真(TCM模式和CCM模式) 输入400v输出220,L=200uH,C=20uF,P=500w TCM模式: 全周期内实现zvs软开关,负电流控制外环采用pr控制,消除电压静差。 CCM模式: 外环pr控制,内环pi控制
最近在研究单相逆变器的不同工作模式,这里就跟大家分享下我用Matlab进行单相逆变器在TCM模式和CCM模式下的仿真过程。
仿真基础参数
首先,我们得明确这次仿真的基础参数。输入电压为400V,输出电压要求达到220V,电感L的值是200μH,电容C为20μF,负载功率P为500W。
TCM模式仿真
TCM模式简介
TCM(临界导电模式)的一大优势就是能在全周期内实现ZVS(零电压开关)软开关,这样可以有效降低开关损耗。在负电流控制外环,我们采用PR(比例 - 谐振)控制,其目的是消除电压静差。
Matlab代码实现与分析
matlab
% 基础参数设置
Vin = 400; % 输入电压 400V
Vout = 220; % 输出电压 220V
L = 200e-6; % 电感 200uH
C = 20e-6; % 电容 20uF
P = 500; % 负载功率 500W
% PR控制器参数
Kp = 1; % 比例系数
Kr = 10; % 谐振系数
w0 = 2*pi*50; % 基波角频率
% 仿真时间设置
t_start = 0;
t_end = 0.1;
t_step = 1e-6;
% 仿真模型搭建(这里简化示意)
t = t_start:t_step:t_end;
v_out = zeros(size(t));
i_l = zeros(size(t));
for n = 2:length(t)
% 这里是TCM模式下的控制逻辑,模拟PR控制
error = Vout - v_out(n-1);
control_signal = Kp * error + Kr * (error - error_prev) / (w0 * t_step);
% 根据控制信号更新电感电流和输出电压
% 这里简化了电路动态方程的求解
di_l = (Vin - v_out(n-1)) / L * t_step;
i_l(n) = i_l(n-1) + di_l;
dv_out = (i_l(n) - P / v_out(n-1)) / C * t_step;
v_out(n) = v_out(n-1) + dv_out;
error_prev = error;
end
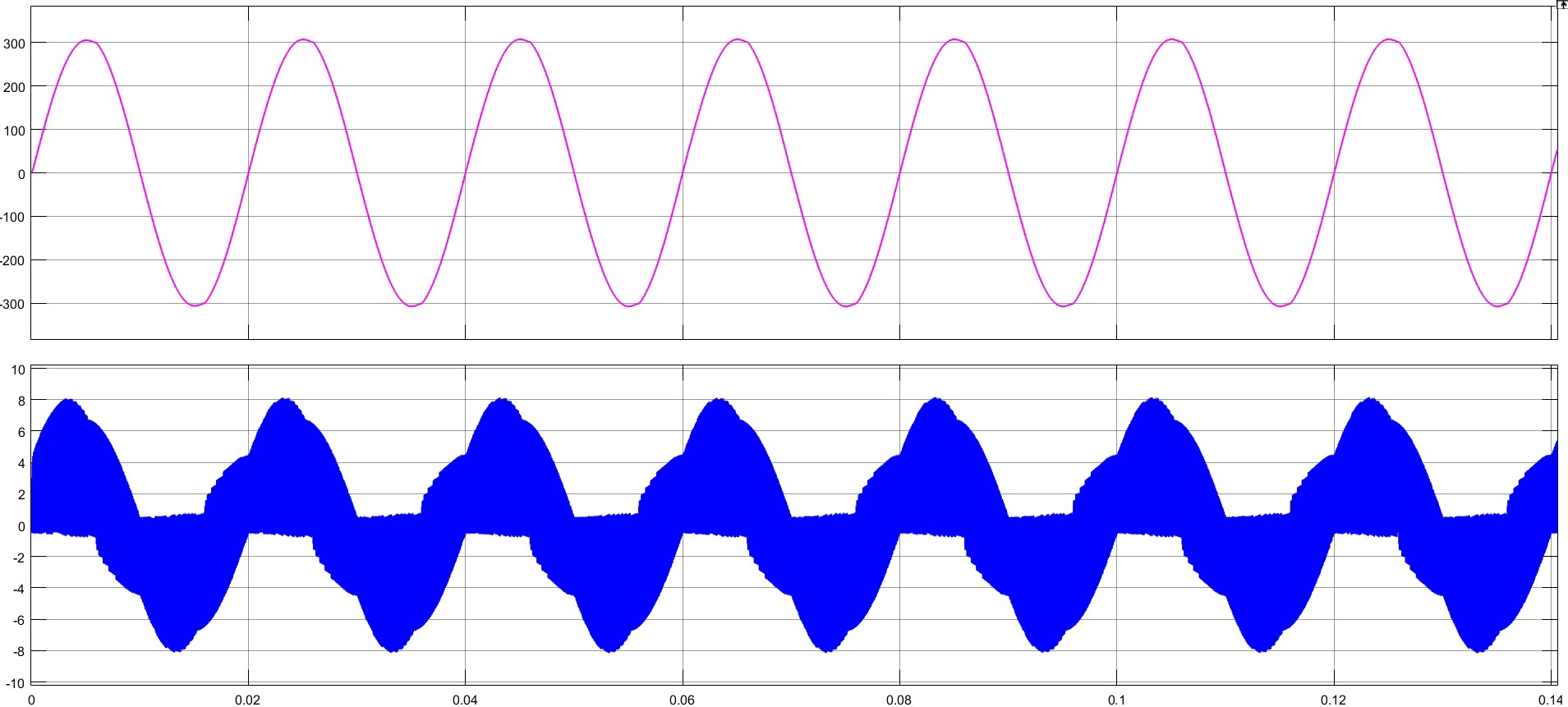
% 绘制输出电压波形
figure;
plot(t, v_out);
xlabel('时间 (s)');
ylabel('输出电压 (V)');
title('TCM模式下单相逆变器输出电压');代码分析:
- 开头我们设置了基础参数,这些参数是整个仿真的基石。
- PR控制器的参数
Kp和Kr分别代表比例系数和谐振系数,w0是基波角频率,这几个参数共同决定了PR控制器的性能。 - 在仿真循环里,我们模拟了PR控制的过程,通过计算误差并根据PR控制器的公式得到控制信号。然后根据电路的动态方程更新电感电流和输出电压。
- 最后绘制输出电压的波形,这样我们就能直观地看到TCM模式下逆变器的输出情况。
CCM模式仿真
CCM模式简介
CCM(连续导电模式)下,我们采用外环PR控制和内环PI(比例 - 积分)控制。外环PR控制主要负责输出电压的调节,内环PI控制则用于电感电流的控制。
Matlab代码实现与分析
matlab
% 基础参数与TCM模式相同,这里不再重复设置
% PR控制器参数(外环)
Kp_pr = 1;
Kr_pr = 10;
w0 = 2*pi*50;
% PI控制器参数(内环)
Kp_pi = 0.5;
Ki_pi = 1;
% 仿真时间设置
t_start = 0;
t_end = 0.1;
t_step = 1e-6;
% 仿真模型搭建(简化示意)
t = t_start:t_step:t_end;
v_out = zeros(size(t));
i_l = zeros(size(t));
integral_error = 0;
for n = 2:length(t)
% 外环PR控制
error_pr = Vout - v_out(n-1);
control_signal_pr = Kp_pr * error_pr + Kr_pr * (error_pr - error_pr_prev) / (w0 * t_step);
% 内环PI控制
error_pi = control_signal_pr - i_l(n-1);
integral_error = integral_error + error_pi * t_step;
control_signal_pi = Kp_pi * error_pi + Ki_pi * integral_error;
% 根据控制信号更新电感电流和输出电压
di_l = (Vin - v_out(n-1)) / L * t_step;
i_l(n) = i_l(n-1) + di_l;
dv_out = (i_l(n) - P / v_out(n-1)) / C * t_step;
v_out(n) = v_out(n-1) + dv_out;
error_pr_prev = error_pr;
end
% 绘制输出电压波形
figure;
plot(t, v_out);
xlabel('时间 (s)');
ylabel('输出电压 (V)');
title('CCM模式下单相逆变器输出电压');代码分析:
- 同样,我们先设置了基础参数,接着定义了PR控制器和PI控制器的参数。
- 在仿真循环中,先进行外环的PR控制,计算电压误差并得到控制信号。然后进行内环的PI控制,计算电流误差并积分,得到最终的控制信号。
- 最后根据控制信号更新电感电流和输出电压,并绘制输出电压波形。
通过以上的Matlab仿真,我们可以对比TCM模式和CCM模式下单相逆变器的输出特性,为实际的逆变器设计提供参考。希望这篇分享能对大家有所帮助!