1. 代码整体架构
主要承担 "顶层业务层" 和 "底层驱动层" 的桥梁作用,同时包含了环形缓冲区(RingBuffer)的基础操作 ------ 整体分为两大核心模块:传感器数据采集任务、设备开关控制任务,以及通用的环形缓冲区工具函数。
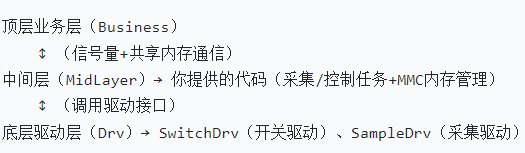
中间层的核心价值:隔离业务层和驱动层,让业务层无需关心硬件细节,驱动层无需关心业务逻辑,提升代码可维护性;
通信方式:通过 MMC(内存控制块)+ 信号量(sem_req/sem_ack)实现跨任务 / 跨层级的同步与数据传递。
2. 核心模块拆解
2.1 全局变量与数据结构(通信载体)
cpp
// MMC控制块:管理"中间层-驱动层"的内存和同步(MMC=Memory Control Block)
mmc_ctrl_stru midlayer_sample_tempraure_mmc_ctrl; // 温度采集MMC
mmc_ctrl_stru midlayer_sample_bright_mmc_ctrl; // 亮度采集MMC
mmc_ctrl_stru midlayer_switch_light_mmc_ctrl; // 灯光开关MMC
mmc_ctrl_stru midlayer_switch_fan_mmc_ctrl; // 风扇开关MMC
// 采集数据结构体:存储温度/亮度的原始数据(中间层<->驱动层共享)
midlayer_sample_temprature_stru midlayer_sample_temprature_values;
midlayer_sample_bright_stru midlayer_sample_bright_values;
// 开关控制结构体:存储灯光/风扇的开关状态(中间层<->驱动层共享)
midlayer_switch_light_stru midlayer_switch_light_sw;
midlayer_switch_fan_stru midlayer_switch_fan_sw;
// FreeRTOS任务句柄:用于任务管理(挂起/恢复/删除等)
TaskHandle_t MidLayer_Sample_Process_Task_Handler;
TaskHandle_t MidLayer_Switch_Process_Task_Handler;mmc_ctrl_stru 是核心封装:用于管理任务 / 模块间的 "共享内存 + 同步信号量",是跨模块通信的核心载体。
| 成员名 | 类型 | 作用 |
|---|---|---|
sem_req |
SemaphoreHandle_t |
请求信号量:发起方释放此信号量,通知接收方 "有请求需要处理" |
sem_ack |
SemaphoreHandle_t |
应答信号量:接收方处理完请求后,释放此信号量通知发起方 "处理完成" |
p_shared_mem |
void * |
共享内存指针:指向双方共用的数据缓存区(用于传递参数 / 结果) |
shared_mem_byte |
int |
共享内存的字节大小:确保双方对内存的读写不会越界 |

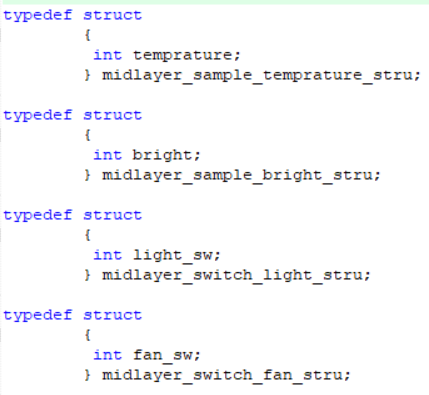
midlayer_xxx_stru:定义具体的 "数据传输格式",与mmc_ctrl_stru的p_shared_mem配合使用,实现结构化数据的传递。
| 结构体名 | 成员名 | 类型 | 作用 |
|---|---|---|---|
midlayer_sample_temprature_stru |
temprature |
int |
存储温度采集结果(中间层与驱动层之间传递) |
midlayer_sample_bright_stru |
bright |
int |
存储亮度采集结果(如 AP3216C 传感器的环境光数据) |
midlayer_switch_light_stru |
light_sw |
int |
存储灯光开关状态(0=关,1=开,用于控制 Modbus 继电器) |
midlayer_switch_fan_stru |
fan_sw |
int |
存储风扇开关状态(与灯光逻辑一致) |
上层模块(如业务层)通过mmc_ctrl_stru的sem_req发起请求,并将参数写入p_shared_mem;
下层模块(如中间层 / 驱动层)等待sem_req,读取p_shared_mem的参数后执行操作,再将结果写回p_shared_mem,最后释放sem_ack;
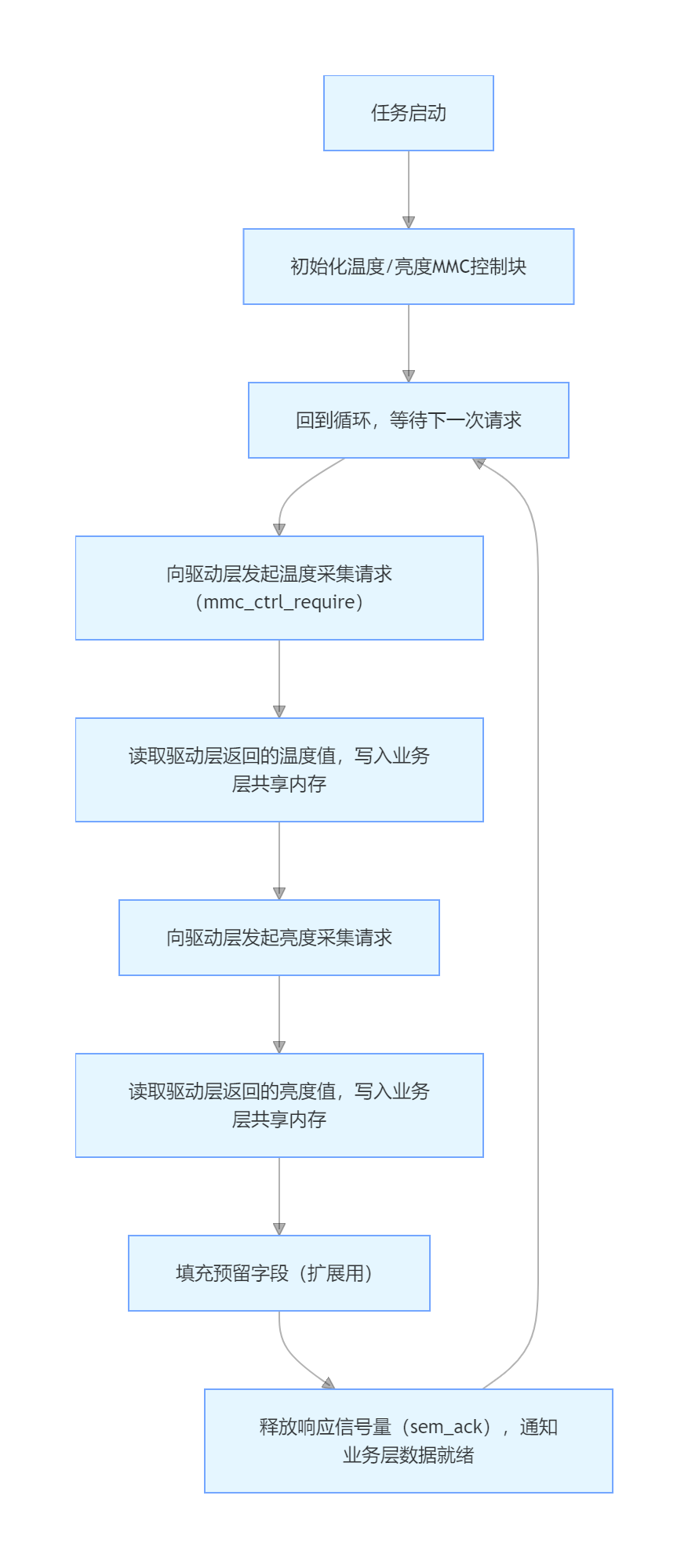
2.2 传感器采集任务:midlayer_sample_process_task_entry
核心作用:响应顶层业务的 "数据采集请求",调用底层采集驱动获取温度 / 亮度数据,返回给业务层。
cpp
// 1. 等待业务层的采集请求(portMAX_DELAY=无限等待,直到信号量可用)
xSemaphoreTake(busi_sample_mmc_ctrl.sem_req, portMAX_DELAY);
// 2. 向驱动层发起温度采集请求(MMC_DELAY_TIME=请求超时时间)
if(mmc_ctrl_require(&midlayer_sample_tempraure_mmc_ctrl, MMC_DELAY_TIME) == pdPASS) {
// 3. 把驱动层的温度数据,拷贝到业务层的共享内存
((busi_sample_stru *)(busi_sample_mmc_ctrl.p_shared_mem))->temprature =
((midlayer_sample_temprature_stru *)(midlayer_sample_tempraure_mmc_ctrl.p_shared_mem))->temprature;
log_i("temprature : %d", ...); // 打印调试
}
// 4. 同理处理亮度采集...
// 5. 填充预留字段(为后续扩展传感器预留)
((busi_sample_stru *)(busi_sample_mmc_ctrl.p_shared_mem))->reserved[0] = 1;
((busi_sample_stru *)(busi_sample_mmc_ctrl.p_shared_mem))->reserved[1] = 2;
((busi_sample_stru *)(busi_sample_mmc_ctrl.p_shared_mem))->reserved[2] = 3;
((busi_sample_stru *)(busi_sample_mmc_ctrl.p_shared_mem))->reserved[3] = 4;
// 6. 释放响应信号量,通知业务层:采集完成,数据已就绪
xSemaphoreGive(busi_sample_mmc_ctrl.sem_ack);核心函数 mmc_ctrl_require:中间层向驱动层发起 "采集请求" 的封装,内部通常会:
把采集参数写入共享内存;
释放驱动层的信号量,触发驱动层执行采集;
等待驱动层的响应信号量,超时返回失败;
共享内存转换:(busi_sample_stru *)(p_shared_mem) 是强制类型转换,把通用指针转为业务层结构体指针,实现数据传递。
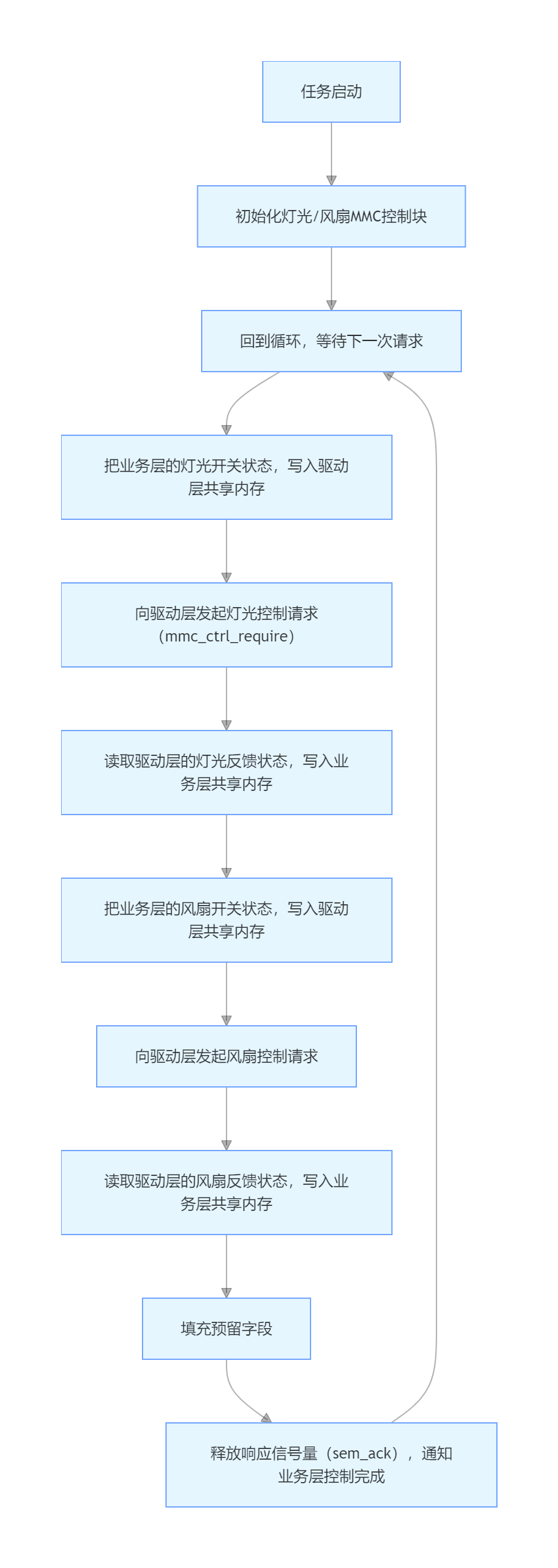
2.3 设备开关控制任务:midlayer_switch_process_task_entry
核心作用:响应顶层业务的 "开关控制请求",调用底层开关驱动控制灯光 / 风扇,获取驱动层的执行反馈,返回给业务层。
与采集任务的差异:
cpp
// 1. 先把业务层的灯光状态,同步到驱动层的共享内存
((midlayer_switch_light_stru *)(midlayer_switch_light_mmc_ctrl.p_shared_mem))->light_sw =
((busi_switch_stru *)(busi_switch_mmc_ctrl.p_shared_mem))->light_status;
// 2. 发起灯光控制请求,驱动层执行"开/关"操作
if(mmc_ctrl_require(&midlayer_switch_light_mmc_ctrl, MMC_DELAY_TIME) == pdPASS) {
// 3. 读取驱动层的执行反馈(比如继电器是否真的吸合),返回给业务层
((busi_switch_stru *)(busi_switch_mmc_ctrl.p_shared_mem))->light_status =
((midlayer_switch_light_stru *)(midlayer_switch_light_mmc_ctrl.p_shared_mem))->light_sw;
}控制任务的核心差异:先 "下发控制指令"(业务层→驱动层),再 "读取执行反馈"(驱动层→业务层),确保控制指令被正确执行;
反馈机制:避免 "业务层发了开灯光命令,但驱动层执行失败" 的情况,提升可靠性。
2.4 中间层初始化函数:midlayer_init
核心作用:初始化底层驱动,创建中间层任务,是中间层的入口函数。
cpp
void midlayer_init()
{
SwitchDrv_Init(); // 初始化开关驱动(灯光/风扇)
SampleDrv_Init(); // 初始化采集驱动(温度/亮度)
// 创建采集任务:栈大小128字,优先级2
xTaskCreate(midlayer_sample_process_task_entry, "midlayer_sample_process_task", 128, NULL, 2, &MidLayer_Sample_Process_Task_Handler);
// 创建开关控制任务:栈大小128字,优先级2
xTaskCreate(midlayer_switch_process_task_entry, "midlayer_switch_process_task", 128, NULL, 2, &MidLayer_Switch_Process_Task_Handler);
}__weak 修饰的驱动初始化函数:__weak void SwitchDrv_Init(); 是 "弱定义",允许驱动层提供 "强定义" 的实现,若驱动层未实现则为空(避免编译错误);
任务栈大小:128 字(512 字节)