前言
之前本博客内解读过实时分块(RTC)技术『详见此文《实时动作分块RTC------为解决高延迟,让π0.5也可以点燃火柴、插入网线:执行当前动作分块时生成下一个分块,且已执行的冻结 未执行的则通过"图像修复"做补全》』,其通过异步预测动作块,并借助推理时图像修复对已执行动作进行调节,使VLA能够生成流畅、响应迅速的机器人运动轨迹
然而这种修复方法会引入增加推理延迟的计算开销
- PI因此再次提出一种简洁替代方案:在训练时模拟推理延迟,直接对动作前缀进行调节,从而消除所有推理时开销
该方法无需修改模型架构或机器人运行时系统,仅需增加数行代码即可实现 - 至于实际效果上
一方面,模拟实验表明,在较高推理延迟场景下,训练时实时分块(training-time RTC)性能优于推理时实时计算(inference-time RTC)
二方面,通过π0.6版VLA模型在箱体构建与浓缩咖啡制作任务中的实体实验证明:训练时实时分块在保持任务性能与执行速度的同时,计算成本显著低于推理时实时计算
第一部分
1.1 引言、相关工作、预备知识
1.1.1 引言
如原论文所述,与聊天机器人或搜索引擎不同,具身智能体必须在实时环境中运作。智能体行为与环境之间的反馈循环要求其具备即时响应能力------如同人类运动员,当外部环境变化时,智能体无法简单地'停滞思考'
然而,前沿模型规模持续扩大使得这一要求愈发难以满足。这在机器人学习领域体现得尤为明显:由数十亿参数组成的VLA正日益广泛地应用于高频机器人控制,以完成精密操作任务。当模型推理延迟达到数十至数百毫秒时,生成流畅且响应灵敏的运动轨迹是一项巨大挑战
实时分块处理技术(RTC;5)通过融合动作分块9, 27、流匹配13和推理时动作修复18, 21,为解决该问题提供了有效途径
- 在实时分块(RTC)技术中,动作区块以异步方式被预测------当前区块仍在执行时,下一个区块已开始生成
为确保区块间的连续性,每个生成过程均以先前预测动作的冻结前缀作为调节条件,填补剩余部分 - 然而,RTC采用的推理时图像修复方法会引入额外计算开销------进而导致延迟------这在某种程度上违背了实时执行框架的设计初衷
实证研究表明,推理时图像修复方法本质上难以应对高推理延迟场景
对此,来自PI公司的研究者 Kevin Black、Allen Z. Ren、Michael Equi、Sergey Levine通过一种++训练时模拟推理延迟的++ 图像修复方法增强RTC系统,彻底消除推理阶段的计算开销『we augment RTC withan inpainting methodthat ++simulates inference delay at training time++ and eliminates any inference-time computational overhead』
- 该方法可作为推理时RTC的直接替代方案:无需修改模型架构或机器人运行时环境,仅需添加数行代码即可实现
在模拟基准测试中,训练时实时分块(training-time RTC)在高延迟场景下表现优于推理时实时分块(inference-time RTC) - 真实场景验证表明,通过对未经动作前缀调节预训练的基础模型进行微调,可成功实现训练时RTC的部署
比如通过将训练时实时分块应用于π0.6 VLA模型24,作者在两项高复杂度任务(箱体构建与浓缩咖啡制作)中展现出优于推理时实时计算的性能提升
1.1.2 相关工作
首先,对于动作分块与VLA模型
- 动作分块9,26已成为端到端模仿学习中视觉运动控制的实际标准方法。近期研究表明,通过增强视觉语言模型(VLM)生成动作分块的能力,在机器人操作领域取得显著成功,由此催生了VLA4,6-8,10-12,14,17,28,29
- 随后涌现出大量方法,旨在解决大型VLA模型与高频控制之间的协调难题
例如Gemini Robotics23与GR00T3采用分层式VLA架构,将模型拆分为重量级系统2(高层规划)与轻量级系统1(底层动作生成)组件
MiniVLA 2 和 SmolVLA 20 提出的视觉语言动作模型架构,相比大多数设计具有更快的运行速度和更高的效率,使得边缘设备上的推理部署更具可行性
这些贡献与本文介绍的Training-Time RTC正交,各自存在权衡取舍
其次,对于VLA的实时执行
- 最密切相关的先前研究是实时分块技术(RTC; 5),其提出的异步执行框架为本研究奠定了基础
- 同样相关的是 SmolVLA 20,其提出的异步执行算法与 RTC 技术相似;然而 SmolVLA 未能解决分块间不连续性问题,导致分块衔接处出现分布外的'抖动'现象
- 与本研究同期,A2C2 19 和 VLASH 22 分别通过添加轻量级校正头模块和基于单个未来动作的条件处理,解决了不连续性问题
与VLASH不同,作者在完整未来动作前缀上进行条件约束
1.1.3 背景知识
作者采用与RTC5相同的问题建模
-
起始于动作分块策略
其中
表示未来动作块
且称 -
为考虑模型推理耗时,作者定义
若推理始于第
但若满足作者称当前块与先前块重叠的这
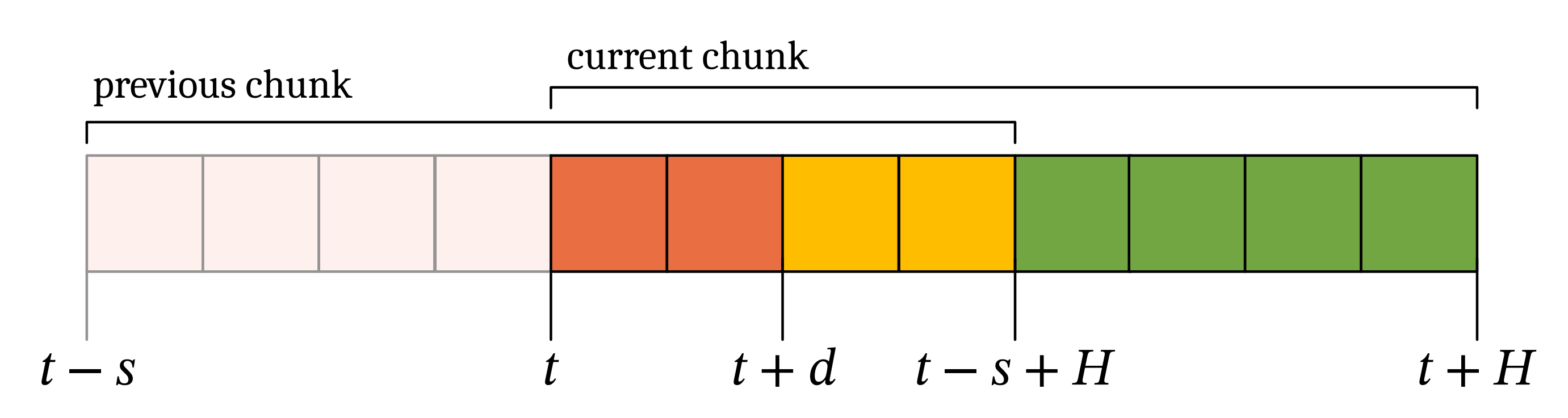
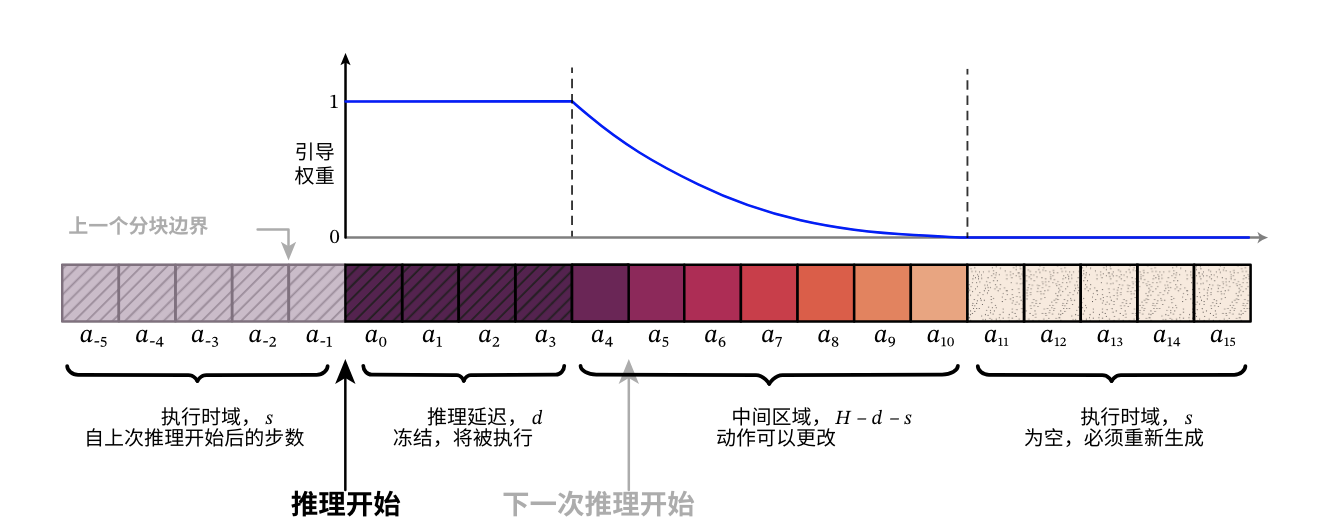
上图展示两个重叠动作分块的示意图位于时间点 t 与 t+d 之间的动作(取自前一分块)即为动作前缀(红色标注)
由图可知,必须满足约束条件
-
作者考虑采用条件流匹配13训练的策略,该方法最小化以下损失函数:
其中
// 待更