强化学习入门第一课:核心概念与数学基础详解
本博客讲的类容比较基础,方便零基础同学入门学习。
更专业的讲解,可以参考王树森老师或者赵世钰老师的讲解。
一、什么是强化学习(Reinforcement Learning, RL):
如果你不能直接告诉 AI "该怎么做", 只能靠"奖励"和"惩罚"来引导它------ 它能自己学会打游戏、开小车、下围棋吗?
答案是:能!
这就是强化学习 的神奇之处。
它不像监督学习那样需要"标准答案",也不像无监督学习只找模式,而是模拟生物试错学习的过程:
例如:
小孩摸火 → 烫 → 哭 → 下次不摸
狗狗坐下 → 得零食 → 开心 → 下次更愿坐下
强化学习的智能体(Agent)就是这样,在与环境不断互动中,自己一点点总结出规律,从而明确"什么环境中做什么动作"能获取最高的任务收益。
二、基础铺垫:概率基础(理解随机,概率计算,以及什么是期望)
在强化学习中的一切几乎都是随机的,所以我们先复习概率学中的两个核心概念------概率和期望。
▶ 离散 vs 连续:世界有两种"不确定性"
| 类型 | 名称 | 特点 | 例子 |
|---|---|---|---|
| 离散型 | 概率质量函数(PMF) | 只能取有限/可数值 | 投骰子、抽卡片、选动作 |
| 连续型 | 概率密度函数(PDF) | 可取无限多个实数值 | 机器人手臂角度、车速、温度 |
✅ PMF 例子:袋子里有 10 个球
- 红球 2 个 → 抽中红球概率 = 0.2
- 绿球 5 个 → 概率 = 0.5
- 蓝球 3 个 → 概率 = 0.3
记作:
p ( 红 ) = 0.2 , p ( 绿 ) = 0.5 , p ( 蓝 ) = 0.3 p(\text{红}) = 0.2,\quad p(\text{绿}) = 0.5,\quad p(\text{蓝}) = 0.3 p(红)=0.2,p(绿)=0.5,p(蓝)=0.3
所有可能结果的概率之和 = 1。
PDF 例子:身高分布(高斯分布)
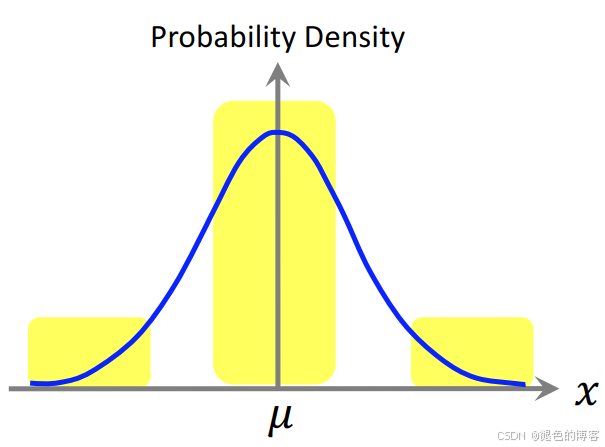
- 平均身高 μ = 170 cm,标准差 σ = 10 cm
- PDF 曲线中间高、两边低:
p ( x ) = 1 2 π σ exp ( − ( x − μ ) 2 2 σ 2 ) p(x) = \frac{1}{\sqrt{2\pi}\sigma} \exp\left(-\frac{(x-\mu)^2}{2\sigma^2}\right) p(x)=2π σ1exp(−2σ2(x−μ)2)
注意:PDF 的纵坐标不是概率,而是"相对可能性";必须对一段区间积分,才是真实概率。
核心工具:期望(Expectation)
一句话定义期望:
期望 = 所有可能结果 × 其发生可能性 的加权平均值
它不是某次具体结果,而是在大量重复实验下,你"最该预期"得到的长期平均水平。
它就像一个"上帝视角"的预言家------不告诉你下一次抽到什么,但能准确预言:如果你玩 10000 次,总分大概会落在哪附近。这就类似于一个围棋高手,即使棋局还没下完,但是仅凭当前残局,就能分析你当前的胜算。
为什么需要「期望」?期望可以帮助我们消除随机变量的影响
我们关心的不再是"某一次结果",而是长期平均表现。
很多人混淆「样本均值」和「期望」。我们用一个例子厘清:
情境:从袋子中抽球(共 10 个)
- 红球 2 个 → 得 10 元
- 绿球 5 个 → 得 5 元
- 蓝球 3 个 → 扣 20 元
【期望】(理论值,固定不变):
这是由规则本身决定的"先天属性" ,只要袋子组成不变,期望就固定:
E R = 0.2 ⏟ 红概率 × 10 + 0.5 ⏟ 绿概率 × 5 + 0.3 ⏟ 蓝概率 × ( − 20 ) = − 1.5 元 \mathbb{E}R = \underbrace{0.2}{\text{红概率}} \times 10 + \underbrace{0.5}{\text{绿概率}} \times 5 + \underbrace{0.3}_{\text{蓝概率}} \times (-20) = -1.5\ \text{元} ER=红概率 0.2×10+绿概率 0.5×5+蓝概率 0.3×(−20)=−1.5 元
无论你玩不玩,这个数都是 -1.5。它是「游戏是否公平」的黄金标准。
【样本均值】(观测值,随次数波动):
这是你实际玩若干局后的算术平均:
- 玩 1 局:抽到红球 → 平均 = +10 元
- 玩 3 局:红、绿、蓝 → 平均 = ( 10 + 5 − 20 ) / 3 = − 1.67 (10 + 5 - 20)/3 = -1.67 (10+5−20)/3=−1.67 元
- 玩 1000 局:可能 ≈ -1.48 元
- 玩 1,000,000 局:≈ -1.5002 元(越来越接近期望!)
当实验次数趋于无穷时,样本均值以概率 1 收敛于期望值。
也就是说------
🔹 期望是「理论极限」
🔹 样本均值是它的「近似估计」
🔹 RL 算法,本质上就是用有限样本去逼近期望价值
1️⃣离散型随机变量(取值可列)
设 X X X 是离散随机变量,取值集合为 X = { x 1 , x 2 , x 3 , ... } \mathcal{X} = \{x_1, x_2, x_3, \dots\} X={x1,x2,x3,...},
其概率质量函数(PMF) 为 p ( x ) = P ( X = x ) p(x) = \mathbb{P}(X = x) p(x)=P(X=x)。
则对任意函数 f ( X ) f(X) f(X),其期望定义为:
E f ( X ) = ∑ x ∈ X p ( x ) ⋅ f ( x ) \boxed{ \mathbb{E}f(X) = \sum_{x \in \mathcal{X}} p(x) \cdot f(x) } Ef(X)=x∈X∑p(x)⋅f(x)
- 求和遍历所有可能取值
- 每项是「结果大小 × 发生概率」
- 若 f ( X ) = X f(X) = X f(X)=X,则 E X \mathbb{E}X EX 就是均值(mean)
再看抽球例子(令 X X X = 颜色, R = f ( X ) R = f(X) R=f(X) = 奖金):
| x x x(颜色) | p ( x ) p(x) p(x) | f ( x ) f(x) f(x)(奖金) | p ( x ) ⋅ f ( x ) p(x) \cdot f(x) p(x)⋅f(x) |
|---|---|---|---|
| 红 | 0.2 | +10 | +2.0 |
| 绿 | 0.5 | +5 | +2.5 |
| 蓝 | 0.3 | -20 | -6.0 |
| 总和 | 1.0 | --- | -1.5 ✅ |
期望奖金 = -1.5 元。
2️⃣ 连续型随机变量(取值充满区间)
设 X X X 是连续随机变量,在区间 X ⊆ R \mathcal{X} \subseteq \mathbb{R} X⊆R 上取值,
其概率密度函数(PDF) 为 p ( x ) p(x) p(x),满足:
p ( x ) ≥ 0 , ∫ X p ( x ) d x = 1 p(x) \geq 0,\quad \int_{\mathcal{X}} p(x)\,dx = 1 p(x)≥0,∫Xp(x)dx=1
则对任意函数 f ( X ) f(X) f(X),其期望定义为:
E f ( X ) = ∫ X p ( x ) ⋅ f ( x ) d x \boxed{ \mathbb{E}f(X) = \int_{\mathcal{X}} p(x) \cdot f(x)\,dx } Ef(X)=∫Xp(x)⋅f(x)dx
- p ( x ) p(x) p(x) 本身不是概率! 它是"概率的密度";
- 真实概率需对区间积分: P ( a ≤ X ≤ b ) = ∫ a b p ( x ) d x \mathbb{P}(a \leq X \leq b) = \int_a^b p(x)\,dx P(a≤X≤b)=∫abp(x)dx
实例:机器人手臂角度偏差
假设控制器让机械臂指向 90°,但由于噪声,实际角度 X X X 服从高斯分布:
- 均值 μ = 90 ∘ \mu = 90^\circ μ=90∘,标准差 σ = 5 ∘ \sigma = 5^\circ σ=5∘
- PDF: p ( x ) = 1 2 π ⋅ 5 exp ( − ( x − 90 ) 2 2 ⋅ 5 2 ) p(x) = \dfrac{1}{\sqrt{2\pi}\cdot 5} \exp\left(-\dfrac{(x - 90)^2}{2 \cdot 5^2}\right) p(x)=2π ⋅51exp(−2⋅52(x−90)2)
我们关心角度偏差的平方 (控制误差): f ( X ) = ( X − 90 ) 2 f(X) = (X - 90)^2 f(X)=(X−90)2
则期望误差为:
E ( X − 90 ) 2 = ∫ − ∞ ∞ ( x − 90 ) 2 ⋅ p ( x ) d x = σ 2 = 25 \mathbb{E}(X - 90)\^2 = \int_{-\infty}^{\infty} (x - 90)^2 \cdot p(x)\, dx = \sigma^2 = 25 E(X−90)2=∫−∞∞(x−90)2⋅p(x)dx=σ2=25
这就是方差(Variance) !它本身就是一种期望: V a r ( X ) = E ( X − μ ) 2 \mathrm{Var}(X) = \mathbb{E}(X - \\mu)\^2 Var(X)=E(X−μ)2
三、强化学习的基本元素(非常重要,一切的基础,务必背下来)
我们用一个经典例子贯穿始终:
超级马里奥

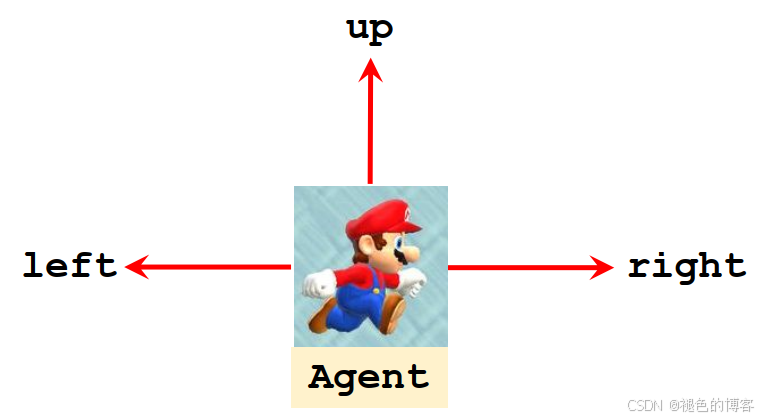
1️⃣ 智能体(Agent)
决策者,根据当前信息选择动作。
在这个例子中就是马里奥本人,它负责观察、决策、行动。
2️⃣ 环境(Environment)
动态系统,接收动作、给出新状态与奖励。
在这个例子中就是整个游戏世界:砖块、敌人、金币、关卡规则等,它接收马里奥的动作,更新世界,并给出反馈。
二者交互过程如下:
python
s₀ → Agent → a₀ → Environment → (r₀, s₁) → Agent → a₁ → ...3️⃣ 状态(State s s s)
描述环境在某一时刻的完整可观测信息(如游戏画面、机器人关节角度)。
在这个例子中就是马里奥当前看到的画面信息 (如位置、敌人距离、剩余时间)
注意:状态不一定是完整地图!现实中智能体往往只能看到局部(称为「部分可观测」)。
4️⃣ 动作(Action a a a)
智能体在状态 s s s 下可执行的操作集合。
例如:马里奥能做的操作:{左, 右, 跳}
记作动作空间 A = { left , right , jump } \mathcal{A} = \{\text{left}, \text{right}, \text{jump}\} A={left,right,jump}
5️⃣策略(Policy)
决策规则:映射状态到动作的分布。
定义为在状态 s s s 下,选择每个动作的概率是多少?
π ( a ∣ s ) = P ( A = a ∣ S = s ) \pi(a \mid s) = \mathbb{P}(A = a \mid S = s) π(a∣s)=P(A=a∣S=s)
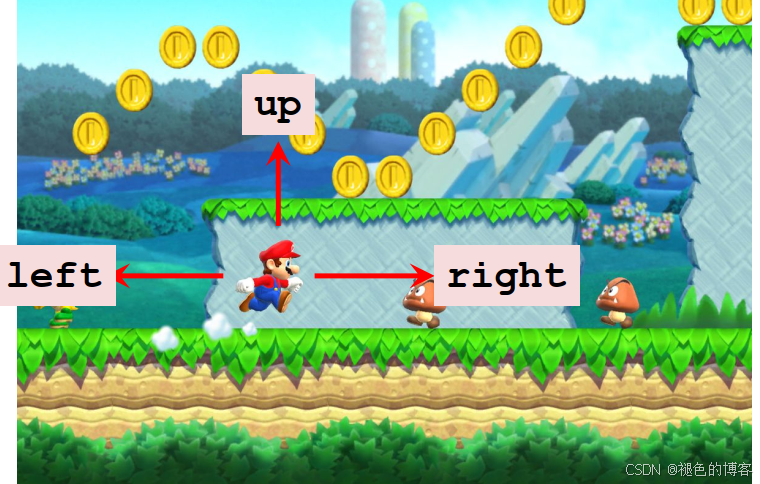
在这个例子中马里奥在状态 s s s下,可能的策略是:
| 动作 a a a | π ( a ∣ s ) \pi(a \mid s) π(a∣s) |
|---|---|
| 上(吃金币) | 0.7 |
| 左(后退,为吃金币做准备) | 0.2 |
| 右 (前进,会碰到敌人) | 0.1 |
注意这是一个随机策略(Stochastic Policy)。
为什么需要随机性?
- 避免卡死在局部最优(比如只顾眼前金币,不向前探索)
- 允许"探索"新动作------就像人偶尔会尝试新路线
6️⃣奖励(Reward r r r)
→ 环境给的即时反馈,数值越大学习效果越好
例如:
| 事件 | 奖励 r r r |
|---|---|
| 吃到金币 | + 1 +1 +1 |
| 踩死敌人 | + 10 +10 +10 |
| 赢得游戏 | + 1000 +1000 +1000 |
| 碰到敌人 | − 1000 -1000 −1000(游戏结束) |
| 啥也没干 | 0 0 0 |
奖励是 RL 的唯一监督信号! 智能体不知道"目标是什么",只认"分数高低"。
四、回报(Return)与折扣(Discounting)
智能体的目标不是最大化单步奖励,而是长期累积收益。单步奖励(如 +1)意义不大,关键是:整局游戏的总分!
定义从时间 t t t 开始的回报(Return) :
U t = R t + R t + 1 + R t + 2 + ⋯ + R T U_t = R_t + R_{t+1} + R_{t+2} + \cdots + R_T Ut=Rt+Rt+1+Rt+2+⋯+RT
其中 T T T 是游戏结束时刻(如马里奥通关 or 死亡)。
但有个问题:未来的奖励,和现在的奖励等价吗?
现在我给你两个选项
💰 选 A:现在拿 80 元
💰 选 B:1 年后拿 100 元
我相信大部分人选 A, 因为"现在的一块钱比未来的一块钱更值钱"
为了衡量现在奖励与未来奖励之间的这种折扣关系,于是引入折扣因子(Discount Factor) γ ∈ 0 , 1 \gamma \in 0, 1 γ∈0,1,定义折扣回报 :
U t = R t + γ R t + 1 + γ 2 R t + 2 + ⋯ + γ T − t R T U_t = R_t + \gamma R_{t+1} + \gamma^2 R_{t+2} + \cdots + \gamma^{T-t} R_T Ut=Rt+γRt+1+γ2Rt+2+⋯+γT−tRT
| γ \gamma γ 值 | 行为风格 | 适用场景 |
|---|---|---|
| 0.0 | 极度短视 | 马上要关机的机器人 |
| 0.9 | 平衡眼前与长远 | 大多数游戏、控制任务 |
| 0.99 | 非常有耐心 | 长期规划(如自动驾驶) |
实际中 γ = 0.9 ∼ 0.99 \gamma = 0.9 \sim 0.99 γ=0.9∼0.99 很常见------差 1 ∼ 10 % 1\sim10\% 1∼10% 的折扣,可能让智能体从"苟活"进化到"夺冠"!
五、环境如何响应?------状态转移(State Transition)
马里奥执行动作后,环境会给出新状态 和奖励 。
这个过程由状态转移函数描述:
p ( s ′ ∣ s , a ) = P ( S ′ = s ′ ∣ S = s , A = a ) p(s' \mid s, a) = \mathbb{P}(S' = s' \mid S = s, A = a) p(s′∣s,a)=P(S′=s′∣S=s,A=a)
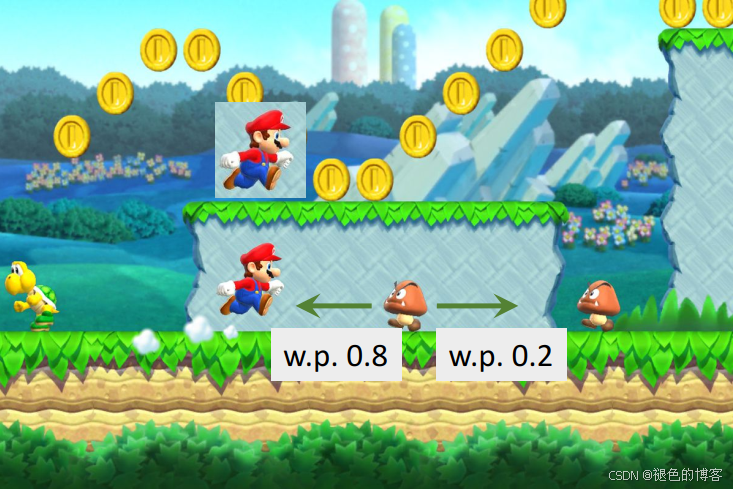
环境不确定性:
马里奥在选择向上跳之后,环境会随之更新,但是环境的更新存在不确定性,例如图中敌人的运动轨迹:
- 80% 向左移动 →( s 1 ′ s_1' s1′)
- 20% 向右移动 →( s 2 ′ s_2' s2′)
即:
p ( s 1 ′ ∣ s , 右 ) = 0.8 , p ( s 2 ′ ∣ s , 右 ) = 0.2 p(s_1' \mid s, \text{右}) = 0.8,\quad p(s_2' \mid s, \text{右}) = 0.2 p(s1′∣s,右)=0.8,p(s2′∣s,右)=0.2
注意:这种随机性来自环境,不是智能体控制的。
两个随机性来源(极易混淆!务必厘清)
强化学习中的不确定性来自两方面:
| 来源 | 谁控制? | 数学表示 | 类比 |
|---|---|---|---|
| 动作随机性 | 智能体(策略 π \pi π) | A ∼ π ( ⋅ ∣ s ) A \sim \pi(\cdot \mid s) A∼π(⋅∣s) | 你决定"80% 概率加油门" |
| 状态转移随机性 | 环境(随机性 p p p) | S ′ ∼ p ( ⋅ ∣ s , a ) S' \sim p(\cdot \mid s, a) S′∼p(⋅∣s,a) | 路面结冰导致车打滑 |
这两种随机性的叠加,导致后续所有奖励都变成随机变量!
六、如何评估一个决策的好坏?------价值函数登场!
上面分析了由于强化学习中的两个随机性 动作随机性 和状态转移随机性 ,导致回报 U t U_t Ut 是随机的:
- U t = R t + γ R t + 1 + γ 2 R t + 2 + ⋯ + γ T − t R T U_t = R_t + \gamma R_{t+1} + \gamma^2 R_{t+2} + \cdots + \gamma^{T-t} R_T Ut=Rt+γRt+1+γ2Rt+2+⋯+γT−tRT
- 而 R k R_k Rk 依赖于 ( S k , A k ) (S_k, A_k) (Sk,Ak)
- S k + 1 ∼ p ( ⋅ ∣ S k , A k ) S_{k+1} \sim p(\cdot \mid S_k, A_k) Sk+1∼p(⋅∣Sk,Ak) → 环境随机
- A k ∼ π ( ⋅ ∣ S k ) A_k \sim \pi(\cdot \mid S_k) Ak∼π(⋅∣Sk) → 策略随机
所以:即使固定了当前状态 S t = s S_t = s St=s 和动作 A t = a A_t = a At=a ,后续的
( S t + 1 , A t + 1 , R t + 1 , S t + 2 , A t + 2 , R t + 2 , ... ) (S_{t+1}, A_{t+1}, R_{t+1},\; S_{t+2}, A_{t+2}, R_{t+2},\; \dots) (St+1,At+1,Rt+1,St+2,At+2,Rt+2,...)
仍然充满随机性!
这就导致:同一个 ( s , a ) (s, a) (s,a),重复玩 10 次,可能得到 10 个不同的 u t u_t ut(实现值) 。
但如果我们关心「跳这个动作到底靠不靠谱 」,就不能看某一次运气,而要看长期平均表现,这时期望就派上了用场。
动作价值函数 Q π ( s , a ) Q^\pi(s, a) Qπ(s,a)
"在状态 s s s 下,先选动作 a a a ,之后都按策略 π \pi π 走------预期总分是多少? "
用于衡量在当前状态 s s s ,动作 a a a的好坏。
Q π ( s , a ) = E U t ∣ S t = s , A t = a Q^\pi(s, a) = \mathbb{E}\big\\, U_t \\,\\big\|\\, S_t = s,\\, A_t = a \\,\\big Qπ(s,a)=EUt St=s,At=a
我们通过对回报 U t U_{t} Ut 求期望,从而消除未来路径的随机性,保留一个"只依赖策略 π \pi π 和环境模型 p p p"的确定数值。
具体消除哪些随机变量?
| 变量 | 是否被条件化(固定)? | 是否仍随机? | 是否被期望"平均掉"? |
|---|---|---|---|
| S t S_t St | ✅ 固定为 s s s | 否 | --- |
| A t A_t At | ✅ 固定为 a a a | 否 | --- |
| S t + 1 , A t + 1 , R t + 1 S_{t+1}, A_{t+1}, R_{t+1} St+1,At+1,Rt+1 | ❌ | ✅ | ✔️ 被 E ⋅ \mathbb{E}\\cdot E⋅ 平均 |
| S t + 2 , A t + 2 , R t + 2 S_{t+2}, A_{t+2}, R_{t+2} St+2,At+2,Rt+2 | ❌ | ✅ | ✔️ |
| ⋮ \vdots ⋮ |
换句话说:
- 我们人为设定:"此时此刻,马里奥就在金币前( S t = s S_t = s St=s),并且它决定跳( A t = a A_t = a At=a)"
- 但从 t + 1 t+1 t+1 步开始,一切按规则随机演化(环境按 p p p 转移,马里奥按 π \pi π 选动作)
- Q π ( s , a ) Q^\pi(s, a) Qπ(s,a) 就是在上述前提下,所有可能未来轨迹的回报加权平均
它衡量的是:动作 a a a 在状态 s s s 下的"长期平均潜力",与单次运气无关。
状态价值函数 V π ( s ) V^\pi(s) Vπ(s)
对动作价值函数 Q π ( s , a ) Q^\pi(s, a) Qπ(s,a)求动作 A t A_t At 的期望,进一步消除"当前动作 A t A_t At 的随机性",得到仅关于状态 s s s 和策略 π \pi π 的价值。
用于衡量当前状态对于结果的好坏。
V π ( s ) = E A ∼ π ( ⋅ ∣ s ) Q π ( s , A ) = ∑ a π ( a ∣ s ) ⋅ Q π ( s , a ) V^\pi(s) = \mathbb{E}{A \sim \pi(\cdot \mid s)} \big\\, Q\^\\pi(s, A) \\,\\big = \sum{a} \pi(a \mid s) \cdot Q^\pi(s, a) Vπ(s)=EA∼π(⋅∣s)Qπ(s,A)=a∑π(a∣s)⋅Qπ(s,a)
消除哪些变量?
| 变量 | 是否被平均掉? |
|---|---|
| 未来轨迹 ( S t + 1 , A t + 1 , ... ) (S_{t+1}, A_{t+1}, \dots) (St+1,At+1,...) | 已由 Q π Q^\pi Qπ 的期望消掉 |
| 当前动作 A t A_t At | 由 V π V^\pi Vπ 的期望 再次消掉 |
最终 V π ( s ) V^\pi(s) Vπ(s) 的含义是:
"马里奥当前在状态 s s s,之后完全交给策略 π \pi π 自动决策------长期平均能得多少分?"
它不再关心"这一步具体选什么",只评估"按这套策略走,这个局面整体是好是坏"。
两层期望,两层抽象
| 函数 | 表达式 | 消除的随机性 | 用途 |
|---|---|---|---|
| 回报 U t U_t Ut | R t + γ R t + 1 + ⋯ R_t + \gamma R_{t+1} + \cdots Rt+γRt+1+⋯ | 无 | 单次实验的得分(随机、不可靠) |
| Q π ( s , a ) Q^\pi(s, a) Qπ(s,a) | E U t ∣ S t = s , A t = a \mathbb{E}U_t \\mid S_t=s, A_t=a EUt∣St=s,At=a | 未来路径 ( S t + 1 , A t + 1 , ... ) (S_{t+1}, A_{t+1}, \dots) (St+1,At+1,...) | 评估某个具体动作的长期价值(微观决策) |
| V π ( s ) V^\pi(s) Vπ(s) | E A ∼ π Q π ( s , A ) \mathbb{E}_{A \sim \pi}Q\^\\pi(s, A) EA∼πQπ(s,A) | 当前动作 A t A_t At + 未来路径 | 评估某个状态 + 策略组合的整体好坏(宏观局势) |
类比:炒股决策
| 场景 | U t U_t Ut | Q π ( s , a ) Q^\pi(s, a) Qπ(s,a) | V π ( s ) V^\pi(s) Vπ(s) |
|---|---|---|---|
| 你看到某支股票跌到 10 元(状态 s s s) | 买 100 股后,3 个月亏了 5000(单次结果) | "如果此刻买入",历史回测平均年化收益 +8% | "按我的交易系统(策略 π \pi π)",当股价=10 元时,平均胜率 62%、期望盈亏比 1.5 |
专业投资者不看单次盈亏( U t U_t Ut),而是依赖回测期望( Q π Q^\pi Qπ)与系统评估( V π V^\pi Vπ)做决策。
七、实战第一步:用 OpenAI Gym 动手试试!
OpenAI Gym 是 RL 的"标准实验台",提供大量预设环境。
🎯 推荐入门任务:CartPole(推杆平衡)
- 目标:移动小车,让杆子不倒
- 动作:2 种 ------ 小车左移 / 右移
- 状态:4 维向量(位置、速度、角度、角速度)
- 奖励:每坚持 1 步,+1 分(满分 500)
一段超简代码体验交互:
python
import gym
env = gym.make("CartPole-v1")
state = env.reset() # 初始状态
total_reward = 0
for t in range(500):
action = env.action_space.sample() # 随机选动作(瞎玩)
next_state, reward, done, _ = env.step(action) # 执行
total_reward += reward
env.render() # 弹窗看动画(可选)
if done:
break
print(f"坚持了 {t+1} 步,总得分:{total_reward}")运行几次你会发现:随机策略只能撑 10~30 步 。
而人类/RL 算法可达 500 步 ------ 这就是"学习"的力量!