逆变器下垂控制,负载跳变实验,有功无功可控,电压电流波形质量好,有意抓紧下手吧!由于是仿真文件是2022b版本的,如果你电脑里是其他版本的,可联系我降版本! 附赠相关文献!
嘿,各位技术小伙伴们!今天咱来唠唠逆变器下垂控制,这里面可是藏着不少有意思的玩意儿。
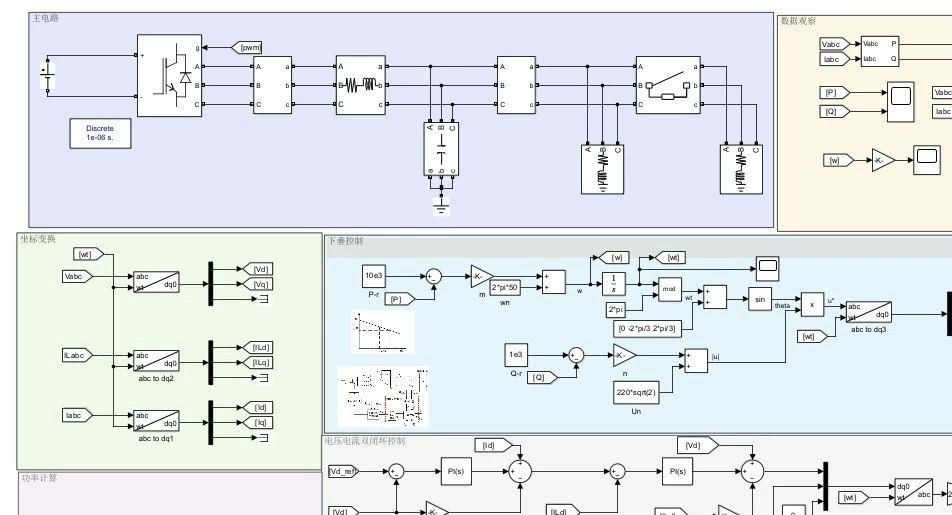
咱先来说说这个下垂控制,它在逆变器的运行中起到关键作用,能够实现有功无功的可控调节。想象一下,就好像给逆变器安上了一双灵活的手,可以精准地把控有功和无功功率的输出。为啥这有功无功可控这么重要呢?简单讲,它能让逆变器更好地适应不同的用电场景,保证电能的稳定供应。
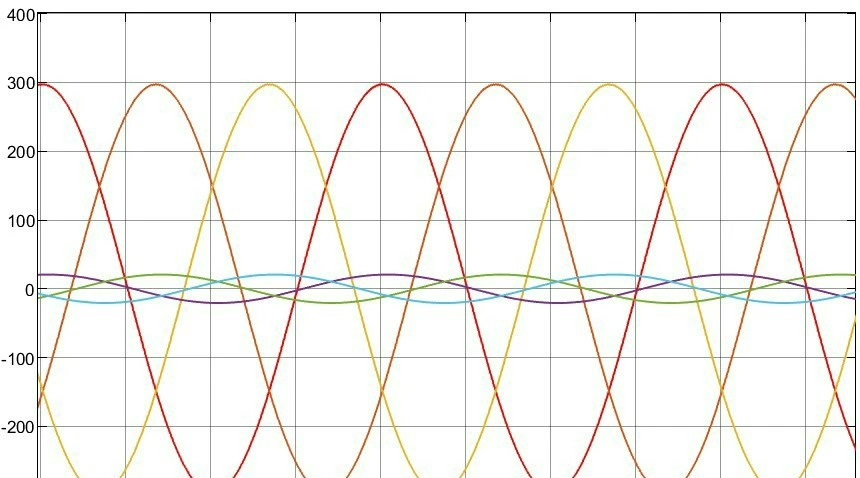
为了验证这个下垂控制的效果,我们做了负载跳变实验。在这个实验里,负载突然变化,就像用电设备一下子增多或者减少,这对逆变器可是个不小的考验。但结果让人惊喜,不仅有功无功控制得稳稳当当,输出的电压电流波形质量也是杠杠的好!这意味着啥呢?就是说不管负载怎么折腾,逆变器都能输出高质量的电能,保证用电设备的正常运行。
说到这,咱来点代码瞅瞅。以简单的下垂控制算法为例(以下代码基于MATLAB,为示意代码,实际应用需根据具体情况调整):
matlab
% 定义下垂控制参数
kP = 0.1; % 有功功率下垂系数
kQ = 0.05; % 无功功率下垂系数
% 假设初始的有功和无功功率
P0 = 100; % 初始有功功率
Q0 = 50; % 初始无功功率
% 计算输出电压幅值和频率
delta_f = -kP * (P - P0); % 根据有功功率偏差计算频率变化
delta_V = -kQ * (Q - Q0); % 根据无功功率偏差计算电压幅值变化
% 更新输出频率和电压幅值
f_out = f_nominal + delta_f; % 输出频率
V_out = V_nominal + delta_V; % 输出电压幅值这段代码里,kP 和 kQ 分别是有功和无功功率的下垂系数,它们决定了有功无功变化对频率和电压幅值调整的灵敏度。通过计算有功无功功率与初始值的偏差,得出频率和电压幅值的变化量,进而更新输出的频率和电压幅值。这样,逆变器就能根据负载的变化,实时调整输出,实现有功无功的可控。
这里要注意哈,我提供的仿真文件是2022b版本的。要是你电脑里装的是其他版本,很可能打不开。别担心,你可以联系我,我帮你降版本。而且,我还附赠相关文献哦,里面详细介绍了下垂控制的原理、算法以及各种实验数据,绝对能让你对逆变器下垂控制有更深入的理解。
如果你对这个逆变器下垂控制技术感兴趣,有意研究一番,那就抓紧下手吧!说不定在你的研究下,还能发掘出更多优化的空间呢!