好的,我们来深入解析 ATE(自动测试设备)测试中的 PE(引脚电子)功能。这是芯片测试最核心的硬件基础。
一、PE的核心定位:ATE的"手脚"与"眼睛"
如果把整个ATE系统比作一个 "自动化测试机器人",那么:
-
**测试头(Test Head)** 是机器人的手臂
-
**DUT板(负载板)** 是机器人的手
-
PE(引脚电子) 就是机器人手指上的 精密执行器和传感器
核心功能一句话概括 :PE负责在测试机与芯片引脚之间建立精确、可控的电气连接,既能"施加刺激"(驱动),也能"感知响应"(测量)。
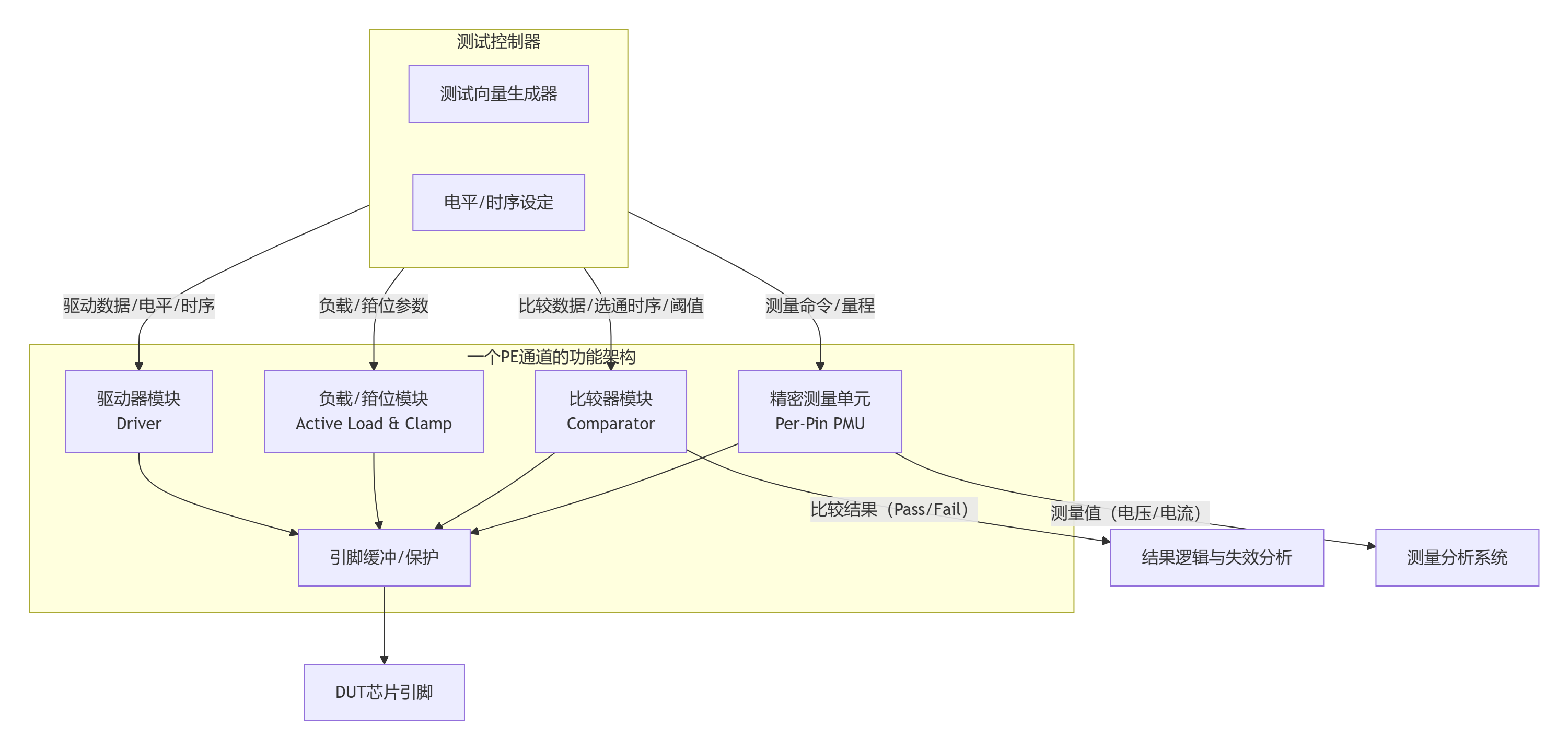
二、PE的四大核心功能模块
下图清晰地展示了一个典型PE通道的完整功能结构及其工作流程:
三、PE功能的详细解析
1. 驱动器
这是PE的 "输出手臂",负责向DUT引脚施加精确的数字激励信号。
// 在测试程序中的典型配置
LEVEL {
// 设定驱动电平
VIL = 0.0V; // 驱动逻辑'0'时的电压
VIH = 1.8V; // 驱动逻辑'1'时的电压
VOL = 0.0V; // 预期DUT输出'0'的电平(用于比较)
VOH = 1.8V; // 预期DUT输出'1'的电平(用于比较)
// 设定边沿特性
SlewRate = 1.0V/ns; // 驱动信号的摆率
DriveCurrent = 24mA; // 驱动电流能力
};
TIMING {
// 设定驱动时序
FORMAT = NRZ; // 编码格式:不归零
DRIVE_ON = 100ns; // 在周期100ns时刻驱动数据生效
DRIVE_OFF = 150ns; // 在150ns时刻关闭驱动(高阻)
};关键参数:
-
驱动强度:能输出多大电流(影响信号完整性)
-
建立/保持时间:数据相对时钟的时序关系
-
信号完整性:过冲、下冲、振铃控制
2. 比较器
这是PE的 "输入眼睛",负责采样DUT的输出信号并判断逻辑值。
TIMING {
// 设定比较(采样)时序
STROBE_ON = 180ns; // 开始采样时刻
STROBE_OFF = 190ns; // 结束采样时刻
// 或使用窗口比较
STROBE_WINDOW = (175ns, 185ns);
};
COMPARE_LEVEL {
VIL_COMP = 0.4V; // 判断逻辑'0'的阈值上限
VIH_COMP = 1.4V; // 判断逻辑'1'的阈值下限
VCOMP_REF = 0.9V; // 比较器参考电压(差分输入时)
};工作模式:
-
窗口比较:在指定时间窗口内检查信号是否稳定
-
边沿检测:检测信号跳变时刻
-
失效捕获:记录首次失效的时间和周期
3. 有源负载
模拟DUT在实际应用场景中的负载条件。
LOAD_SETTINGS {
// 电流负载设置
IOL_LOAD = 4mA; // DUT输出低电平时,PE吸入的电流
IOH_LOAD = -2mA; // DUT输出高电平时,PE源出的电流
// 钳位保护
VCLAMP_HIGH = VDD + 0.5V; // 高电平钳位,防止过压
VCLAMP_LOW = -0.5V; // 低电平钳位,防止负压
// 终端匹配(高速信号)
VTERM = 0.9V; // 终端电压
RTERM = 50Ω; // 终端电阻(匹配传输线阻抗)
};4. 精密测量单元
这是PE的 "测量手",进行高精度DC参数测量。
# DC参数测试的典型流程
def test_dc_parameter(pin_name, test_type):
# 1. 配置PMU模式
if test_type == 'IIL': # 输入漏电流(低电平)
pmu_setup(pin_name,
mode='FVMI', # 强制电压,测量电流
force_voltage=0.0V,
measure_range='1uA',
clamp_high=1.0V,
clamp_low=-1.0V)
elif test_type == 'VOL': # 输出低电平电压
pmu_setup(pin_name,
mode='FIMV', # 强制电流,测量电压
force_current=4.0mA, # 灌电流
measure_range='2V',
compliance=0.5V) # 电压顺从限制
# 2. 执行测量
pmu_connect(pin_name) # 继电器连接PMU到引脚
pmu_force_on() # 开始施加激励
time.sleep(10e-3) # 稳定时间,10ms
result = pmu_measure() # 执行测量
pmu_force_off() # 关闭激励
pmu_disconnect() # 断开连接
# 3. 判断结果
if test_type == 'IIL':
return result < 1.0e-6 # 漏电流 < 1uA ? Pass : Fail
elif test_type == 'VOL':
return result < 0.4V # VOL < 0.4V ? Pass : FailPMU测量模式:
| 模式 | 缩写 | 含义 | 典型应用 |
|---|---|---|---|
| FVMI | Force Voltage, Measure Current | 强制电压,测量电流 | 输入漏电流测试 |
| FIMV | Force Current, Measure Voltage | 强制电流,测量电压 | 输出驱动能力测试 |
| FVMF | Force Voltage, Measure Force | 强制电压,测量力 | 较少使用 |
| FIMF | Force Current, Measure Force | 强制电流,测量力 | 较少使用 |
四、PE在测试流程中的应用场景
场景1:数字功能测试
// 测试向量执行流程
TEST_SEQUENCE {
// 阶段1:初始化
SET_LEVEL(all_pins, VIL=0V, VIH=1.8V, VTERM=0.9V);
SET_TIMING(cycle=100ns, format=NRZ);
// 阶段2:施加测试向量
APPLY_VECTOR({
// 周期1:设置输入,期望输出为X(不关心)
period1: A=1, B=0, C=1, /期望输出: Y=X, Z=X/;
// 周期2:检查输出
period2: A=0, B=1, /期望输出: Y=1, Z=0/;
// 周期3-100:更多测试向量...
});
// 阶段3:收集结果
COLLECT_RESULTS();
ANALYZE_FAILURES();
};场景2:AC时序测试
def test_setup_time(data_pin, clock_pin):
"""测试建立时间"""
results = []
# 扫描数据相对时钟的偏移
for offset in range(-500, 501, 10): # -500ps到+500ps,步长10ps
# 配置时序
set_timing(data_pin, drive_at=50ns)
set_timing(clock_pin, strobe_at=50ns + offset)
# 运行测试
run_vector_test()
# 检查是否通过
if test_passed():
results.append((offset, 'Pass'))
else:
results.append((offset, 'Fail'))
# 分析建立时间
pass_offsets = [o for o, s in results if s == 'Pass']
setup_time = min(pass_offsets) # 最小可接受的建立时间
return setup_time场景3:混合信号测试
// ADC测试示例
TEST_ADC_CONVERSION {
// 1. PE配置为高阻,让模拟源驱动
SET_PIN_STATE(ANALOG_IN, Z_STATE);
// 2. 模拟源施加测试电压
ANALOG_FORCE_VOLTAGE(1.024V); // ADC的中间量程
// 3. 启动ADC转换(通过数字PE控制)
DIGITAL_WRITE(ADC_START, 1);
DELAY(10us); // 等待转换完成
DIGITAL_WRITE(ADC_START, 0);
// 4. 读取数字输出(通过数字PE)
DIGITAL_READ(ADC_DATA_BUS, 10); // 读取10位数据
// 5. 验证结果
EXPECTED_CODE = 512; // 1.024V / (2.048V/1024) = 512
TOLERANCE = 2; // ±2 LSB
VERIFY_RESULT(READ_CODE, EXPECTED_CODE, TOLERANCE);
};五、高级PE功能
1. 差分信号测试
DIFF_PAIR_SETTINGS {
PIN_P = "TX_P"; // 正端引脚
PIN_N = "TX_N"; // 负端引脚
MODE = DIFFERENTIAL; // 差分模式
// 差分驱动
VDIFF = 800mV; // 差分幅度
VCOMMON = 1.0V; // 共模电压
// 差分接收
VTHRESHOLD = 100mV; // 差分比较阈值
SKEW_CAL = ENABLED; // 启用时延校准
};2. 实时失效分析
// 配置失效捕获
FAILURE_CAPTURE {
MODE = FIRST_FAIL; // 捕获首次失效
STORE_WAVEFORM = TRUE; // 存储失效波形
SAMPLE_RATE = 10GSPS; // 采样率
MEMORY_DEPTH = 1M; // 存储深度
// 触发条件
TRIGGER_ON = "DATA_PIN != EXPECTED";
TRIGGER_DELAY = -100ns; // 触发前100ns开始记录
TRIGGER_LENGTH = 200ns; // 记录200ns窗口
};
// 分析失效数据
ANALYZE_FAILURE(failure_data) {
// 1. 时间分析
fail_time = get_fail_time(failure_data);
// 2. 电平分析
voltage_level = measure_voltage_at(failure_data, fail_time);
// 3. 边沿分析
edge_slope = calculate_slew_rate(failure_data);
// 4. 抖动分析
jitter_pp = measure_jitter(failure_data);
return diagnostic_report;
};3. 校准与补偿
# PE通道校准流程
def calibrate_pe_channel(channel):
# 1. 直流偏置校准
calibrate_dc_offset(channel)
# 2. 增益校准
calibrate_gain(channel)
# 3. 时序校准(去时延)
calibrate_deskew(channel)
# 4. 边沿速率校准
calibrate_slew_rate(channel)
# 5. 负载校准
calibrate_load(channel)
# 保存校准数据
save_calibration_data(channel, calibration_results)六、实际测试程序示例
// 完整的PE功能测试程序示例(伪代码)
TEST_PROGRAM example_pe_test() {
// === 第1部分:硬件和PE配置 ===
INITIALIZE_TESTER(); // 初始化测试机
LOAD_DUT_BOARD("board_config.xml"); // 加载DUT板配置
// 配置PE通道
CONFIGURE_PE_CHANNEL("D0", {
.mode = DIGITAL_IO,
.direction = OUTPUT,
.voltage_range = 1.8V,
.drive_strength = 12mA,
.termination = 50Ω_TO_VTERM,
.clamp_high = 2.5V,
.clamp_low = -0.3V
});
CONFIGURE_PE_CHANNEL("A0", {
.mode = ANALOG_IN,
.measure_range = 2V,
.resolution = 16BIT,
.sample_rate = 1MSPS
});
// === 第2部分:DC参数测试 ===
TEST_GROUP dc_tests {
TEST_ITEM("IIL Test", test_iil, "D1", LIMIT(0, 1uA));
TEST_ITEM("VOL Test", test_vol, "D2", LIMIT(0, 0.4V));
TEST_ITEM("VOH Test", test_voh, "D3", LIMIT(1.4V, 1.8V));
};
// === 第3部分:功能测试 ===
TEST_GROUP func_tests {
// 配置测试向量
LOAD_TEST_VECTORS("logic_test.stil");
// 设置PE时序
SET_TIMING(.cycle = 20ns, // 50MHz
.drive_edge = 2ns, // 驱动边沿
.strobe_window = (15ns, 18ns)); // 采样窗口
// 执行测试
EXECUTE_TEST_VECTORS();
// 失效分析
IF (FAILURE_DETECTED()) {
CAPTURE_FAILURE_WAVEFORM();
LOG_FAILURE_DATA();
}
};
// === 第4部分:AC时序测试 ===
TEST_GROUP ac_tests {
TEST_ITEM("Tco Test", measure_tco, "CLK", "Q", LIMIT(2ns, 5ns));
TEST_ITEM("Tsu Test", measure_tsu, "D", "CLK", LIMIT(1ns, MAX));
TEST_ITEM("Th Test", measure_th, "D", "CLK", LIMIT(0.5ns, MAX));
};
// === 第5部分:混合信号测试 ===
TEST_GROUP mixed_signal_tests {
TEST_ITEM("ADC Linearity", test_adc_dnl_inl, LIMIT(±1LSB));
TEST_ITEM("DAC Output", test_dac_output, LIMIT(±10mV));
};
// === 第6部分:测试报告 ===
GENERATE_REPORT({
.format = XML_AND_HTML,
.include_waveforms = TRUE,
.statistical_analysis = TRUE
});
RETURN_TEST_RESULTS();
}七、现代PE技术发展趋势
1. 高速高精度
-
速率:从100Mbps → 10Gbps+(用于DDR、PCIe测试)
-
精度:时序分辨率 < 5ps,电压分辨率 < 1mV
-
带宽:> 2GHz模拟带宽
2. 高集成度
-
Per-Pin架构:每个引脚都有独立的PE资源
-
集成PMU:每个通道都集成精密测量单元
-
片上DSP:实时信号处理和分析
3. 智能化
-
自适应测试:根据DUT响应动态调整测试参数
-
机器学习:预测失效、优化测试流程
-
云分析:测试数据上传云端进行大数据分析
4. 多协议支持
-
DDR5:最高6.4Gbps,需支持DFE(判决反馈均衡)
-
PCIe 6.0:64GT/s,PAM4信号,需高速PMA
-
USB4:20Gbps,需支持Thunderbolt协议
-
MIPI C-PHY/D-PHY:移动设备接口
八、调试PE问题的实用技巧
# PE问题诊断清单
def diagnose_pe_issue(symptom):
checklist = {
"无信号输出": [
"1. 检查PE通道电源",
"2. 验证PE使能状态",
"3. 检查驱动器配置(VIL/VIH)",
"4. 验证测试向量数据",
"5. 检查DUT板连接"
],
"信号幅度错误": [
"1. 校准PE驱动器增益",
"2. 检查负载配置",
"3. 验证终端匹配",
"4. 检查PCB阻抗匹配",
"5. 测量实际信号(用示波器)"
],
"时序问题": [
"1. 执行通道去时延校准",
"2. 验证测试周期设置",
"3. 检查时钟分配",
"4. 测量实际时序(用采样示波器)",
"5. 调整建立/保持时间余量"
],
"测量噪声大": [
"1. 检查接地和屏蔽",
"2. 增加测量平均次数",
"3. 调整滤波器设置",
"4. 验证PMU量程",
"5. 检查电源噪声"
]
}
return checklist.get(symptom, ["请咨询ATE供应商技术支持"])总结:PE功能的核心价值
PE是ATE与芯片之间的桥梁,其核心价值体现在:
-
精确控制:纳秒级时序控制,毫伏级电压控制
-
高保真测量:精确捕捉芯片的真实行为
-
灵活配置:支持从DC到GHz的各种测试需求
-
快速响应:实时执行测试,快速反馈结果
-
故障诊断:提供丰富的调试和诊断能力
没有强大的PE,就没有高效的ATE测试。理解PE的每个功能模块如何工作,是编写高效测试程序、调试测试问题、优化测试成本的关键。
现代ATE的竞争,很大程度上就是PE性能的竞争。随着芯片速度越来越快,接口越来越复杂,PE技术也在不断演进,以应对5G、AI、自动驾驶等新兴应用带来的测试挑战。