stm32g431 HFI SMO FOC方波高频注入加滑膜观测器无感FOC驱动资料,零速带载启动,低速持续注入,实现无感驱动低速运行,堵转有力,中高速转入滑膜观测器,平滑过渡。 包括完整的cubemx配置文件,mdk工程,原理图和开发笔记,代码全C语言,宏定义选项均有中文注释,方便移植到自己的项目中。
最近在研究电机驱动这块,发现STM32G431实现的无感FOC驱动相当有意思,今天就来跟大家分享一下这个基于HFI SMO(高频注入滑膜观测器)的无感FOC驱动方案。
一、整体方案概述
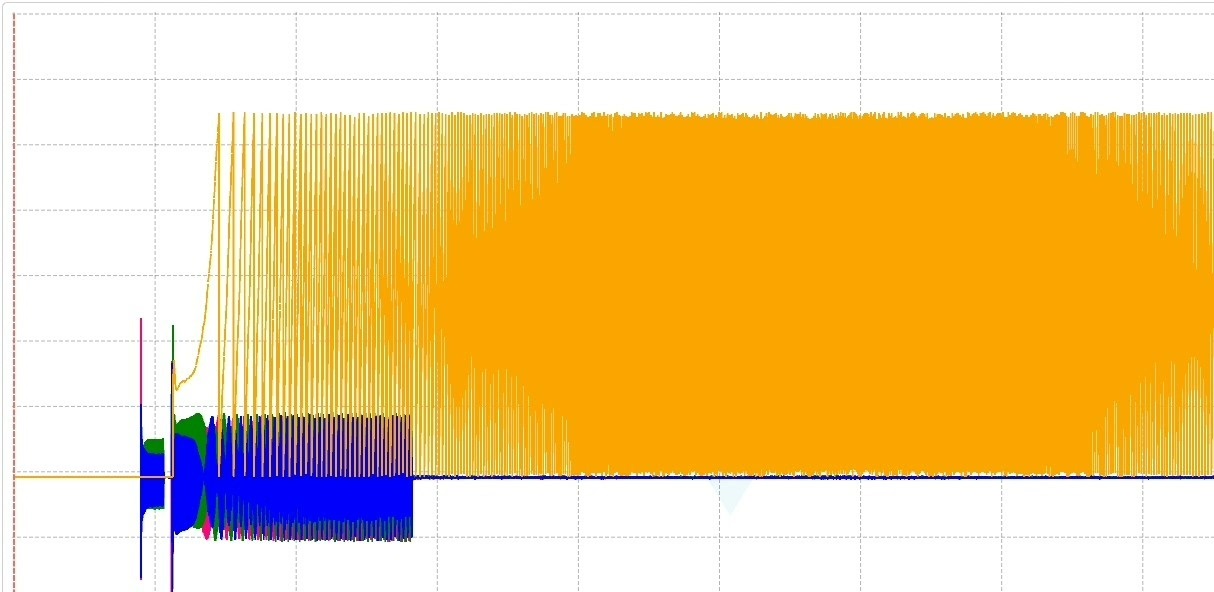
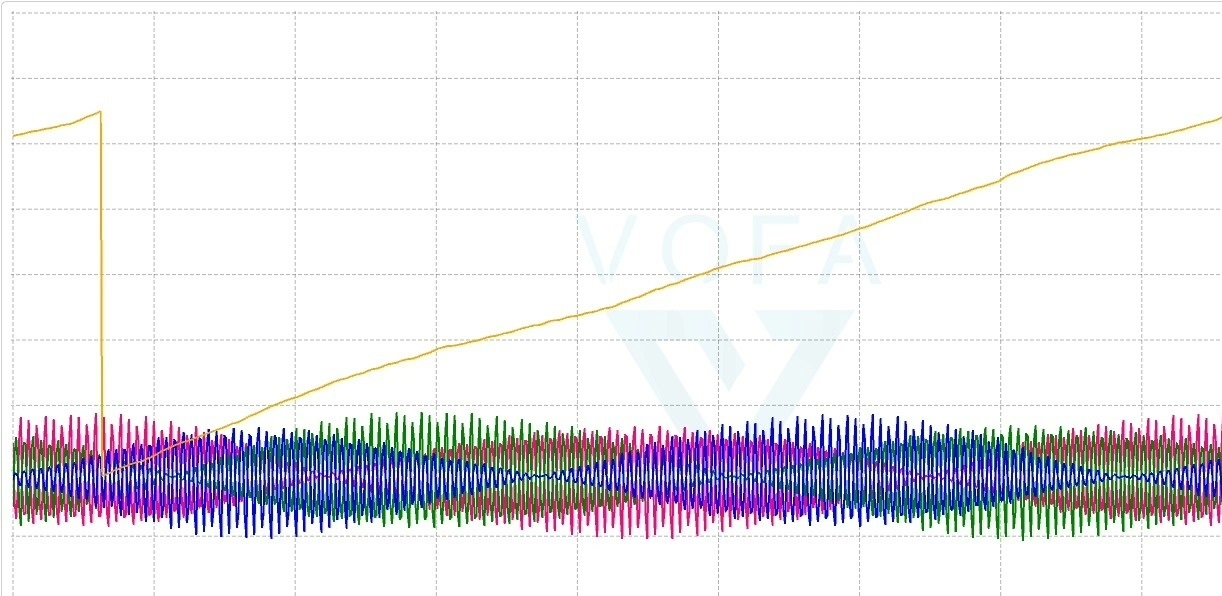
这个方案实现了零速带载启动,在低速的时候持续进行高频方波注入,这样就能实现无感驱动在低速下稳定运行,而且堵转的时候劲儿还挺大。到了中高速阶段,就平滑地转入滑膜观测器进行控制。整个过程的切换很丝滑,电机运行相当稳定。
二、资源说明
这里给大家准备了一整套资料,包括完整的Cubemx配置文件,用这个配置起来STM32G431的各种外设就很方便,就像搭积木一样。还有MDK工程,这就是咱们写代码和编译运行的主阵地啦。原理图也必不可少,能帮我们清晰地了解硬件连接关系。另外还有开发笔记,记录了整个开发过程中的各种要点和心得。
而且代码全部是用C语言写的,宏定义选项都加了中文注释,就算你要移植到自己的项目里,也能轻松看懂,移植难度大大降低。
三、代码示例与分析
咱们来看一段简单的初始化代码,比如定时器初始化,这在FOC算法里是很关键的部分,用于产生PWM信号来驱动电机。
c
// 定时器初始化函数
void TIM_Init(void) {
TIM_HandleTypeDef htim;
// 这里是定时器基本配置结构体
TIM_MasterConfigTypeDef sMasterConfig = {0};
TIM_OC_InitTypeDef sConfigOC = {0};
htim.Instance = TIMx; // 这里假设TIMx是你实际使用的定时器
htim.Init.Prescaler = prescaler_value; // 设置预分频器,调整定时器时钟频率
htim.Init.CounterMode = TIM_COUNTERMODE_UP; // 向上计数模式
htim.Init.Period = period_value; // 设置周期,决定PWM频率
htim.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
if (HAL_TIM_PWM_Init(&htim)!= HAL_OK) {
// 初始化失败处理
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim, &sMasterConfig)!= HAL_OK) {
// 主从模式配置失败处理
Error_Handler();
}
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = pulse_value; // 设置占空比初始值
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
if (HAL_TIM_PWM_ConfigChannel(&htim, &sConfigOC, TIM_CHANNEL_x)!= HAL_OK) {
// PWM通道配置失败处理
Error_Handler();
}
// 使能定时器PWM输出
HAL_TIM_PWM_Start(&htim, TIM_CHANNEL_x);
}在这段代码里,首先定义了定时器处理句柄htim,以及主模式配置结构体sMasterConfig和PWM输出比较配置结构体sConfigOC。通过htim.Init里的Prescaler来设置预分频器,这就像一个水龙头的调节阀,控制着定时器时钟的快慢。Period则设定了定时器的周期,直接决定了我们最终产生的PWM信号频率。
后面配置主从模式和PWM输出通道,sConfigOC.Pulse这里设置的就是PWM的占空比啦,通过调整这个值就能控制电机的转速。最后通过HALTIMPWM_Start函数启动PWM输出,电机就开始按照我们设定的节奏动起来咯。
四、总结
基于STM32G431的这种HFI SMO FOC方波高频注入加滑膜观测器无感FOC驱动方案,在电机的无感驱动控制上有着出色的表现。无论是从启动性能,还是高低速切换的平滑度,都能满足很多实际项目的需求。再加上这一套完整且易懂的资料,相信大家在自己的项目中使用起来也会很顺手。希望这篇博文能给正在研究电机驱动的小伙伴们一些启发,一起探索更多好玩的电机控制玩法。