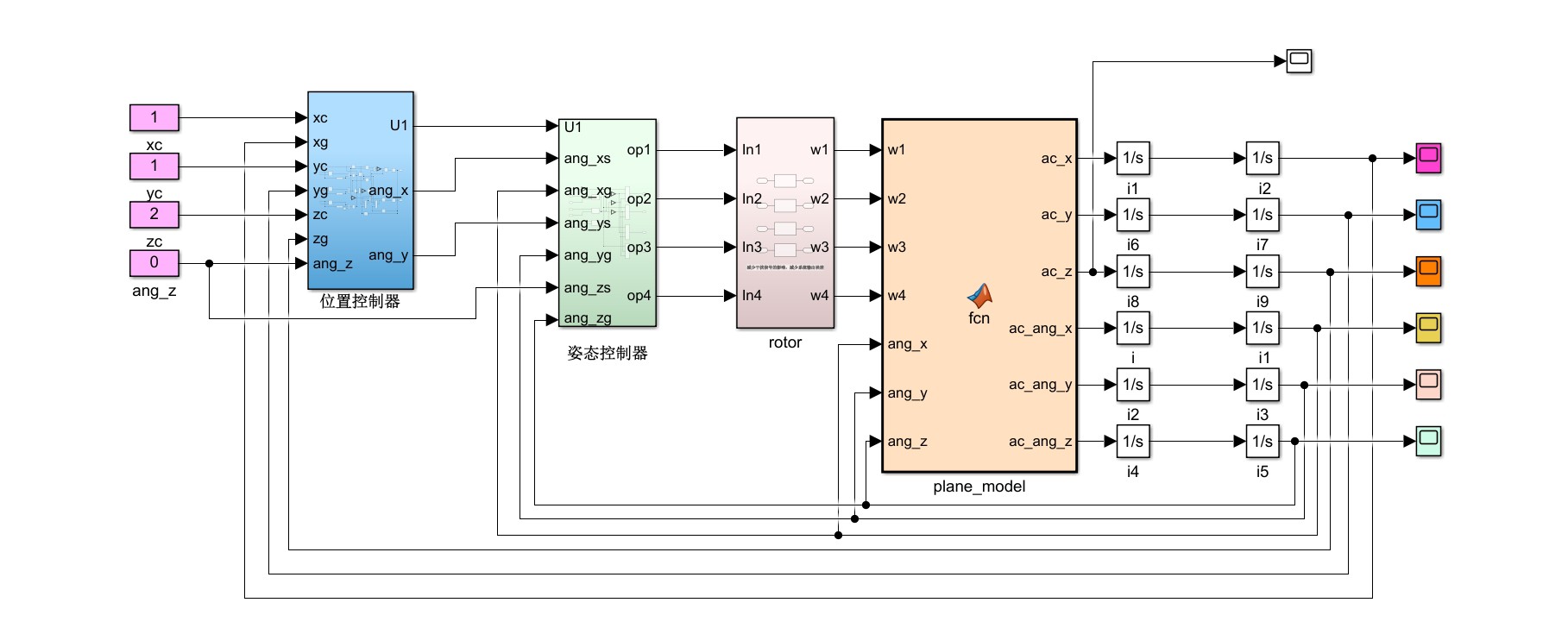
四旋翼无人机PID控制仿真模型 模型:四旋翼无人机动力学模型。 包含力方程组与力矩方程组 控制策略:用经典PID控制算法对其内环姿态和外环位置进行控制 内环姿态环,外环位置环 报告:有建模和仿真报告,很详细,简洁易懂。 下图展示
在无人机领域,四旋翼无人机凭借其独特的机动性和操作便利性,成为了研究热点。今天咱就来唠唠四旋翼无人机的PID控制仿真模型。
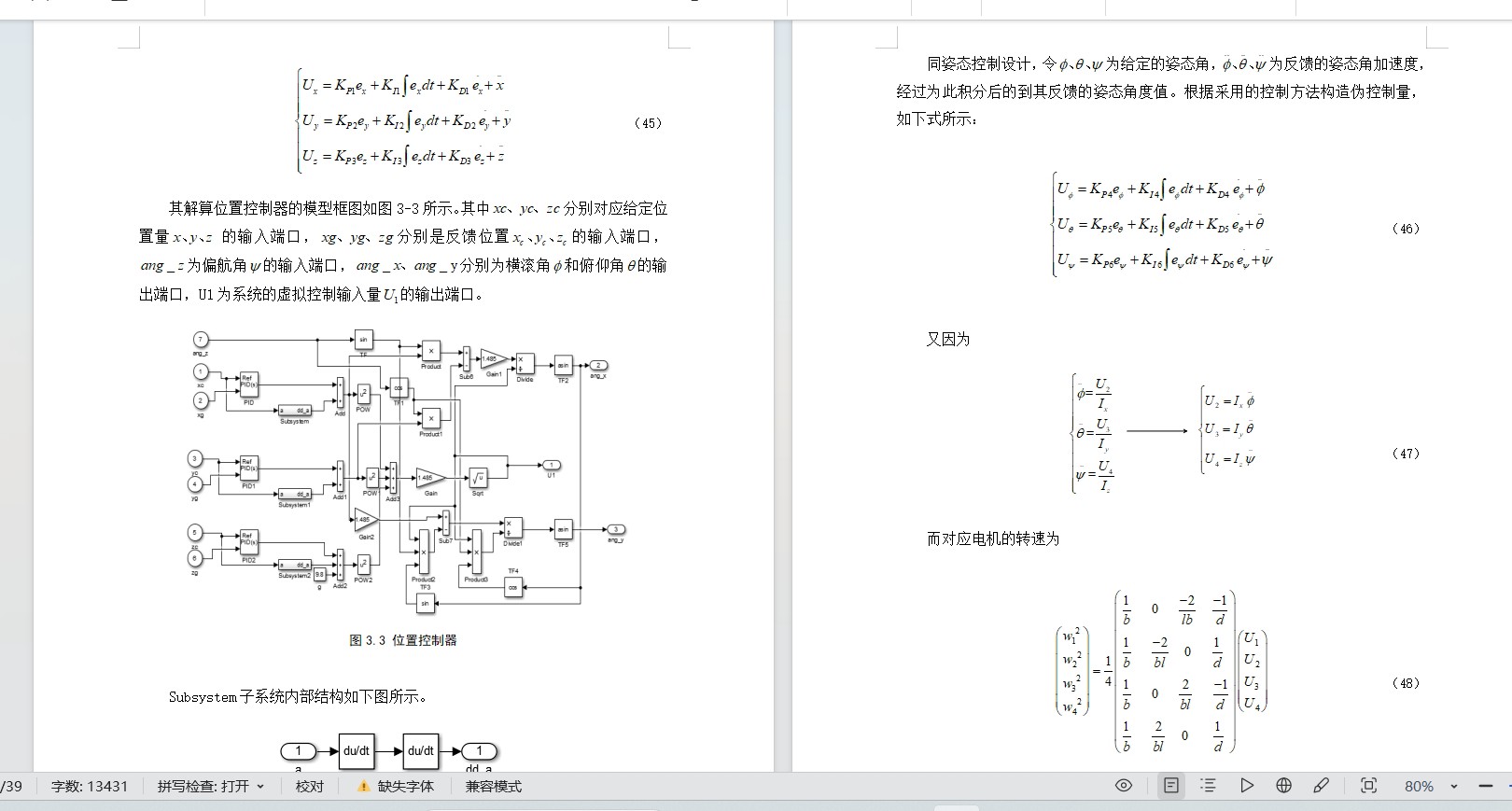
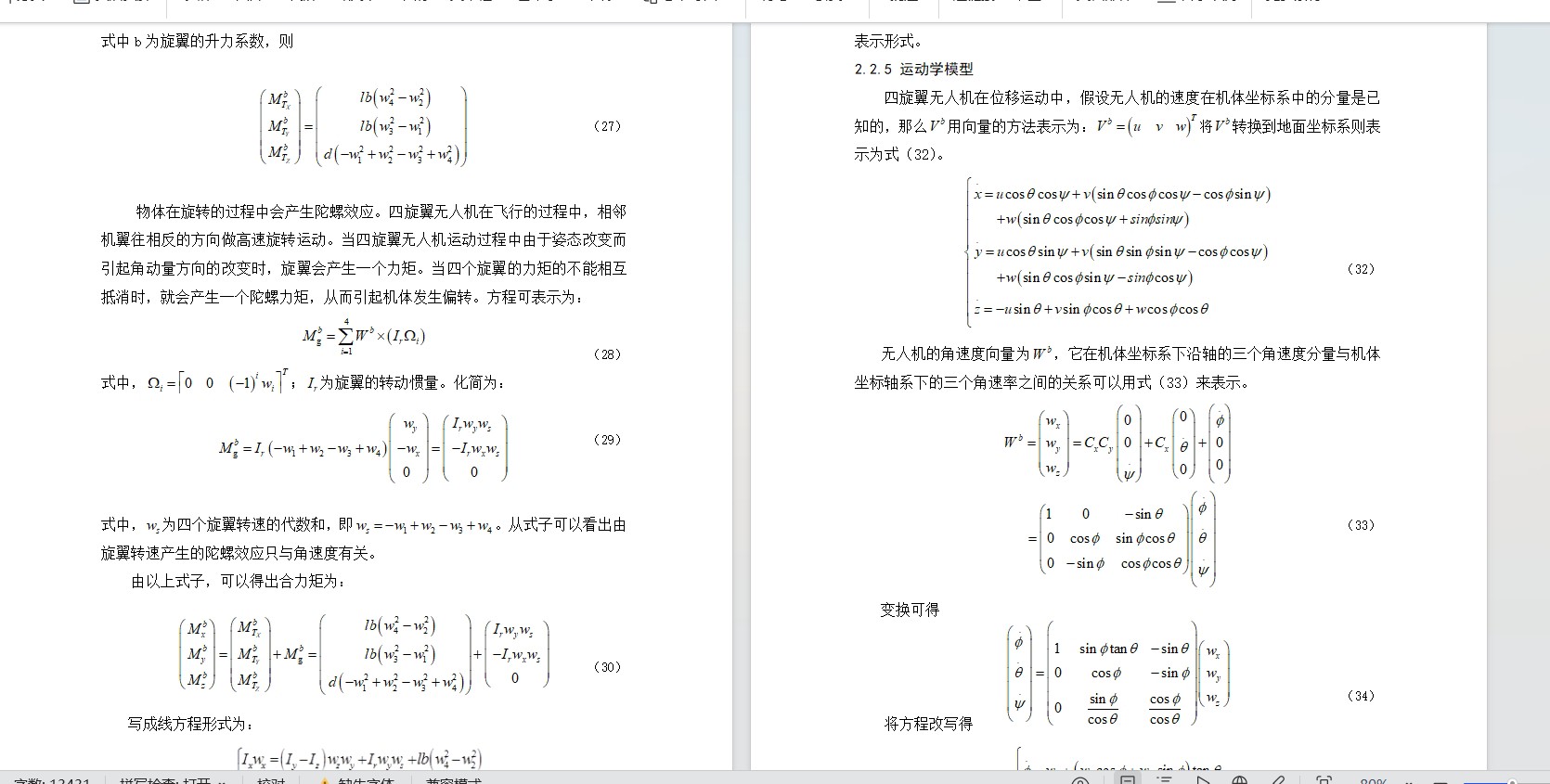
一、四旋翼无人机动力学模型
四旋翼无人机的动力学模型是其控制的基础,它主要包含力方程组与力矩方程组。
想象一下,四旋翼无人机在空中飞行,它受到来自四个旋翼产生的力和力矩的作用。力方程组描述了无人机在空间三个方向(x、y、z)上所受合力与运动的关系。以z方向为例(垂直方向),总的升力F等于四个旋翼升力之和,F = F*1 + F* 2 + F*3 + F*4,根据牛顿第二定律,F - mg = m\\ddot{z},这里m是无人机质量,g是重力加速度,\\ddot{z}是z方向的加速度。

力矩方程组则关乎无人机的姿态变化,比如俯仰、滚转和偏航。以俯仰力矩M*x为例,M* x = l(F*2 - F* 4),l是旋翼到无人机中心的距离,F*2和F*4分别是对应旋翼产生的升力,俯仰力矩决定了无人机在x轴方向的转动情况。
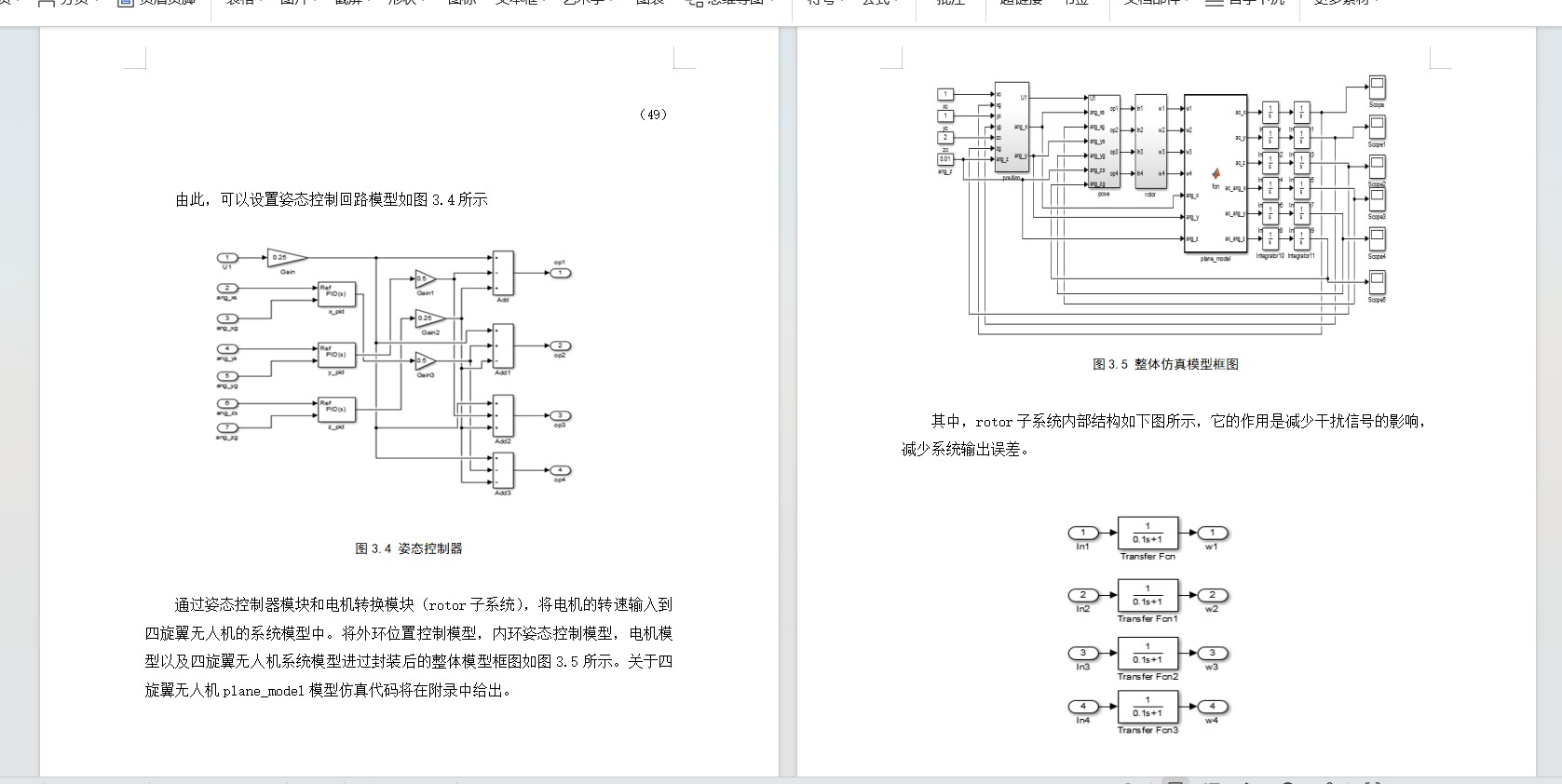
二、控制策略 - PID控制算法
咱采用经典的PID控制算法来对四旋翼无人机的内环姿态和外环位置进行控制。
内环姿态环
姿态环主要负责稳定无人机的姿态,也就是控制无人机的俯仰角、滚转角和偏航角。以俯仰角控制为例,PID控制器的输入是期望俯仰角\\theta*{des}和实际俯仰角\\theta* {actual}的差值e*{\\theta} = \\theta*{des} - \\theta_{actual}。
python
# 简单的俯仰角PID控制代码示例
Kp_pitch = 1.0
Ki_pitch = 0.1
Kd_pitch = 0.01
integral_pitch = 0
prev_error_pitch = 0
def pitch_control(theta_des, theta_actual, dt):
global integral_pitch, prev_error_pitch
error_pitch = theta_des - theta_actual
integral_pitch += error_pitch * dt
derivative_pitch = (error_pitch - prev_error_pitch) / dt
control_signal_pitch = Kp_pitch * error_pitch + Ki_pitch * integral_pitch + Kd_pitch * derivative_pitch
prev_error_pitch = error_pitch
return control_signal_pitch代码分析:在这个代码片段中,首先定义了PID控制器的三个参数Kp*pitch(比例系数)、Ki* pitch(积分系数)和Kd*pitch(微分系数)。然后初始化积分项integral* pitch和上一次的误差preverrorpitch。在pitchcontrol**函数中,计算当前误差error pitch,更新积分项,计算微分项,最后根据PID公式得出控制信号controlsignalpitch。
外环位置环
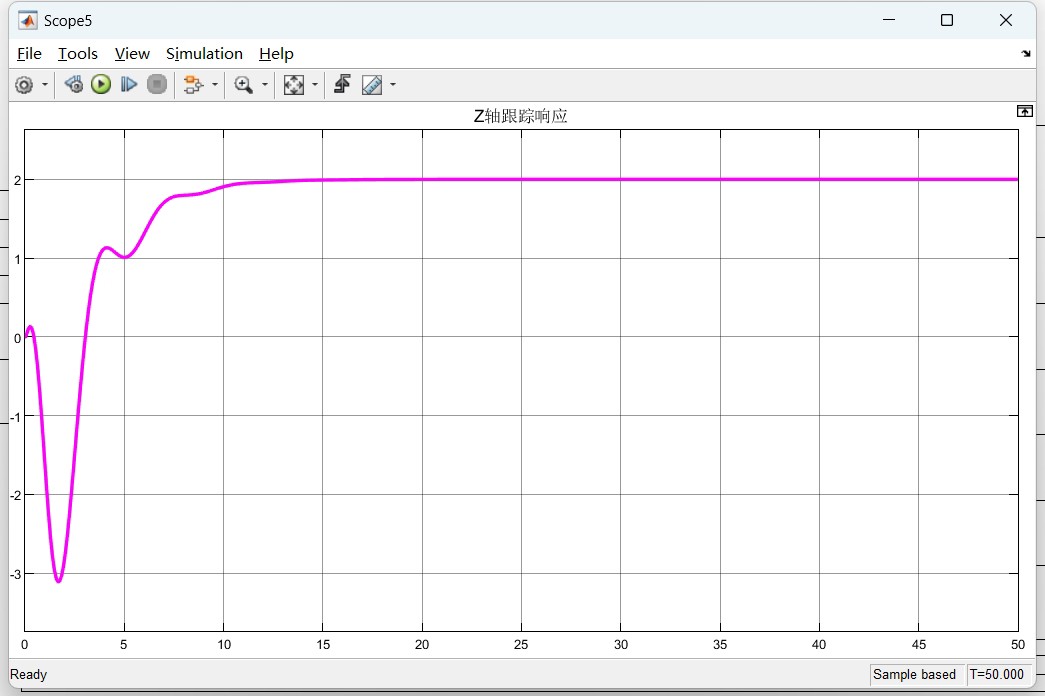
外环位置环负责控制无人机的空间位置,如x、y、z坐标。以z方向位置控制为例,同样,PID控制器的输入是期望高度z*{des}和实际高度z* {actual}的差值e*z = z*{des} - z_{actual}。
python
# 简单的高度PID控制代码示例
Kp_height = 2.0
Ki_height = 0.2
Kd_height = 0.02
integral_height = 0
prev_error_height = 0
def height_control(z_des, z_actual, dt):
global integral_height, prev_error_height
error_height = z_des - z_actual
integral_height += error_height * dt
derivative_height = (error_height - prev_error_height) / dt
control_signal_height = Kp_height * error_height + Ki_height * integral_height + Kd_height * derivative_height
prev_error_height = error_height
return control_signal_height代码分析:和姿态环类似,这里定义了高度控制的PID参数,初始化积分和上一次误差。在heightcontrol**函数里,通过计算误差、积分和微分项,得出用于高度控制的信号control signal_height。
三、建模和仿真报告
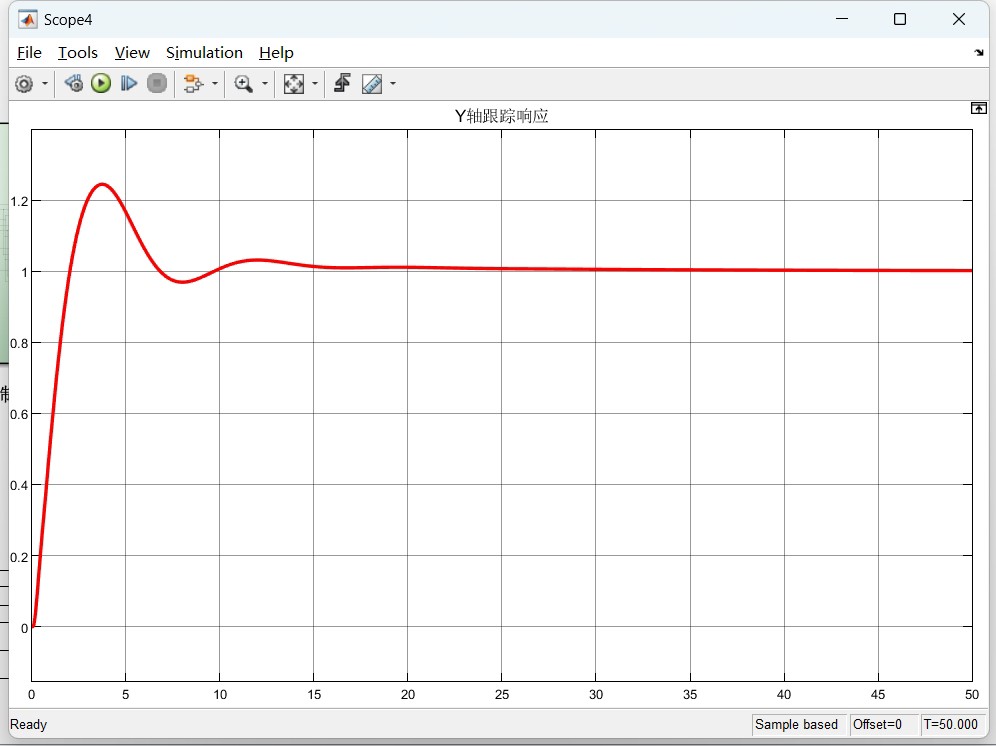
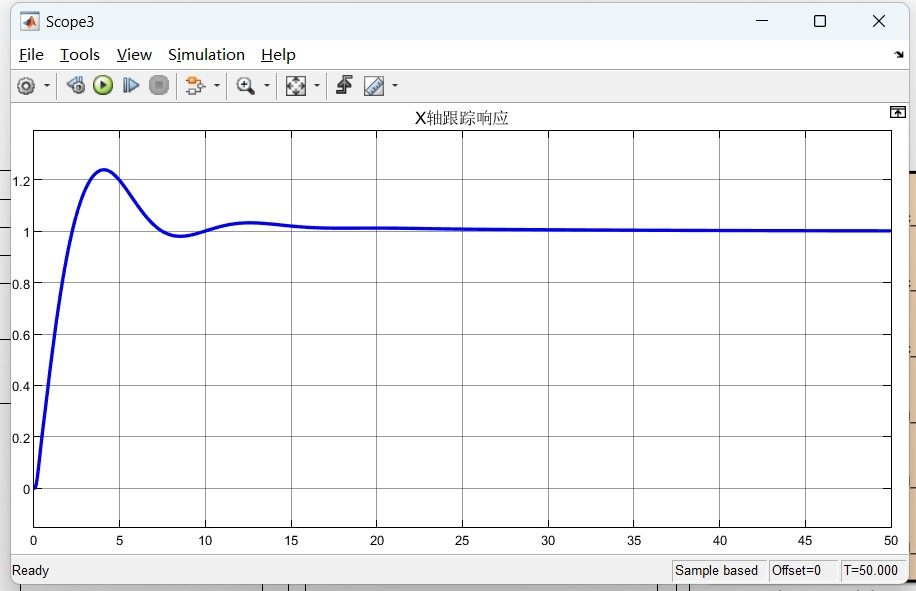
咱有详细且简洁易懂的建模和仿真报告,可惜这里没办法详细展开报告里的内容,不过大致思路就是依据前面提到的动力学模型建立数学模型,然后通过代码实现PID控制算法,并在仿真环境中进行测试。从报告里可以清晰看到无人机在各种设定条件下,姿态和位置如何精准地跟随期望输入,验证了PID控制策略在四旋翼无人机控制中的有效性。
通过对四旋翼无人机PID控制仿真模型的研究,我们对无人机的飞行控制有了更深入的理解,期待未来能在这个基础上玩出更多新花样!