【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing @163.com】
图像处理中的3a算法,是大家都比较熟悉的部分。但是对于入门的camera来说,或者是大部分相机而言,af都是不需要调节的。所谓的af,那就是自动对焦,那就是修正镜头和camera sensor之间的距离。其他awb和ae,可以通过算法调整,也可以通过外部光源补充来解决,只有这个af麻烦一点,涉及到电机控制。正好借着这个topic,了解下电机控制。
1、电机控制一般是mcu完成
电机有大小马力之分,一般对实时性要求比较高,通常都是mcu来完成的。较早的时候,电机控制算法涉及到浮点运算,通常都是dsp来完成,后来算力越来越强,这部分工作就变成mcu来处理。
2、电机可以控电流、控速度、控距离
控速度和控距离,大家都比较好理解。所谓的控电流,一般就是控制扭矩,比如拖重物的时候就慢一点,轻负载的时候就快一点;爬坡的时候慢一点,平地的时候快一点,输出电流一致。如果不控制电流,那么很容易堵转,或者温度过高,甚至有失速、失控的风险。
3、电机+机械结构=无限可能
电机的应用场景远比我们想象的多,且不说白色家电基本上就是电机+压缩机的天下。工业领域,各行各业的存在离不开机械,但是机械自动化和智能化都离不开电机的参与。其他军工、医疗、机器人、智能汽车领域,都是如此。
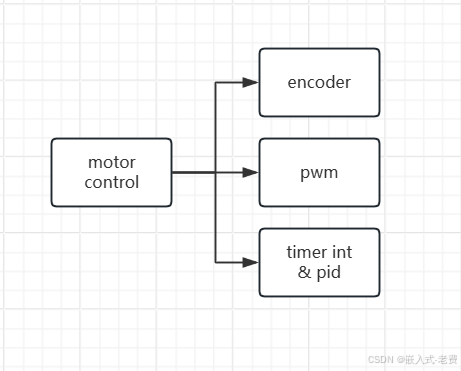
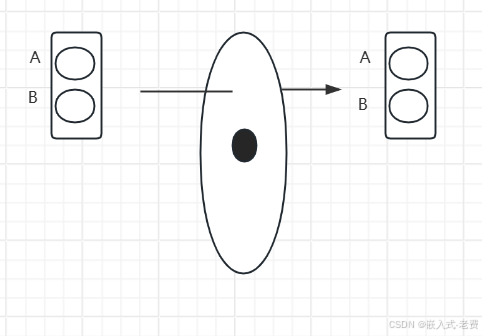
4、编码器
编码器很多时候是装在电机上的。**编码器数出来,可以看成一段、一段的方波,连接到mcu的定时器上,定时器设置成编码器格式,就可以采样到方波的个数。**配合精度、一圈的方波数量、车轮半径,很容易知道当前行走的距离和速度等数值。同时,很多编码器测速时,需要连接A、B两组信号,这样通过相位差就知道是正转还是反转,也可以A、B做一个交叉校验。
5、驱动器
在mcu控制器和电机之间,一般还有一个驱动器。电机有的时候需要的工作电压很大,远远不是5v这种低电压能够推动的,所以mcu给驱动器的是控制信号,本身电机转起来,还需要一个驱动器。5v这种控制板电压,本身能给出的只能是一个弱电控制信号。
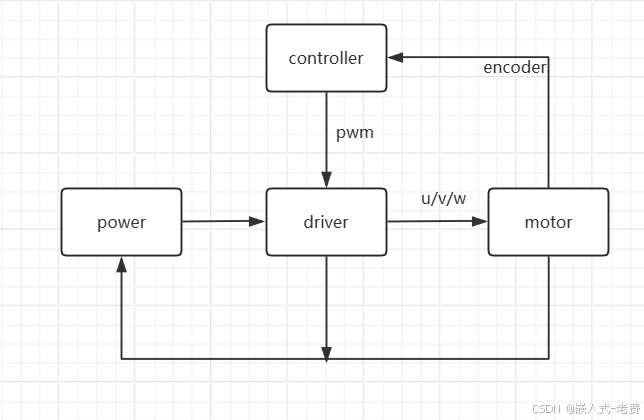
6、pwm信号
mcu控制器对电机的控制,一般就是通过pwm的频率,来间接控制电机的转速。此外正反向也是通过给驱动器一个gpio信号来完成的。
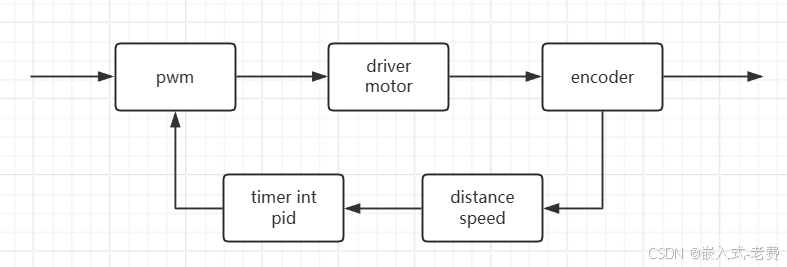
7、pid闭环控制
大部分mcu都是用pid算法来控制电机的。简单一点的,就是单层pid控制。复杂一点的,就是双层、多层pid控制,即先控制距离,再控制速度,最后发送给电机。pid算法执行的时候,都是在mcu定时器中断里面完成的,这是mcu电机控制很鲜明的一个特点。
8、mcu+arm soc控制的模式
现在比较流行人型机器人,传统的机器人,一般就是机械臂,但是现在的机器人可以扫地,可以除草,还可以做货物搬运。这些机器人要想移动,肯定少不了电机。**但是有电机是远远不够的,因此还需要一个arm soc,上面有充足的算力,可以做一些ai、复杂的事情,比如说定位导航。**只有涉及到路线查找、速度规划、底盘分解之后,最后再通过mcu分解给电机,这才构建一个完整的机器人产品。
9、回到图像
前面讨论了那么多,那么图像上怎么控制点击呢,那就是清晰度呢?那就是isp要给出一个统计值了。这样清晰度-速度,也可以做一个pid闭环控制,af就可以弄出一个基本框架来。