近日,由西南大学计算机与信息科学学院、软件学院与 AtomGit 共同主办,OpenLoong 开源社区、智源研究院、华为 DevUI 开源社区以及西南大学开源与网络安全协会协办的 AtomGit「源启高校」· 西南大学站 成功举行。

 活动现场,国家地方共建人形机器人创新中心(以下简称"国地中心")机器人软件工程师 Wang Xu 代表 OpenLoong 开源社区带来了精彩演讲,深度解析了社区在人形机器人领域的技术创新、产品生态及开源实践,为现场师生呈现了一场前沿科技与开源精神交融的思想盛宴,与来自高校的年轻开发者们共同探讨人形机器人技术的未来方向。
活动现场,国家地方共建人形机器人创新中心(以下简称"国地中心")机器人软件工程师 Wang Xu 代表 OpenLoong 开源社区带来了精彩演讲,深度解析了社区在人形机器人领域的技术创新、产品生态及开源实践,为现场师生呈现了一场前沿科技与开源精神交融的思想盛宴,与来自高校的年轻开发者们共同探讨人形机器人技术的未来方向。
开源的入口,总是从好理解的地方开始
活动伊始,西南大学计算机与信息科学学院 软件学院院长罗辛教授发表开场致辞。他首先对到场的行业演讲嘉宾表示热烈欢迎,向联合主办与协办方致以诚挚感谢,感谢各方共同搭建起这场优质的技术交流平台。罗院长鼓励现场同学珍惜此次难得的学习机会,主动拓宽技术视野、汲取前沿知识,在交流中提升自我,并提前祝贺活动圆满举行,祝愿每一位到场学子都能满载而归、学有所获。
活动现场共有五大开源主题分享依次展开:
- 《告别 "纸上谈兵":轻松上手的开源 大模型 实践指南》
AtomGit AI 社区产品经理罗萱带来了一站式 AI 开发平台的实践分享。她介绍到 AtomGit AI 社区作为开源大模型全链路赋能平台,集成模型仓库、在线开发、推理部署等能力,打通 "学习 - 应用" 全流程,让开发者能低门槛、高效地参与 AI 开源创新。
- 《格物致知,统一的人形机器人开源开发范式》
OpenLoong 开源社区代表、国家地方共建人形机器人创新中心工程师 Xu Wang,聚焦开源机器人开发的核心痛点,分享了社区的开源实践:
-
以 OpenLoong 开源项目为基础,构建 "硬件 - 软件 - 数据 - 平台" 开源生态;
-
推出 "格物 - 全链仿真平台" 与 "致知 - 通用具身开发平台" 两大开源工具,实现 "仿真 - 实机" 全流程开发闭环,支持异构机器人适配与代码一次开发、多端通用;
-
开放灵巧手、感知头等核心组件的开源方案,降低开发者参与人形机器人项目的成本。

- 《MateChat 智能化前端解决方案,轻松构建开源智能化应用》
华为云高级前端工程师朱俊林带来了 MateChat 的开源前端能力的分享:从 MateChat 的基础功能讲起,演示如何用其搭建个人智能助手,并分享了参与 MateChat 开源贡献的路径与后续演进计划,助力开发者快速接入开源前端生态。

- 《用 AI 编写出开源项目,人人都能解锁六边形战力》
知名科技博主、python-office 作者晚枫分享了 AI 时代开发者的能力重构路径。他指出 AI 可加速代码生成、文档撰写与测试流程,通过 python-office 的实战案例,展示了模块化设计的全场景覆盖能力,并详解了 AI 在打包脚本生成、Wiki 更新等开源场景的应用,助力开发者借助 AI 突破技能瓶颈,实现综合能力全面进化。

- 《具身大小脑协作框架与开源模型构建》
智源研究院研究员曹洺语介绍了智源推出的 RoboOS 具身大小脑协作框架与核心 RoboBrain 模型,通过 "高层规划 + 精细控制" 的开源架构,推动具身智能向多任务、跨本体的通用方向发展,为大家打开了具身智能研究的新视野

解构人形机器人开发的 "格物致知" 之道
Wang Xu带来的演讲围绕 OpenLoong 开源社区的核心技术布局与产品实践展开,从公司定位、产品研发、平台能力到场景应用,全方位展现了人形机器人开发的全链条解决方案。

(一)社区定位:搭建开源协作的创新生态
OpenLoong 开源社区由国地中心发起,国地中心自 2024 年起揭牌组建,至今相继发布了全尺寸通用人形机器人开源公版机【青龙】机器人、异构人形机器人训练场 【麒麟】训练场、异构人形机器人真机数据集【白虎】数据集、以及2.0B具身操作大模型【龙腾】等核心成果。OpenLoong 开源社区自成立以来始终以 "人人都可以打造属于自己的机器人" 为美好愿景,持续推进技术开源与生态共建,并将 OpenLoong 开源项目正式捐赠至开放原子开源基金会,一步步构建起 "硬件 - 软件 - 数据 - 平台" 四位一体的开源生态体系,为全球开发者提供了低成本、高可用的创新基础。

(二)双平台驱动:格物致知赋能全流程开发
为破解人形机器人开发周期长、虚实脱节、异构适配难等痛点,OpenLoong 社区打造了 "格物 - 全链仿真平台" 与 "致知 - 通用具身开发平台",形成从仿真到实机的全流程开发闭环:
-
格物 - 全链仿真平台:以生成式模型驱动动作生成,集成动作重映射模块构建机器人动作库,结合前馈动作与传统 + RL 混合方法加速模型训练。平台支持一键式模型导入与参数配置,内置 100 + 双足、轮足、四足等不同构型的训练案例,通过 Learn in Sim、Sim2Sim、Sim2Real、Learn in Real 四大模块实现虚实贯通的持续学习,大幅降低开发成本与测试风险;
-
致知 - 通用具身开发平台:包含跨域遥操作系统与本机控制系统两大核心。跨域遥操作系统基于 WebRTC 与 gRPC 技术实现纯软件公网穿透,无需复杂配置即可实现机器人跨域远程控制,公网与局域网操作体验一致,支持集群控制与协议无关特性;本机控制系统采用全自研模块化设计,突破异构支持、生态拓展、全链仿真三大核心技术,实现 1kHz 实时力控闭环、1m/s 行走速度,支持下蹲、弯腰、搬运等全身动作,兼容 x64/aarch64 架构与 CPU/GPU/NPU 算力平台,做到 "一遍代码开发,仿真验证与实机部署全通用"。

(四)场景落地:赋能千行百业的智能化升级
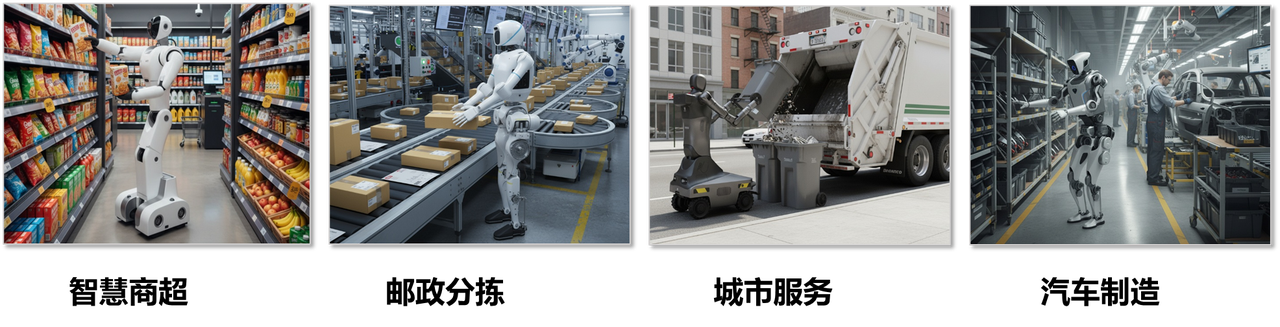
演讲中,Wang Xu 展示了 OpenLoong 人形机器人在多领域的示范应用:在智慧商超、邮政分拣、汽车制造、城市服务等垂类场景中,机器人通过模拟真实环境与协同系统,完成清点补货、包裹分拣、内饰件安装、垃圾清运等自动化操作;在智能制造场景中,青龙 Pro 机器人实现工业环境下的精准作业;在科研教育与开源项目中,青龙 Lite 以低成本、高开放性成为开发者与师生的理想选择。这些场景落地成果充分验证了社区技术的实用性与可靠性,也彰显了开源技术赋能产业升级的核心价值。
OpenLoong 开源社区:共建共享人形机器人创新生态
对于 OpenLoong 来说,这不仅是一场分享,也是一场"相互看见"
OpenLoong 一直相信,开源社区的生命力来自年轻开发者。当他们第一次能完整跑通一套仿真场景、第一次通过开源驱动起一个真实机器人、第一次在 Git 上提交自己的 PR------未来就以一种很自然的方式被打开了。
这一次来到西南大学,我们不仅带来了社区正在做的事情,也看到了更多可能性:有学生想参与控制系统的开发,有的想研究具身大模型,有的想做教育相关的机器人场景,还有的只希望成为一名"认真写文档的贡献者"。所有这些愿望,在开源世界里都是真正被需要的。

在开放原子开源基金会的孵化下,OpenLoong 开源社区积极联动、华为鸿蒙 / 欧拉生态、高校科研机构等多方力量,构建起 "产学研用" 协同创新网络,本次 AtomGit「源启高校」西南大学站活动,是社区深耕高校生态、助力人才培养的重要实践。此外,社区参与出题的开放原子大赛**"用格物平台实现机器人1v1踢足球大赛"**正在进行中,赛题设置了总计 23 万元的丰厚奖项,面向开发者征集创新方案,以赛事为纽带激发开源创新活力。
加入我们
OpenLoong 开源社区将持续聚焦人形机器人核心技术突破,深化 "格物致知" 开发范式,完善开源生态与开发工具链,推动更多核心技术开源共享。同时,社区将进一步加强与高校、企业的合作,开展科研攻关、人才培养、项目孵化等工作,让开源技术成为推动人形机器人产业发展的核心动力,助力更多开发者实现技术梦想,共同迈向具身智能新时代。
此次 AtomGit「源启高校」西南大学站活动的成功举办,为 OpenLoong 开源社区与高校师生搭建了深度交流的桥梁。未来,OpenLoong 社区将继续走进更多高校,传递开源精神、分享前沿技术,欢迎广大开发者、师生加入社区,我们将一起携手,共同构建开放、协作、创新的人形机器人开源生态!
"OpenLoong" 是全球领先的人形机器人开源社区,秉承技术驱动与开放透明的价值观,致力于汇聚全球开发者推动人形机器人产业发展。由国家地方共建人形机器人创新中心发起的 OpenLoong 项目,是业内首个全栈、全尺寸的开源人形机器人项目,有着人人都可以打造属于自己的机器人的美好愿景,旨在推动人形机器人全场景应用、助力具身智能时代的到来。
- OpenLoong开源社区将定期举办线上、线下活动,免费报名,免费参加! 欢迎加入 OpenLoong 开源社区,社区内将随时更新活动信息,探索人形机器人技术,共享创新成果,在这里一起见证开源的力量!