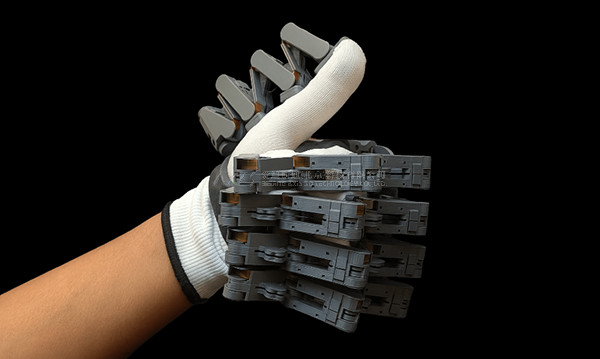
SenseGlove在远程操控人形机器人的领域带来了全新产品SenseGlove R1 触觉手套。它专为实现人形机器人手的无缝控制精心打造,集主动力反馈、精准力控制、毫米级手指跟踪精度以及振动触觉反馈等众多先进一身,为遥操作带来前所未有的触觉感知体验,同时显著增强了机器人的模仿学习能力。
核心规格
SenseGlove R1 触觉手套具备一系列令人瞩目的关键规格:
5 自由度主动力反馈:为操控提供丰富且真实的力反馈信息,让用户能够感受到直接用手操作物体触感。
1 kHz 采样速率:极高的采样频率确保数据传输的及时性和准确性,使操作指令能够迅速响应。
手指跟踪毫米级准确度和精度:对手指动作的捕捉极为精准,为精细操作提供可靠保障。
功能亮点
实时压力传感,主动力反馈精准无误
SenseGlove R1 拥有基于实时压力传感的主动力反馈系统。其 1kHz 的高速控制回路,如同一条高效的信息传输通道,能将用户施加在手套上的压力,瞬间且精准地映射到机器人手上。当用户轻轻拿起一个易碎物品时,手套会迅速感知到这种细微的力度变化,并立即调整反馈,让机器人手以同样轻柔的方式抓取物品,确保操作既精确又安全。实时压力传感功能还能根据物体的大小、硬度和阻力等特性,做出动态响应,极大地增强了操作的逼真感,仿佛物体就在用户手中一般。
毫米级手指跟踪,复杂任务轻松驾驭

SenseGlove R1在手指跟踪方面达到了毫米级的准确度和精度,这一卓越性能为用户执行复杂任务提供了强大支持。无论是组装微型精密组件,还是进行精确的设备维护操作,用户都能凭借手套对手指动作的精准捕捉,自信且轻松地完成各项任务。每一个细微的手指动作,都能被手套精确识别并转化为机器人的相应操作,真正实现了人机协同的高效与精准。
振动触觉反馈,实时感知触觉差异
SenseGlove R1 还配备了动态振动触觉反馈功能,为用户带来丰富的触觉信息。通过不同的动态振动模式,手套能够即时向用户传递关于接触位置、物体纹理和接触强度等多方面的线索。当用户佩戴手套触摸物体时,能明显感受到光滑表面与粗糙表面之间的差异,仿佛亲手触摸一般真实。在虚拟手指与物体互动时,手套还能及时发出警报,让用户第一时间了解操作情况。所有这些触觉反馈都是实时发生的,为用户营造出沉浸式的操作体验。
SenseGlove R1 触觉手套的强大功能为远程操控人形机器人带来了更多有潜力尝试的方向,同时也为众多行业的实际应用带来了新的可能和突破。SenseGlove R1现已开启预定,如有需求请关注我们的官网,或留言咨询。