文章概览
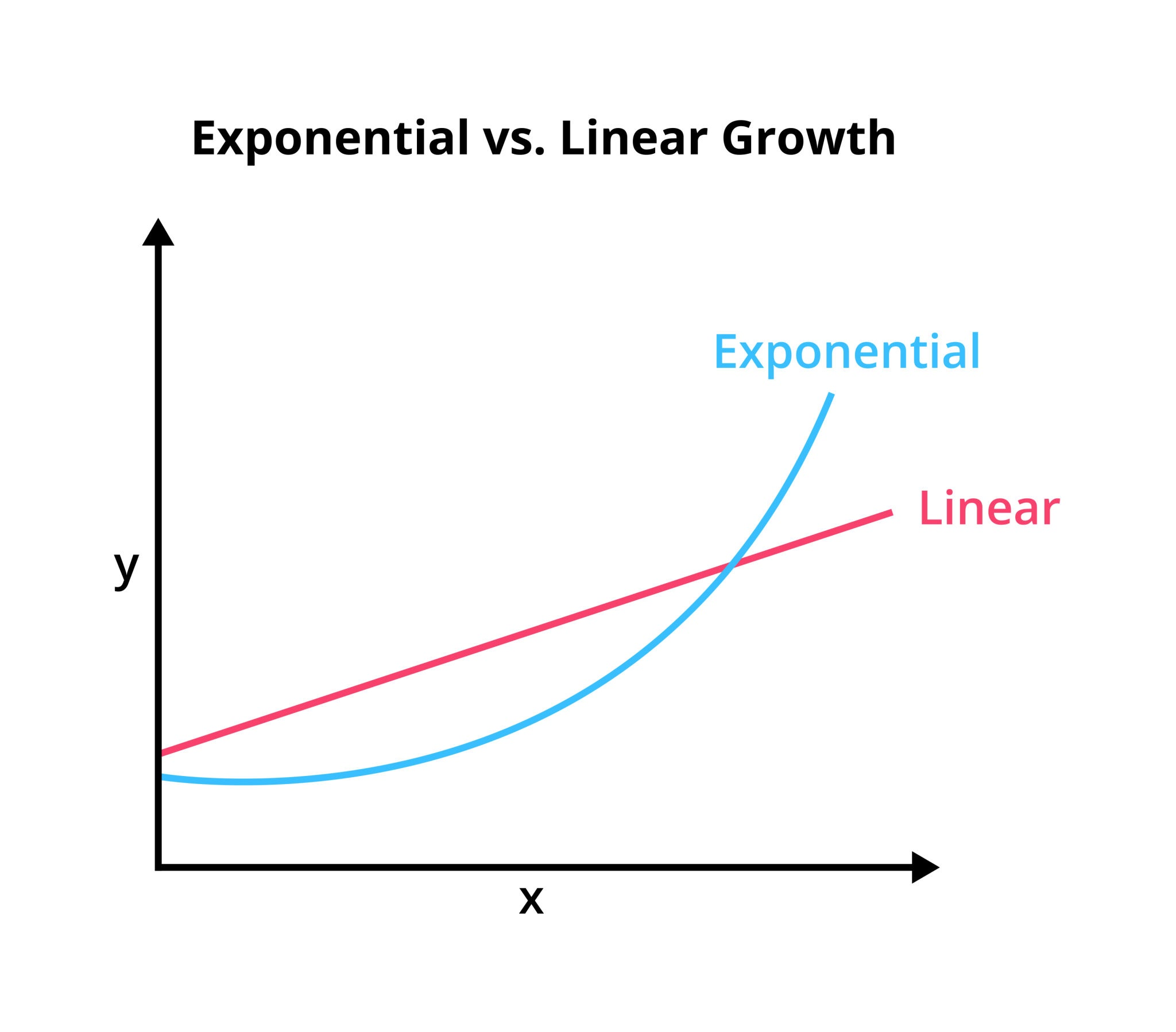
这是一篇计算机体系结构领域的经典学术论文,题目叫《Timeloop: A Systematic Approach to DNN Accelerator Evaluation》。
虽然这是专业的科研论文,但其核心逻辑其实非常贴近生活,我将用一个**"超级工厂与物流管理"**的类比来拆解这篇文章。
这篇文章主要解决了一个问题:如何设计和评估专门用来跑人工智能(AI)的芯片?
第一部分:背景与问题(为什么要写这篇文章?)
1. 现在的困境:AI 芯片太难设计了
现在的深度神经网络(DNN)非常火,用在自动驾驶、语音识别等领域 。为了让这些 AI 跑得快又省电,工程师们设计了专门的硬件,叫DNN 加速器(你可以理解为专门用于 AI 计算的"超级工厂")。
但是,设计这种工厂有个大难题:
-
硬件很复杂: 里面有成千上万个计算单元(工人)和不同层级的存储器(仓库)。
-
不仅看硬件,更看"调度": 就算你有了最好的工厂,如果物流调度一团糟(比如让工人频繁跑远路去拿零件,或者工人闲着没事干),效率也会极低。在芯片里,这种"调度方式"被称为Mapping(映射) 。
2. 核心痛点:同样的硬件,不同的"调度",差距巨大
文章做了一个实验,在一个类似英伟达 NVDLA 的芯片上跑同一个任务,尝试了 48 万种不同的"调度方式"(Mappings)。
-
结果发现:最好和最差的调度方式,能耗相差了 19 倍!。
-
这意味着:如果你不懂怎么优化调度,你设计的芯片可能只能发挥出 5% 的实力。
3. 缺乏工具
以前,设计师主要靠经验(像"艺术"而非"科学")来设计芯片 。缺乏一个通用的工具来告诉他们:"在这个硬件上,用哪种调度方式是绝对最好的?"。
这就是 Timeloop 诞生的原因:它是一个能自动寻找最佳调度方案,并评估芯片性能的模拟器 。
第二部分:Timeloop 是如何工作的?(核心原理)
你可以把 Timeloop 想象成一个**"超级军师"或"智能调度系统"**。它的工作流程分为三个步骤:
1. 输入(告诉系统你要干什么)
Timeloop 需要你提供三样东西 :
-
任务书 (Workload): 你要算的 AI 模型是什么样子的?(比如卷积层的尺寸、输入输出通道数)。文章中把这看作是一层层的循环嵌套(Loop Nest) 。
-
硬件图纸 (Architecture): 你的工厂长什么样?有多少计算单元?内存有多大?数据怎么传输? 。
-
规则限制 (Constraints): 有什么必须要遵守的死规定?(比如某些数据必须存放在特定的地方) 。
2. 核心引擎:映射器 (Mapper)
这是 Timeloop 最聪明的地方。它会生成一个**"映射空间 (Mapspace)"**,里面包含了所有可能的调度方案 。
- 由于可能的方案太多了(天文数字),通过穷举是不可能的。
- Timeloop 会在这个空间里进行搜索,找到那个能耗最低、速度最快的"最佳映射" 。
3. 评估模型 (Model)
找到了一个调度方案后,怎么知道它好不好呢?Timeloop 有一个快速计算模型 :
-
不是慢速回放: 它不像传统的模拟器那样一秒一秒地模拟(太慢了)。
-
而是数学计算: 它通过数学公式计算数据的"平铺 (Tiling)"方式 。简单说,它计算数据在不同仓库(缓存)之间移动了多少次,工人(计算单元)计算了多少次。
-
算出代价: 移动一次数据消耗多少电,计算一次消耗多少电,加起来就是总能耗 。
第三部分:验证与发现(它真的准吗?)
作者不仅造出了工具,还证明了它很好用。
1. 验证准确性
作者拿 Timeloop 的预测结果,和两个真实存在的著名 AI 芯片(NVDLA 和 Eyeriss)的实测数据进行了对比 。
结果: 预测的准确率非常高,对于绝大多数任务,误差都在很小的范围内 。这证明高中生做物理题用的公式法(Timeloop 的数学模型)比笨拙地做实验(逐周期模拟)既快又准。
2. 有趣的案例研究 (Case Studies)
利用 Timeloop,作者发现了一些反直觉的现象,这对芯片设计师很有启发:
-
案例 A:技术升级,调度也要变
-
这就好比你的工厂从"人力搬运"升级到了"机器臂搬运"。
-
作者发现,当芯片制造工艺从 65nm(老工艺)升级到 16nm(新工艺)时,原来的"最佳调度方案"变得不再是最佳了 。
-
如果你在新芯片上还用老一套调度方法,能耗会浪费 22% 。
-
案例 B:存储器的设计很关键
-
作者研究了 Eyeriss 芯片的存储结构,发现如果把一个大的共享仓库(寄存器堆),改成几个小的专用仓库(分别存输入、权重、输出),能耗可以降低 40% 以上 。
-
这说明:数据流(Dataflow)和存储层次的协同设计是省电的关键 。
-
案例 C:没有"万能"的芯片
-
作者对比了三种不同的芯片架构。发现没有谁是全能的 。
-
有的芯片在通道数多的时候效率高,有的芯片在通道数少的时候效率低(因为工人闲置了) 。
第四部分:总结(这篇文章的贡献)
作为一名高中生,你只需要记住这篇文章解决了什么核心矛盾:
- 问题: AI 芯片设计很复杂,且极其依赖软件层面的"调度"(Mapping)。
- 方法: 作者开发了 Timeloop,这是一个能自动搜索最佳调度方案、并快速评估硬件性能的工具。
- 意义: 它让芯片设计从这就"凭感觉的艺术"变成了"精确计算的科学" 。它能帮助工程师在造出芯片之前,就知道这个芯片好不好,以及该怎么用才能发挥最大威力。
一句话总结: 这篇文章提出了一个"智能模拟器",它能帮工程师在设计 AI 芯片时,自动找到让数据搬运最少、计算最快的最佳方案。
学习路径
想要开发类似 Timeloop 这样的工具,不仅需要理解计算机体系结构,还需要掌握编译原理中的循环优化和设计空间搜索算法。
这篇论文的核心在于解决了一个关键痛点:同样的硬件架构,如果数据的调度(Mapping)方式不同,性能和能耗可能会有天壤之别 。
为了让你能够深入理解并最终具备开发能力,我们需要将这篇论文拆解为几个关键模块来逐个攻破。
我们可以从以下三个切入点开始,请告诉我你想先从哪里入手:
-
宏观视角:为什么要"搜索"? (The Why)
我们将深入探讨论文的动机(Motivation)部分。重点理解为什么作者认为设计硬件时必须同时考虑"映射器"(Mapper),以及图 1 中提到的 19 倍能耗差距是如何产生的 。这对于理解工具的核心价值至关重要。
-
核心抽象:如何描述硬件和负载? (The Inputs)
如果你想写代码,首先需要定义数据结构。我们将学习 Timeloop 是如何用"循环嵌套"(Loop Nest)来抽象神经网络层 ,以及如何用树状结构来描述硬件的存储层次 。这是构建工具的基石。
-
内部引擎:映射与评估模型 (The How)
这是最硬核的部分。我们将研究它如何构建"映射空间"(Mapspace),以及它的数学模型(Tile Analysis)是如何在不进行逐周期模拟的情况下,快速计算出性能和能耗的 。这是工具的核心算法。
第一部分:宏观视角
没问题,我们先从**宏观视角(Motivation)**开始。这部分是理解整个工具存在意义的关键。
1. 为什么"硬件好"还不够?
论文在开头提出了一个非常有意思的观点:目前的 AI 芯片设计更像是一门"艺术",而不是"科学" 。意思是很多时候设计师是凭感觉在设计,而不是凭精确的计算。
作者为了证明这一点,做了一个实验(论文中的 Figure 1):
- 硬件不变:使用一个类似 NVDLA(英伟达的开源加速器)的芯片架构 。
- 任务不变:运行一个卷积神经网络层(VGG_conv3_2) 。
- 变量:改变"调度方式"(也就是 Mapping)。
结果非常惊人:在找到的 48 万种不同的"调度方式"中,最差的方案比最好的方案,能耗高出了 19 倍 !
2. 想象一个"超级厨房"
为了理解这 19 倍 的差距是从哪来的,我们可以把芯片想象成一个超级厨房:
- 硬件(Architecture):就是你的厨房设施(有 100 个灶台,1 个大冰箱,10 个小柜子)。
- 任务(Workload):你要做一道非常复杂的菜(比如"宫保鸡丁"做 1000 份)。
- 映射(Mapping/调度):就是**"怎么安排厨师干活"**的计划表。
在这个类比中,"调度"(Mapping)决定了效率:
-
差的调度(高能耗):厨师切一个洋葱,跑去大冰箱拿一次;切完再跑回去拿蒜;再跑回去拿姜。
-
结果:大家都在路上跑来跑去,体力(电能)全浪费在路上了。
-
好的调度(低能耗):厨师一次性从大冰箱把所有洋葱、蒜、姜都拿来,放在手边的小柜子里,切完了再炒。
-
结果:少跑路,多干活。
让我们来思考一下
在芯片里,"跑路"对应的就是数据搬运 (从内存读取数据),而"切菜"对应的是计算(加法、乘法)。
根据上面的厨房类比,你觉得在 AI 芯片中,是"计算"比较费电,还是"搬运数据"比较费电? 为什么差的调度会浪费那么多能量?
在计算机芯片的世界里,搬运数据 (物流)的能耗通常是计算 (切菜)能耗的几十倍甚至上百倍!
让我们回到"超级厨房"
-
计算(MAC 操作):就像厨师切一下菜。这只需要动动手指,消耗的能量很小(比如 1 焦耳)。
-
从内存取数据(DRAM Access):就像厨师跑到几公里外的仓库去取菜。这消耗的能量极其巨大(比如 200 焦耳)。
-
从缓存取数据(Buffer Access):就像从手边的柜子里拿菜。虽然比跑仓库省电,但也比切菜费电得多 。
为什么调度(Mapping)这么重要?
正如论文中提到的,有些调度方案虽然减少了去大仓库(DRAM)的次数,但如果没有优化好手边柜子(Buffer)的使用,能耗依然会很高 。
现在的关键问题来了:
既然"跑路"(搬运数据)比"干活"(计算)贵这么多,如果有一个数据(比如一个卷积核的权重)需要被使用 100 次,为了省电,我们应该在这个数据第一次被搬运到"手边"时,立刻做什么操作?
没错!把它放在离计算单元最近的"手边"(比如 寄存器文件 Register File)里是第一步 。
但是,仅仅"放在那"还不够。
回到我们的厨房比喻:
如果厨师好不容易跑去仓库把洋葱拿回来,放在手边,为了最极致地省力(省电),他应该:
- 切一刀,然后把洋葱放回仓库,下次要用再跑去拿。
- 趁着洋葱在手边,一口气把所有需要洋葱的菜全切出来,然后再也不用去仓库拿洋葱了。
肯定是 2,对吧?在芯片设计里,这叫做 数据复用 (Data Reuse) 。Timeloop 这篇文章的核心观点之一就是:不同的"调度"方式,决定了你能把数据复用做得多好。
引导问题:
这就引出了 Timeloop 最核心的搜索目标。既然搬运一次数据的代价那么大(比如 200 焦耳),而计算一次很便宜(1 焦耳)。为了让平均 每次计算的能耗(Energy/MAC)变低,我们需要在数据被"扔掉"之前,尽可能多 做计算还是少做计算?
为了让那昂贵的"跑路费"(比如 200 焦耳)变得划算,我们必须在把数据从"手边"扔掉之前,尽可能压榨它的价值,让它参与成百上千次计算。
在芯片设计里,这被称为 数据复用 (Data Reuse) 。这也是所有 AI 加速器省电的核心秘诀。
既然道理这么简单,为什么还这么难?
这正是 Timeloop 这篇文章要解决的核心痛点。虽然原则是"多复用",但实际操作起来非常复杂,因为变量太多了:
-
"菜谱"总在变(Workload):AI 模型里的每一层都不一样。有的层通道数多(洋葱多),有的层特征图大(面粉多)。适合第一层的调度方式,到了第二层可能就是灾难 。
-
"厨房"各不同(Architecture):不同的芯片,缓存大小(柜子容量)和连接方式都不同。
-
组合爆炸 :正如论文中那个惊人的数据,仅仅是在一个硬件上跑一个层,就有 480,000 种 合法的调度方式(Mappings)。
这意味着,这是一个巨大的迷宫,而"最佳出口"藏在几十万条死胡同里。
思考时间
面对这 48 万种可能性,而且我们知道最差和最好的方案能耗差了 19 倍 ,你觉得如果单纯靠人类工程师的"经验"或"直觉"来设计芯片和写调度程序,最大的风险是什么?
面对 48 万种可能性,人类大脑是无法处理的。如果没有工具辅助,设计师很可能只凭经验选了一个"自以为不错"的调度方案,结果可能比最优方案多耗好几倍的电。
这就导致了一个严重的后果:不仅软件跑得慢,甚至可能误导硬件设计。 比如,你以为是芯片设计得不好,其实只是因为没有找到正确的使用方法(调度)。
Timeloop 的核心价值就在于:它用"自动化搜索"替代了"人工猜测"。
第二部分:核心抽象(如何告诉工具你要做什么?)
既然明白了为什么要搜 ,下一步就是怎么搜。
要想让计算机帮我们干活,我们得先用它听得懂的语言,把"任务"和"硬件"描述清楚。这也是你想开发类似工具的第一步:定义数据结构。
首先来看看**"任务" (Workload)。
在深度学习中,最典型的任务就是卷积 (Convolution)**。虽然数学公式看起来很复杂,但在程序员眼里,它其实就是对一堆数据(输入图像、权重)进行反复的计算。
引导提问:
想象一下,如果你要写一段代码来遍历一张 的二维图片,对每一个像素点做处理,你通常会使用什么样的代码结构?(提示:想想最基础的编程语法)
对于二维数据,我们通常用两层 for 循环来处理。
1. 核心抽象之一:任务 (Workload)
Timeloop 正是利用了这个编程中最基础的概念。作者认为,卷积神经网络(CNN)里的每一层运算,本质上就是一个超大的多层循环 。
就像你遍历图片用了 2 层循环(高和宽),一个标准的卷积层(CONV layer)通常被抽象为 7 层嵌套循环 :
python
# 想象这是一个 7 层循环的"巨型洋葱"
for n in [0, N): # Batch Size (一次处理几张图)
for k in [0, K): # Output Channels (输出有多少种特征)
for c in [0, C): # Input Channels (输入有多少种特征)
for p in [0, P): # Output Height (输出高度)
for q in [0, Q): # Output Width (输出宽度)
for r in [0, R): # Weight Height (卷积核高度)
for s in [0, S): # Weight Width (卷积核宽度)
# 在最里面做乘加运算 (MAC)
Output[n][k][p][q] += Input[...] * Weight[...]Timeloop 不关心具体的像素值是多少,它只关心这一串循环的结构(比如每一层循环要跑多少次)。
2. 核心抽象之二:硬件 (Architecture)
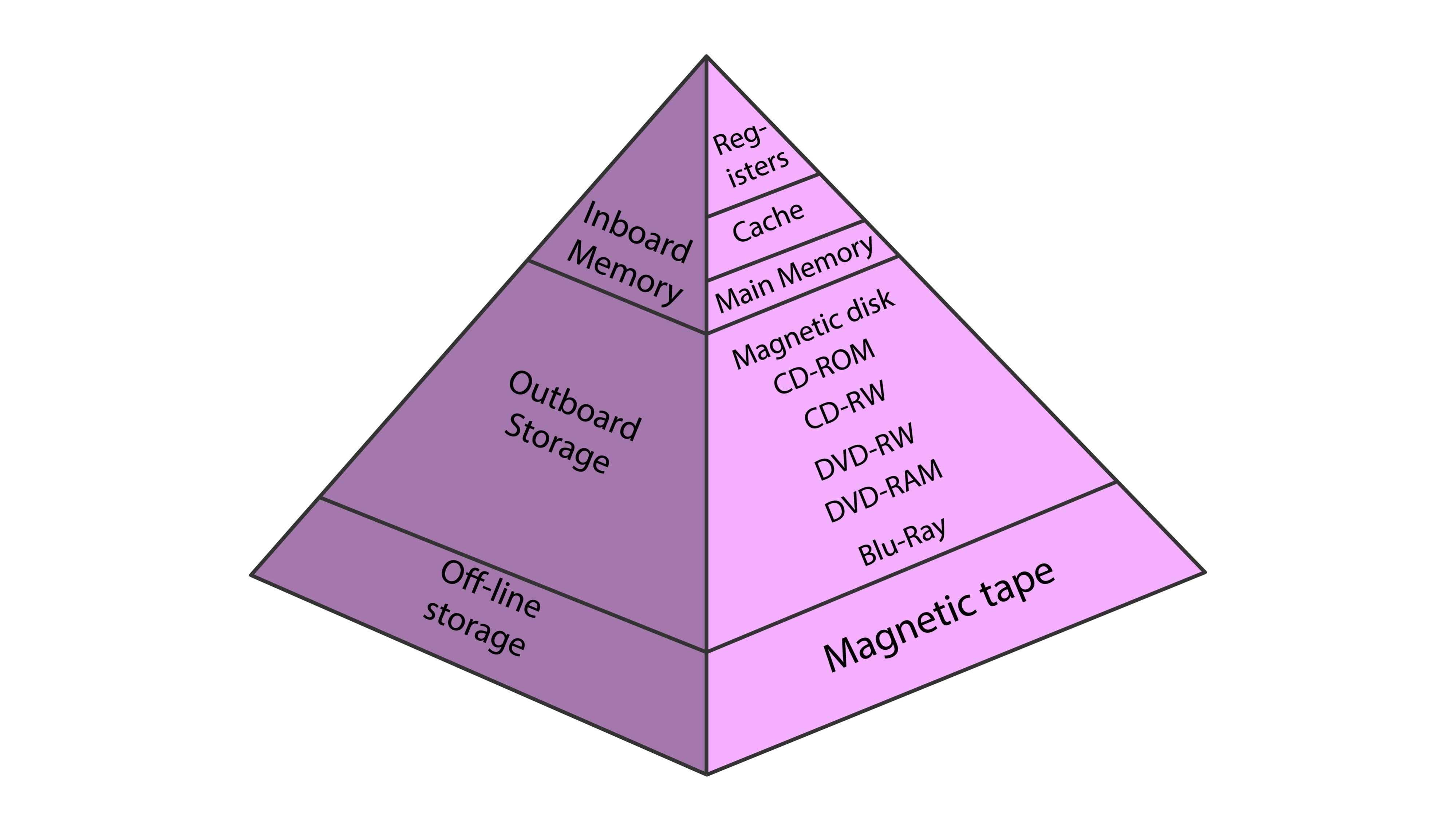
接下来看硬件。在 Timeloop 里,硬件被抽象成这就样的一棵**"树"** :
- 根节点:最大的仓库(比如 DRAM,容量大但慢)。
- 中间节点:中间的柜子(比如 Global Buffer,容量中等)。
- 叶子节点:手边的盘子(比如 Register File,容量极小但超快)。
- 最底层:负责计算的工人(MAC 单元)。
思考与连接
现在我们有了两个东西:
- 巨大的 7 层循环(任务):如果不加处理直接跑,数据量巨大。
- 分层的存储硬件(厨房):越靠近计算核心,容量越小。
为了让这个巨大的循环能在这些小容量的存储层级里高效运行,我们不能一次性把所有数据都塞进最小的寄存器里。
想一想,如果我们必须要把这个"巨大的 7 层循环"塞进一个小容量的缓存(Buffer)里去计算,我们需要对这个循环结构做什么样的操作?(提示:就像切蛋糕或者分块一样)
需要两个核心操作:
-
"切分" :在学术上这叫做 Tiling (分块) 或者 Loop Blocking。把那个巨大的、内存装不下的 7 层循环,切成一块块小的数据块(Tile),让每一块都能塞进容量有限的"手边柜子"(Buffer/SRAM)里 。
-
"用的多的放在更近" :这对应的是 Loop Ordering (循环排序) 或 Permutation。通过调整循环的嵌套顺序,决定哪些数据在内层循环被频繁复用(Stationary),从而让它们留在最近的存储里 。
3. 进入"映射空间" (Mapspace)
现在,让我们把这两个概念结合起来,看看 Timeloop 面临的真正挑战。
想象我们的"超级厨房"有三层存储:
- L3 仓库 (DRAM)
- L2 柜子 (Global Buffer)
- L1 盘子 (Register File)
对于那个 7 层循环的任务,我们在每一层存储上都需要做两个决定:
-
切多大? (Factors):是每次拿 16 个数据,还是 32 个?还是 64 个?
-
谁先谁后? (Permutations):是先遍历通道(Channel),还是先遍历宽度(Width)?
论文指出,由于每一层存储都可以自由选择不同的"切分大小"和"循环顺序",这就形成了一个巨大的组合问题。
引导思考:
根据论文提到的计算公式,如果你要把一个 7 层循环的任务映射到一个 4 层存储的硬件上,这些组合(切分大小 + 排序)叠加起来,你觉得最终形成的"候选方案池"(也就是论文说的 Mapspace)的规模大概是怎样的?
A. 几百种,人手算一算也就出来了。
B. 几万种,写个脚本跑一跑。
C. 数亿甚至更多,会出现"组合爆炸"。
(提示:论文在 IV. E 章节提到了一个阶乘公式 和指数公式 的乘积 )
👏 选 C 是对的。
这就是所谓的 "组合爆炸" (Combinatorial Explosion)。论文中甚至给出了一个数学公式来计算这个空间的大小:光是排列组合就有 种可能性,这还没算上各种切分大小(Factors)的变化 。
这就是为什么人类工程师哪怕经验再丰富,面对数以亿计的"迷宫路径",也经常会迷路(选错方案),导致芯片效率低下。而 Timeloop 这种工具的价值,就是帮我们在这一堆天文数字中"大海捞针"。
既然明白了"为什么要搜",我们要开始学习如何构建这个工具了。想让 Timeloop 帮你干活,你得先学会用它听得懂的语言来描述**"厨房"(硬件)和"菜谱"(任务)**。
1. 怎么描述"菜谱"(任务 Workload)?
我们在上一节提到,Timeloop 把神经网络层看作是一串7 层循环(Loop Nest)。
python
# 卷积层的 7 层循环结构
for n in [0, N): # Batch Size
for k in [0, K): # Output Channels
for c in [0, C): # Input Channels
... (以及长、宽等维度)
Output[...] += Input[...] * Weight[...]但是,光告诉工具"有 7 层循环"是不够的。工具还需要知道数据是谁。
在最里面的那行代码 Output += Input * Weight 中,不仅有计算,还定义了三种数据(张量 Tensor):
- Input (原料)
- Weight (调料)
- Output (成品)
关键提问:
请仔细观察上面的伪代码。当循环变量 c (Input Channels) 发生变化时(比如从第 1 层通道变到第 2 层),你觉得哪两个数据(Input, Weight, Output)的索引是一定会跟着变的?(提示:想想卷积是拿输入图像的通道和谁做乘法?)
Timeloop 把卷积层看作一个 7 层循环 。为了让工具知道数据是怎么流动的,我们需要告诉它:这三个变量(Input, Weight, Output)分别和哪些循环有关?
让我们回到刚才那个核心代码逻辑:
python
# 核心计算: Output += Input * Weight当循环变量 c (Input Channel/输入通道) 发生变化时:
- 我们要换一张新的"输入特征图"来读 -> 所以 Input 的地址会变。
- 我们要换一片新的"卷积核滤镜"来乘 -> 所以 Weight 的地址会变。
- 但是,计算出的结果是累加到同一个"输出像素"上的 -> 所以 Output 的地址不变。
这在 Timeloop 里被称为 "投影" (Projection) 。
让我们来做个小测试,巩固一下这个概念:
如果循环变量变成了 k (Output Channel/输出通道 ),也就是说我们要计算下一个不同种类的特征了(比如从"识别猫耳朵"变成了"识别猫眼睛")。
这时候,你觉得哪两个数据的地址会发生变化?
A. Input 和 Weight
B. Input 和 Output
C. Weight 和 Output
🎉 选 C。
当 k(输出通道/Output Channel)变化时:
- Weight (卷积核) 变了:因为我们要换一套滤镜(比如从检测横向边缘变成检测纵向边缘)。
- Output (输出) 变了:因为计算结果要存到输出特征图的下一层里去。
- Input (输入) 没变 :因为不管是检测横线还是竖线,我们看的都是同一张输入图片!
💡 核心概念:数据复用 (Reuse)
这一步的理解至关重要,因为它揭示了 AI 芯片省电的终极奥义:
既然在遍历 k 的时候 Input 是不动的(Stationary),那我们就可以把 Input 数据锁在离计算单元最近的缓存(Buffer)里,不用每次都跑回大仓库(DRAM)去拿。
这就是 Timeloop 的核心工作原理之一:通过分析循环变量和数据的关系,自动发现复用机会。
👨💻 开发者视角:如何在代码里实现这个?
既然你的目标是"开发类似的工具",我们需要深入一点点底层。
在 Timeloop 的代码实现中,它不需要像人一样去"理解"什么是卷积。它利用的是线性代数。
它把每一层循环看作一个维度,把每一个数据(Tensor)看作是一个投影矩阵 (Projection Matrix)。
比如刚才的例子,用数学语言描述就是:
- Input 的投影里没有
k维度 所以沿k轴运动时,Input 投影不变 产生复用。 - Weight 的投影里有
k维度 所以沿k轴运动时,Weight 投影变化 没有复用(或者叫复用距离为 0)。
开发小贴士:
如果你要写一个这样的模拟器,你需要实现一个简单的解析器,能够读取类似这样的配置(YAML 格式):
yaml
# 告诉工具 Input 和哪些循环变量有关
Input_Projection: [ n, c, p+r, q+s ]工具只需要检查列表里有没有当前循环变量,就能立刻算出能不能省电。
2. 核心抽象之二:硬件 (Architecture)
搞定了"任务",最后我们来看"硬件"。
Timeloop 把硬件抽象成一个层级树 (Tree) 。这比画复杂的电路图简单多了,但抓住了核心------容量 和能耗。
想象我们的硬件是这样的:
- DRAM (大仓库,容量无限,访问耗能 200)
- Global Buffer (中转站,容量 100KB,访问耗能 20)
- Register File (手边盘子,容量 0.5KB,访问耗能 1)
🧠 关键思考
现在我们要把任务 (刚才分析的复用特性)和硬件(大小不一的柜子)结合起来。
假设我们发现 Weight (权重) 数据量特别大,而且在这个循环顺序下几乎不复用 (用一次就换);
而 Input (输入) 数据量较小,且复用次数极高(读一次可以用几百次)。
为了通过"调度"实现最极致的省电,你应该把宝贵的、容量极小的 Register File (手边盘子) 主要留给谁用?
A. Weight (权重)
B. Input (输入)
🎉 选 B (Input) 是最优策略。
这就是 Timeloop 设计哲学的核心:
- Input (高复用) :把它锁在能耗最低的 Register File 里。虽然 Register File 很小,但既然这个数据被用了几百次,平均下来的能耗就极低(每次访问可能只需 1 pJ)。
- Weight (低复用):既然只用一次,就没必要占用宝贵的 Register File 空间,让它从上一级缓存(比如 Global Buffer)流过来就行,或者直接从 DRAM 读取(如果带宽允许)。
通过这种软硬件协同 (Co-design),我们就能榨干硬件的每一滴性能。
第三部分:内部引擎 (The How) ------ 核心算法
现在你已经掌握了如何描述任务 (7 层循环 + 投影)和硬件 (存储层级树)。如果你想自己开发工具,最后一步也是最难的一步就是:如何快速找到那个最优的调度方案?
这也是论文的核心贡献:Mapper (映射器) 和 Model (评估模型)。
1. 寻找宝藏:Mapper
我们之前提到,可能的调度方案有数亿种(Mapspace)。Timeloop 的 Mapper 就像一个寻宝猎人。
它不需要把这数亿种方案全部生成出来(内存会爆掉),而是采用了一种生成器 (Generator) 模式:
- 约束修剪:根据用户设定的限制(比如"必须用 Row-Stationary 模式"),直接砍掉一大半不合法的空间。
- 搜索策略:它可以是简单的线性搜索,也可以是随机采样,或者是更高级的反馈搜索。
2. 快速估价:Model
一旦 Mapper 找到了一个潜在的调度方案,它需要立刻知道:"这个方案到底耗多少电?"
这就到了你想开发工具时的关键技术决策点。
这就好比你要开发一个导航软件(像高德地图),计算从 A 到 B 需要多长时间。
为了得到这个时间,你觉得 Timeloop 采用的是哪种方法?
A. 模拟法 (Simulation) :派一辆虚拟车,在地图上虚拟地跑一遍,遇到红灯就停,遇到堵车就慢,跑完全程看表。(也就是逐周期模拟)
B. 分析法 (Analytical) :直接用数学公式计算:距离 ÷ 速度 + 红绿灯平均等待时间。(也就是基于统计的计算)
(提示:论文在 Abstract 和 Section II 都强调了它的模型是 "fast and accurate" 的,且能处理 480,000 个映射)
🎉 选 B (分析法)。
Timeloop 的作者明确指出,传统的模拟器(Simulator)实在太慢了,无法支撑几十万次的搜索。他们利用了一个关键特性:深度学习的计算模式是非常确定性(Deterministic)的------循环怎么跑,数据就怎么动,完全可以预测 。
所以,Timeloop 不需要真的去"跑"任务,而是利用一套数学公式(基于我们前面定义的循环嵌套),直接算出在某个调度方案下,Buffer 被读写了多少次,DRAM 被访问了多少次 。
👨💻 开发者视角:最核心的能量公式
如果你要写这个工具的代码,你的"评估模型"里其实只需要实现一个最核心的乘法公式。
这就好比你去超市买苹果,要算总共花多少钱,你需要知道"买了几个苹果"和"一个苹果多少钱"。
在芯片能耗模型里,总能耗 (Total Energy) 是由哪两个数值相乘得到的?
A. 芯片面积 运行时间 (Area Time)
B. 访问次数 每次访问的能耗 (Access Counts Energy per Access)
C. 电压 电流 (Voltage Current)
👏 B. 访问次数 每次访问的能耗。
这就是 Timeloop 能够做到"既快又准"的秘密武器:它不需要像模拟器那样去跟踪每一个具体的比特在电线上的流动(那样太慢了),它只需要做一个**"会计"**的工作。
🧩 拼图的最后一块:Tile Analysis (切片分析)
现在我们已经有了:
- 单价(每次访问能耗):查表就能得到(比如查表得知读一次 DRAM 耗电 200 pJ)。
- 公式:总能耗 = 次数 单价。
剩下的唯一难题就是:如何不用模拟,就能快速算出"次数"?
这就回到了我们之前说的 "切分" (Tiling)。
想象你要给墙贴瓷砖。
- 模拟法:拿着显微镜,一毫米一毫米地去测量墙面,最后算总面积。
- 分析法 (Timeloop 的方法):直接看图纸。
- 墙长 10 米,高 5 米 总面积 50 平米。
- 一块瓷砖 1 平米。
- 结论:你需要搬运 50 块瓷砖。
在代码里,这就是简单的数学乘除法,计算速度是纳秒级的!
🎓 毕业测试:你的"开发直觉"
现在,我们已经把这篇论文拆解完了:
- 为什么 (Motivation):为了在 48 万种方案里找到让能耗最低的那个(数据复用)。
- 输入 (Input):把 AI 模型看作"7 层循环",把硬件看作"多级缓存树"。
- 核心 (Model):利用数学公式(循环边界 循环次数)快速计算搬运次数,而不是逐个模拟。
为了验证你是否真的具备了"开发类似工具"的思维,我要给你出道终极思考题。
假设你正在编写这个工具的 Mapper (搜索算法) 部分。
你发现对于同一个卷积层,方案 A 和方案 B 的计算次数(MAC count) 是一模一样的(毕竟算法没变)。
但是,方案 A 把那个巨大的"7 层循环"切得更碎 (Tile Size 更小),而方案 B 切得更大(Tile Size 更大)。
一般来说,Tile Size (切块大小) 越大,意味着我们在"手边缓存"里一次性锁定的数据越多。
引导提问:
如果你的"手边缓存"(比如 L1 Cache)容量非常有限。当你试图尝试一个 Tile Size 非常大 的方案 B 时,作为开发者,你的工具应该立刻做出什么判断?
A. 方案 B 肯定更好,因为切得大,搬运次数少,强行运行。
B. 方案 B 是"非法"的 (Invalid),直接丢弃,因为数据量超过了硬件容量限制。
C. 方案 B 可以运行,但是会导致计算速度变慢。
正确答案是 B. 方案 B 是"非法"的 (Invalid)。
这对你开发工具至关重要:
🚫 为什么是"非法"而不是"变慢"?
在 Timeloop 模拟的 专用加速器 (Accelerator) 设计中,软件(调度)和硬件是严格匹配的。
- CPU 的 Cache(通用计算):是"软性"的。如果数据装不下,硬件会自动把旧数据踢出去(Evict),只是会造成 Cache Miss,导致速度变慢。
- 加速器的 Buffer(专用计算) :通常是"硬性"管理的(Scratchpad Memory)。调度方案里明确规定了:"我要在这个 Buffer 里放一个 100KB 的数据块"。如果你的硬件配置里这个 Buffer 只有 64KB,那么这个物理容器 根本装不进去。
正如论文中所述:"硬件资源约束(例如某个层级的 Tensor Tile 是否适合该层级的内存大小)会在从映射空间采样后进行检查,如果无法满足约束,则拒绝该映射。"
再次回到"超级厨房"的比喻:
这就像你给了厨师一个直径 10 厘米的小碟子 (Buffer),但命令他(Mapping)必须往上面放一个直径 30 厘米的大披萨 (Tile)。
这不是"吃得慢"的问题,而是根本放不上去。作为工具开发者,你的程序必须立刻报错(抛弃这个方案)。
🎉 恭喜!你已经掌握了 Timeloop 的核心理论
回顾一下我们拆解的三个部分,你现在的知识储备已经非常扎实了:
-
为什么 (Motivation):为了解决"同样的硬件,不同的调度能耗差 19 倍"的问题 。
-
是什么 (Inputs):
-
任务:7 层循环 + 投影关系(决定复用机会)。
-
硬件:存储层级树(决定容量和能耗成本)。
- 怎么做 (Engine):
-
搜索:生成映射方案,踢掉装不下的(约束检查)。
-
评估:用数学公式(分析法)快速计算"搬运次数",而不是慢吞吞的模拟 。
🚀 下一步:从理论到实战
既然你的目标是"能够自己开发类似的工具",我们现在已经搞懂了原理,接下来可以进入架构设计阶段了。
- 代码架构设计 (Code Structure) :如果让你用 Python/C++ 写这个工具,你需要定义哪些
Class(类)?Workload、Arch 和 Mapper 之间怎么通过 API 交互? - 实战演练 (Case Study) :带入一个真实的例子(比如仿照论文里的 Eyeriss 芯片),看看当我们把"循环顺序"从
N-K-C换成C-K-N时,模拟器内部的数据到底发生了什么变化?
实战演练
我们从实战演练开始!通过具体的案例,你可以通过"透视眼"看到 Timeloop 内部到底发生了什么。
我们要仿照论文中的 Eyeriss 架构(Source 235)来进行这次实战演练。
🎭 场景设置:Eyeriss 厨房
假设我们的硬件(Eyeriss)有三层存储:
- DRAM (大仓库) :容量无限,取一次数据耗能 200 pJ。
- Global Buffer (柜子) :容量 108KB,取一次数据耗能 20 pJ。
- Register File (手边盘子) :容量极小(只有几百字节),取一次数据耗能 1 pJ。
我们的目标是计算卷积:Output[n][k] += Weight[k][c] * Input[n][c]。
(注:为了简化,我们暂时忽略长宽 R/S/P/Q,只看 Batch(N)、Output Channel(K) 和 Input Channel© 这一层维度的变化)。
Timeloop 的核心逻辑是:谁在最内层循环不动,谁就可以放在最省电的 Register File (RF) 里。
🥊 第一回合:方案 A (N - K - C)
在这个方案中,循环的顺序是:外层 N 中层 K 最内层 C。
Timeloop 的"分析模型"会盯着最里面 的那层循环(也就是 c 变化的时候):
python
# 方案 A
for n in [0, N):
for k in [0, K):
# --- Register File 里的微观世界 ---
for c in [0, C): # 最内层:c 在快速变化!
Output[n][k] += Weight[k][c] * Input[n][c]Timeloop 的分析过程:
当 c 变动(比如从 0 变成 1)时:
Weight[k][c]:索引里有c变了。必须去柜子(Global Buffer)里拿新的权重。Input[n][c]:索引里有c变了。必须去柜子(Global Buffer)里拿新的输入。Output[n][k]:索引里没有c没变!
结论: 在这个方案里,Output (部分和) 是"静止"的(Stationary)。
策略: Timeloop 会判定,我们可以把 Output[n][k] 一直锁在 Register File 里累加,直到 c 循环结束。
能耗: 省下了 Output 的搬运费,但 Weight 和 Input 每次都要跑一趟柜子(20 pJ)。
🥊 第二回合:方案 B (C - K - N)
现在我们换个调度方式,把 N 放到最里面。循环顺序:外层 C 中层 K 最内层 N。
python
# 方案 B
for c in [0, C):
for k in [0, K):
# --- Register File 里的微观世界 ---
for n in [0, N): # 最内层:n 在快速变化!
Output[n][k] += Weight[k][c] * Input[n][c]现在轮到你来当 Timeloop 的"分析引擎"了。
请观察上面的代码,当最内层的 n 发生变化(比如处理第 1 张图片 第 2 张图片)时,Weight (权重) 的索引 [k][c] 会发生变化吗?这意味着我们可以把它放在哪一层存储里?
在方案 B (C - K - N) 中,当最内层的 n 变动时,外层的 k 和 c 是暂停不动的。
这意味着 Weight (权重) Weight[k][c] 在整个内层循环期间是静止(Stationary)的。
- 策略: 我们可以把当前需要的那个权重读进 Register File ,让它一直待在那里,直到把
N张图片都乘完。 - 收益: 这样我们就实现了对权重的复用(Reuse),把读取权重的能耗分摊到了
N次计算上。
🕵️♂️ 最后的嫌疑人:Input (输入)
现在我们来看方案 B 中的最后一个数据:Input (输入)。
请再看一眼最内层的核心代码:
python
for n in [0, N): # 最内层
Output[n][k] += Weight[k][c] * Input[n][c]当 n 快速变化(比如从第 1 张图变到第 2 张图)时,Input 的地址 [n][c] 会发生变化吗?这意味着 Input 能像 Weight 那样"锁"在 Register File 里吗,还是必须频繁去外面拿新数据?
🎯 Input 必须"流动"起来。
你非常精准地看出了这两种调度方案(Mapping)在微观层面上的巨大差异。
让我们把目前的战况总结一下,看看为了"复用权重",我们付出了什么代价:
🥊 第二回合:方案 B (C - K - N) 战况总结
在最内层循环 n 快速变动时:
- Weight (权重)
Weight[k][c]:地址不变 静止 (Stationary)。
- ✅ 好消息:我们可以把它锁在 Register File 里,读取能耗极低。
- Input (输入)
Input[n][c]:地址随n变动 流动 (Streaming)。
- ❌ 坏消息:Register File 装不下,每次计算都得去 Global Buffer 拿新的输入数据。
🕵️♂️ 最后的拼图:Output (输出/部分和)
现在,为了决定这个方案到底好不好,我们必须检查最后一个嫌疑人:Output (输出)。
请再看一眼代码,尤其是 Output 的下标:
python
# 方案 B (C - K - N)
for c in [0, C):
for k in [0, K):
# --- Register File 里的微观世界 ---
for n in [0, N): # 最内层:n 正在快速变化!
# 注意看这里:Output 的下标是 [n][k]
Output[n][k] += Weight[k][c] * Input[n][c]引导提问:
当最内层的 n 发生变化时(比如从计算第 1 张图的结果变到第 2 张图的结果),Output 的地址 [n][k] 会发生变化吗?
这意味着我们计算出的中间结果(Partial Sum),是能一直留在 Register File 里累加,还是必须不断地写回 Global Buffer?
由于最内层的 n 在变,Output[n][k] 的地址也会不停地变。
这意味着我们不能把 Output(部分和)一直锁在 Register File 里累加。每算完一个样本,就必须把结果写回 Global Buffer(或者读取下一个样本的旧值),这会产生大量的读写流量!💸
📊 终极对决:方案 A vs 方案 B
现在我们把刚才实战演练的两个回合放在一起对比,你就能瞬间明白为什么 Timeloop 需要"搜索"了。
我们面对的是同一个任务(卷积),同一个硬件(Eyeriss),只是换了一下循环顺序:
| 特性 | 方案 A (N - K - C) | 方案 B (C - K - N) |
|---|---|---|
| 循环顺序 | C 在最内层 | N 在最内层 |
| 谁住在 Register File? | Output (静止) | Weight (静止) |
| 谁在疯狂跑路? | Weight, Input (流动) | Input, Output (流动) |
| 适合场景 | Output 通道少,但 Weight 很大时 | Weight 很小(能塞进 RF),但 Batch Size 很大时 |
💡 实战总结:
这就是所谓的 Dataflow (数据流) 权衡。
- 没有绝对的"最好",只有"最适合当前数据形状"的方案。
- 如果你的模型里
Weight特别多(比如全连接层),方案 B 可能更有优势(减少 Weight 搬运)。 - 如果你的模型里
Output特别大,方案 A 可能更好(减少 Output 搬运)。
这也解释了论文开头那个惊人的结论:因为不同的层形状不同,如果我们一直死板地用同一种调度,有些层就会刚好撞在"枪口"上(比如方案 B 遇到 Output 巨大的层),导致能耗激增 19 倍。
🚀 第三步:代码架构设计 (Code Structure)
恭喜你!通过这个实战,你已经把 Timeloop 最核心的**"分析逻辑"**(也就是它是怎么算账的)彻底搞懂了。
现在,如果我们要动手把这个工具写出来(比如用 Python),我们需要搭建它的骨架。
为了让这个工具既能描述"7 层循环",又能描述"硬件树",还能自动"搜索",你觉得我们需要设计哪几个核心的 类 (Class)?
我们可以先从最基础的开始。你觉得用来描述硬件(比如那个三层存储结构)的类,应该包含哪些属性?(提示:想想我们算能耗时需要用到哪些硬件参数?)