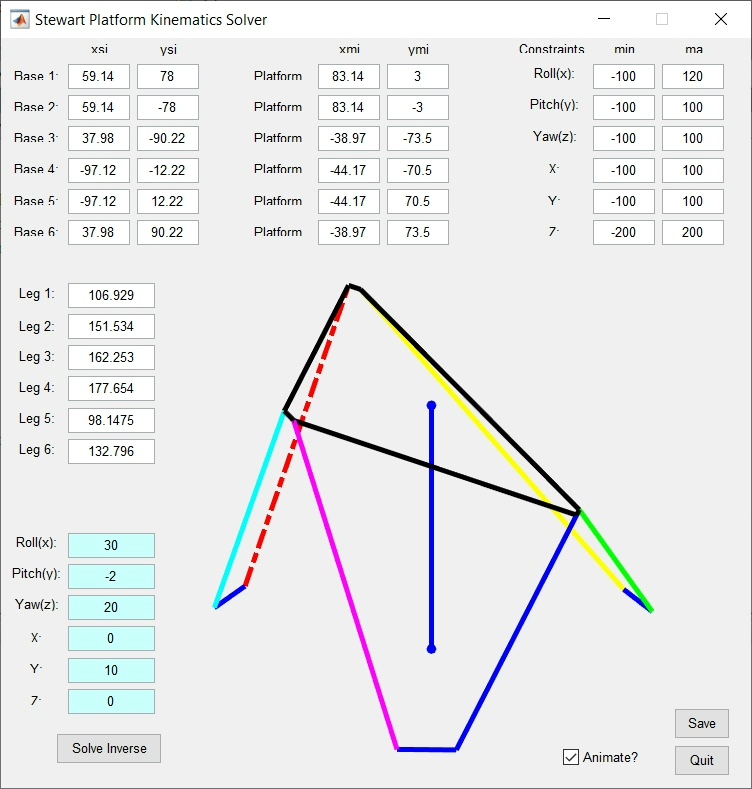
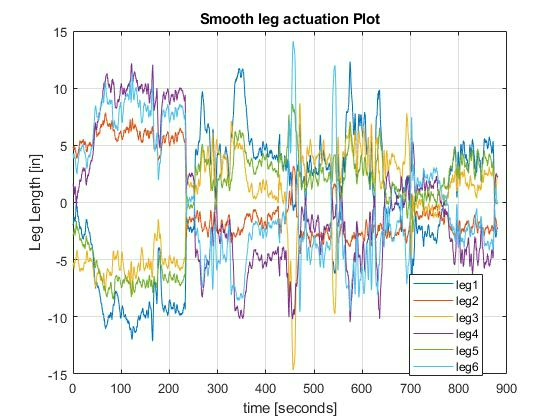
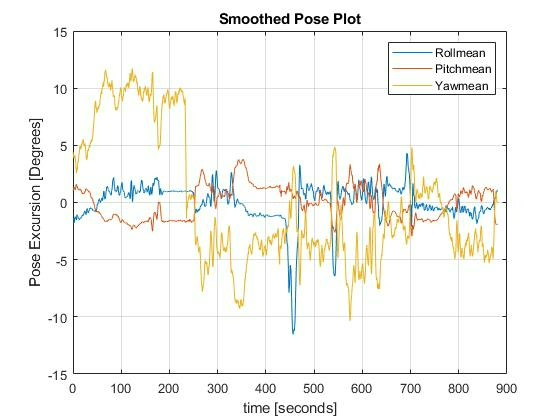
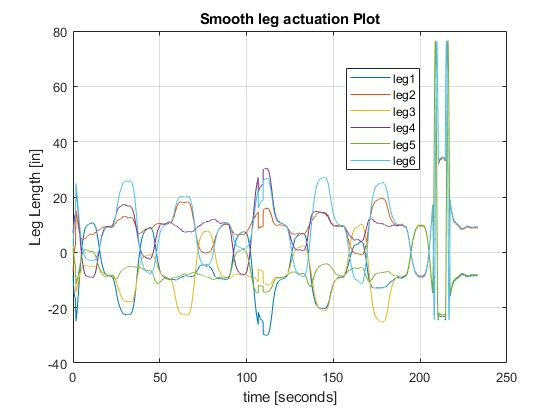
MATLAB 和Processing 的仿真环境用于对Stewart 平台问题进行建模,采用GUI界面进行控制 MATLAB 模型用于绘制腿部驱动图。 该代码可以确保真实的模拟器腿不会超过操作范围内的最大偏移。
在工程领域,Stewart平台一直是个备受瞩目的研究对象。最近我在做关于Stewart平台的项目,用到了MATLAB和Processing这两个强大的工具,今天就来跟大家分享一下相关的经历和代码。
我们先来说说MATLAB。MATLAB在这个项目里扮演了绘制腿部驱动图的重要角色。在Stewart平台的复杂系统中,腿部驱动的精确模拟至关重要。下面这段MATLAB代码是用来绘制腿部驱动图的关键部分:
matlab
% 定义一些参数,假设这些参数是根据Stewart平台的实际规格确定的
maxOffset = 10; % 操作范围内的最大偏移
legLength = 50;
theta = 0:0.01:2*pi;
x = legLength * cos(theta);
y = legLength * sin(theta);
% 确保腿不会超过最大偏移
for i = 1:length(x)
if abs(x(i)) > maxOffset
x(i) = sign(x(i)) * maxOffset;
end
if abs(y(i)) > maxOffset
y(i) = sign(y(i)) * maxOffset;
end
end
figure;
plot(x, y);
xlabel('X - 坐标');
ylabel('Y - 坐标');
title('Stewart平台腿部驱动图');这段代码里,我们首先定义了最大偏移maxOffset和腿长legLength。通过极坐标转换得到了腿部可能的运动轨迹(x和y)。之后,一个for循环遍历这些点,检查每个点在x和y方向上是否超过了最大偏移。如果超过了,就把它限制在最大偏移的边界上,这样就能确保真实的模拟器腿不会超过操作范围内的最大偏移啦。最后使用plot函数绘制出腿部驱动图,加上轴标签和标题,让图形更加清晰明了。
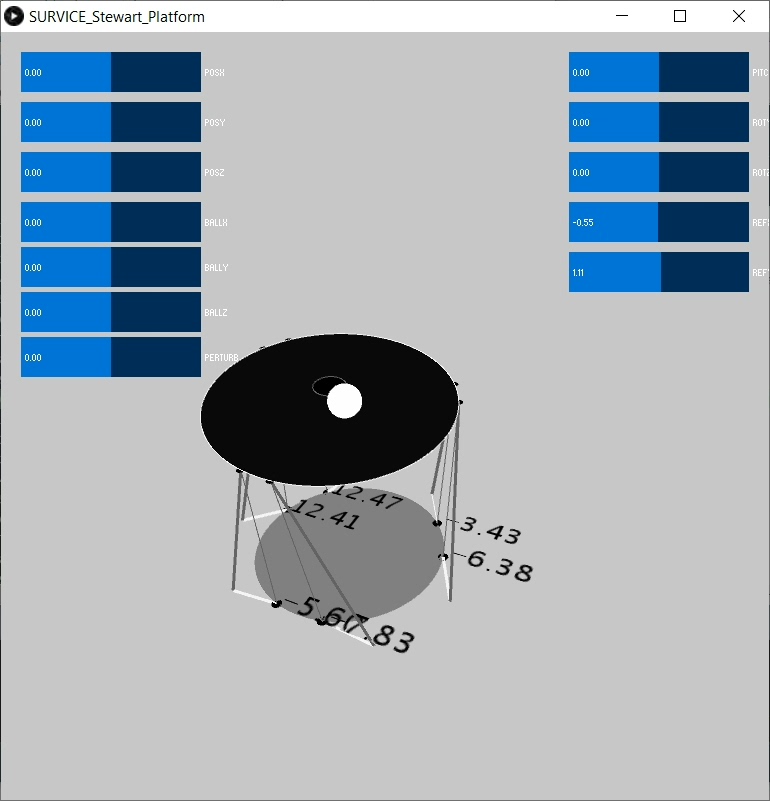
再看看Processing。它和MATLAB一起,构建了对Stewart平台问题进行建模的仿真环境,并且采用了GUI界面进行控制。虽然Processing和MATLAB语法不太一样,但它们的配合非常默契。下面是一段简单的Processing代码示例,用于初始化GUI界面的一部分:
java
import processing.gui.*;
Button controlButton;
void setup() {
size(400, 300);
controlButton = new Button(this, 100, 100, 200, 50, "控制Stewart平台");
}
void draw() {
background(220);
controlButton.display();
}在这段代码中,我们引入了processing.gui库,这是用于创建GUI元素的。setup函数里,我们设置了窗口大小,并创建了一个按钮controlButton,位置在(100, 100),宽200高50,按钮上显示"控制Stewart平台"。draw函数则负责不断刷新窗口,绘制背景并显示按钮。通过这样的GUI界面,我们可以更加直观地对Stewart平台的仿真进行控制。
MATLAB和Processing的结合,让Stewart平台的建模和仿真变得更加有趣和高效,希望我的这些分享能给同样在研究相关内容的小伙伴们一些启发!