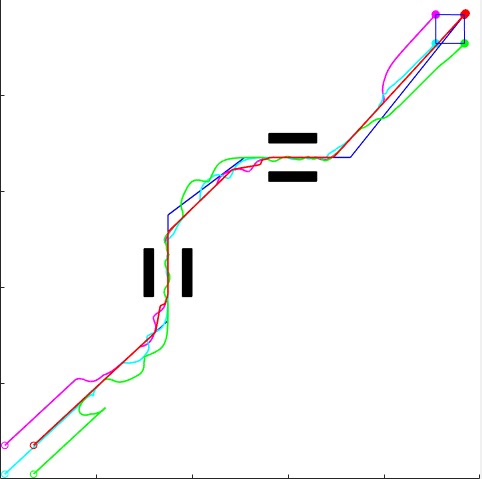
多智能体编队重构与协同避障方法研究(未发paper) 队形变换实现编队避障 1.手动设置全局路径(建图用的栅格) 2.编队采用领航跟随,leader参考全局路径运动到局部目标点,随后切换局部目标点。 follower跟随leader保持相对位置,空旷区域采用菱形队形航行,障碍物区域采用一字队形灵活避障 3.避障与智能体间避碰采用人工势场法 4.智能体位置、数量和障碍物数量、位置以及编队队形等均可自行修改
在多智能体系统的研究中,编队重构与协同避障是极具挑战性又实用的课题。今天就来聊聊我在这方面的一些研究心得,虽然还没写成paper,但其中的思路和实现过程还是很值得分享的。
队形变换实现编队避障
1. 手动设置全局路径(建图用的栅格)
我们的第一步是手动设置全局路径,这里用到了栅格地图的概念。想象一下,把整个工作空间划分成一个个小方格,就像棋盘一样,这就是栅格地图。在代码实现上,我们可以这样来简单构建一个栅格地图:
python
# 假设地图大小为100x100
map_size = 100
grid_map = [[0 for _ in range(map_size)] for _ in range(map_size)]
# 这里0代表可通行区域,后续可以根据需要设置障碍物区域为1等通过这样一个二维列表,我们就初步构建了一个简单的栅格地图。这个地图是我们后续智能体运动规划的基础,它定义了智能体可以活动的范围和环境信息。
2. 编队采用领航跟随策略
整个编队采用领航跟随(Leader - Follower)的模式。leader的任务是参考我们刚刚设定好的全局路径,一步步朝着局部目标点运动。当到达一个局部目标点后,会切换到下一个局部目标点。
python
class Leader:
def __init__(self, start_x, start_y):
self.x = start_x
self.y = start_y
def move_to_local_goal(self, local_goal_x, local_goal_y):
# 简单的移动逻辑,每次移动一步
if self.x < local_goal_x:
self.x += 1
elif self.x > local_goal_x:
self.x -= 1
if self.y < local_goal_y:
self.y += 1
elif self.y > local_goal_y:
self.y -= 1上面这段代码定义了Leader类,它有初始位置,并提供了朝着局部目标点移动的方法。
而follower的任务则是跟随leader保持相对位置。在空旷区域,整个编队采用菱形队形航行,到了障碍物区域,则切换为一字队形灵活避障。实现代码如下:
python
class Follower:
def __init__(self, relative_x, relative_y):
self.relative_x = relative_x
self.relative_y = relative_y
def update_position(self, leader_x, leader_y):
self.x = leader_x + self.relative_x
self.y = leader_y + self.relative_y这里Follower类通过相对位置来跟随leader,当leader位置更新时,follower也能及时调整自己的位置,从而保持队形。
3. 避障与智能体间避碰采用人工势场法
人工势场法是解决避障和智能体间避碰问题的关键。简单来说,我们把障碍物想象成一个会产生斥力的源,目标点则是产生引力的源。每个智能体就像一个在这个力场中运动的粒子,受到引力和斥力的共同作用,从而实现避障和向目标点移动。
python
def calculate_force(agent_x, agent_y, obstacle_x, obstacle_y, goal_x, goal_y):
# 引力系数
attractive_coefficient = 1
# 斥力系数
repulsive_coefficient = 1000
# 计算引力
attractive_force_x = attractive_coefficient * (goal_x - agent_x)
attractive_force_y = attractive_coefficient * (goal_y - agent_y)
# 计算斥力
distance_to_obstacle = ((agent_x - obstacle_x) ** 2 + (agent_y - obstacle_y) ** 2) ** 0.5
if distance_to_obstacle < 10: # 假设距离障碍物10以内开始产生斥力
repulsive_force_x = repulsive_coefficient * (agent_x - obstacle_x) / (distance_to_obstacle ** 2)
repulsive_force_y = repulsive_coefficient * (agent_y - obstacle_y) / (distance_to_obstacle ** 2)
else:
repulsive_force_x = 0
repulsive_force_y = 0
total_force_x = attractive_force_x + repulsive_force_x
total_force_y = attractive_force_y + repulsive_force_y
return total_force_x, total_force_y这段代码通过计算引力和斥力,得出智能体受到的合力,从而决定智能体下一步的移动方向。
4. 参数可自行修改
智能体位置、数量和障碍物数量、位置以及编队队形等均可自行修改。这为我们模拟不同场景提供了极大的灵活性。比如,我们可以通过修改Leader和Follower类的初始化参数来改变智能体的初始位置。
python
# 创建一个leader,初始位置为(10, 10)
leader = Leader(10, 10)
# 创建一个follower,相对leader的位置为(5, 5)
follower = Follower(5, 5)对于障碍物的设置,我们可以在栅格地图中把相应的栅格标记为障碍物。
python
# 设置一个障碍物在(50, 50)位置
grid_map[50][50] = 1通过这种灵活的设置方式,我们可以模拟各种复杂的场景,对多智能体编队重构与协同避障方法进行更全面的测试和优化。
以上就是我在多智能体编队重构与协同避障方法研究中的一些主要内容,虽然还有很多可以完善的地方,但希望这些思路和代码示例能给大家带来一些启发,一起探索这个有趣的领域。