项目分支: v0.7_camera_rtsp
PR 状态: 正在等待官方合并 (PR #149)
📖 简介
在使用 xiaomi-miloco 的过程中,为了增强系统的视觉感知能力和扩展性,我基于 官方v0.1.2 版本基础上开发了一个新的功能分支。
该分支重点实现了 RTSP 协议的全面支持 。这不仅意味着你可以将外部的 IP摄像头接入 Miloco,还能将小米设备摄像头的画面以RTSP服务形式提供出去。目前该功能已提交 PR 给官方,在正式合并前,欢迎有动手能力的开发者拉取我的分支进行测试和交流。
✨ 主要功能特性
1. 支持 RTSP 摄像头接入 (RTSP In)
允许在配置文件中添加外部 RTSP 摄像头源,扩展视觉输入能力。
-
多路支持: 支持配置多个 IP 摄像头。
-
稳定性优化: 增加了针对 RTSP 摄像头的连接心跳检测机制。
2. 小米摄像头 RTSP 服务化 (RTSP Out)
除了接收视频流,我还实现了将小米设备的板载摄像头画面转化为 RTSP Server。
- 实时监控: 你可以使用 VLC 等播放器连接设备的 IP 地址,实时查看摄像头的画面。
3. 跨平台验证
该功能代码已在以下环境中调试通过:
-
Linux (X86 架构)
-
macOS (Apple Silicon M2 / M系列芯片)
⚠️ 已知限制 (Known Issues)
在尝鲜之前,请注意以下技术细节:
-
Web UI 预览限制: 目前在 Miloco 的 Web 界面上查看视频流时,仅支持 H.265 编码格式。H.264 格式的视频流暂时无法在网页端直接播放。
-
AI 功能不受影响: 即使是 H.264 格式,虽然网页看不了视频,但后台的 AI 交互逻辑依然可以正常获取并处理图片帧。这应该属于 Web UI 前端的支持问题,暂时未深入修改前端代码。
🚀 如何尝鲜 (How to Test)
由于该功能尚未合并到官方主分支,你需要克隆我的个人 Fork 仓库并切换到对应分支:
1. 拉取代码
请使用 git 命令拉取 v0.7_camera_rtsp 分支:
Bash
git clone -b v0.7_camera_rtsp https://github.com/huangyajie/xiaomi-miloco.git
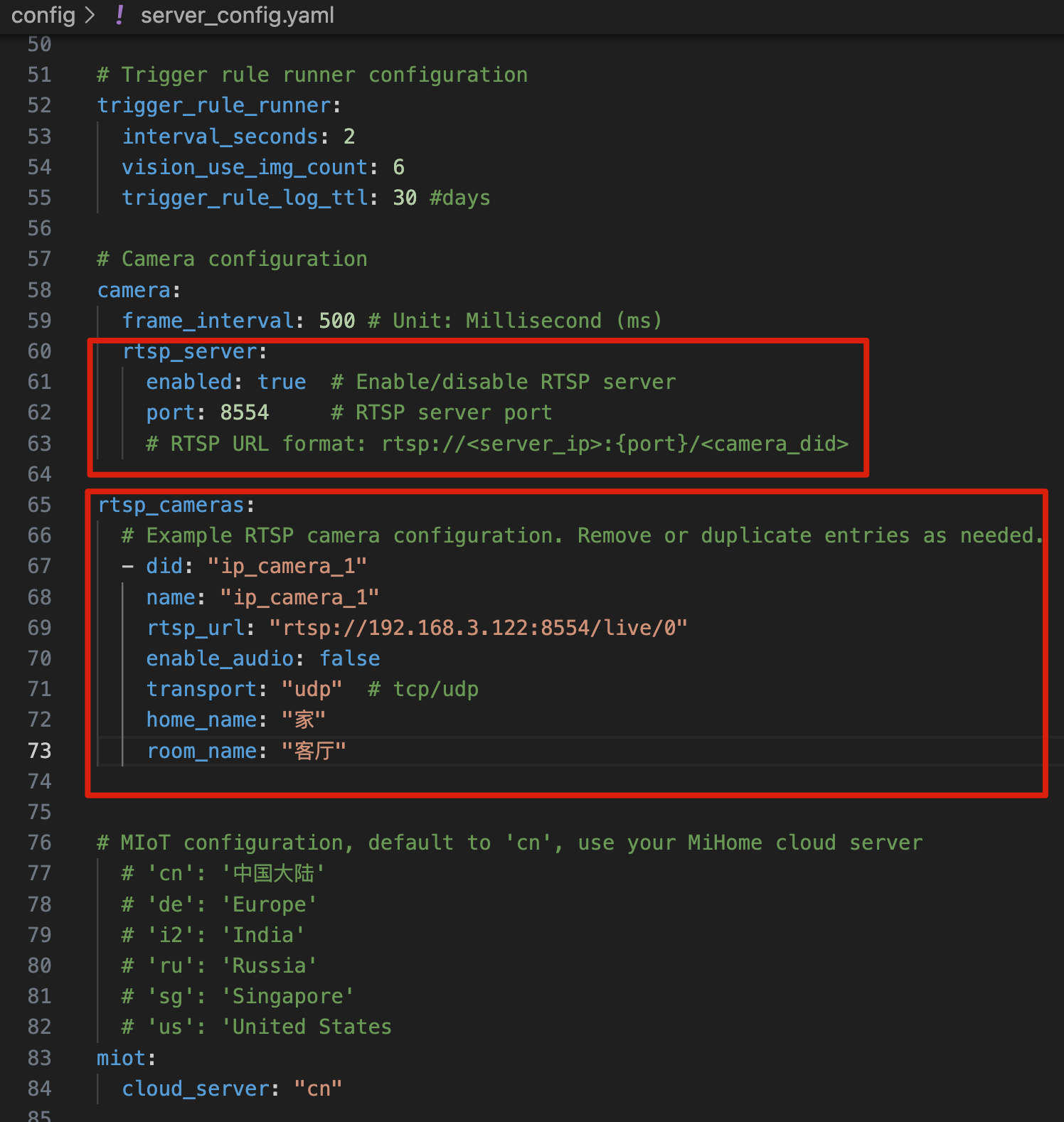
cd xiaomi-miloco2. 修改配置
在 config/server_config.yaml 中配置:
参考:https://github.com/XiaoMi/xiaomi-miloco/pull/149
3. 启动服务
按照官方文档的常规步骤启动服务即可
注:源码方式安装及启动:https://github.com/XiaoMi/xiaomi-miloco/blob/main/docs/development/developer-setup_zh_Hans.md
🤝 反馈与交流
如果你在使用过程中遇到问题,或者有关于代码改进的建议,欢迎在我的 PR 下留言讨论,或者在仓库中提交 Issue。
-
GitHub 分支地址: huangyajie/xiaomi-miloco (v0.7_camera_rtsp)
-
Pull Request 讨论: PR #149