机器人领域的一些Key insights
操作应回归物理本质
- 提出人:Matthew T. Mason,卡耐基梅隆大学的机器人学教授
- blog:https://mtmason.com/the-heart-of-robotic-manipulation/
- 观点:
- 操作的关键在于理解并利用物理世界的基本规律
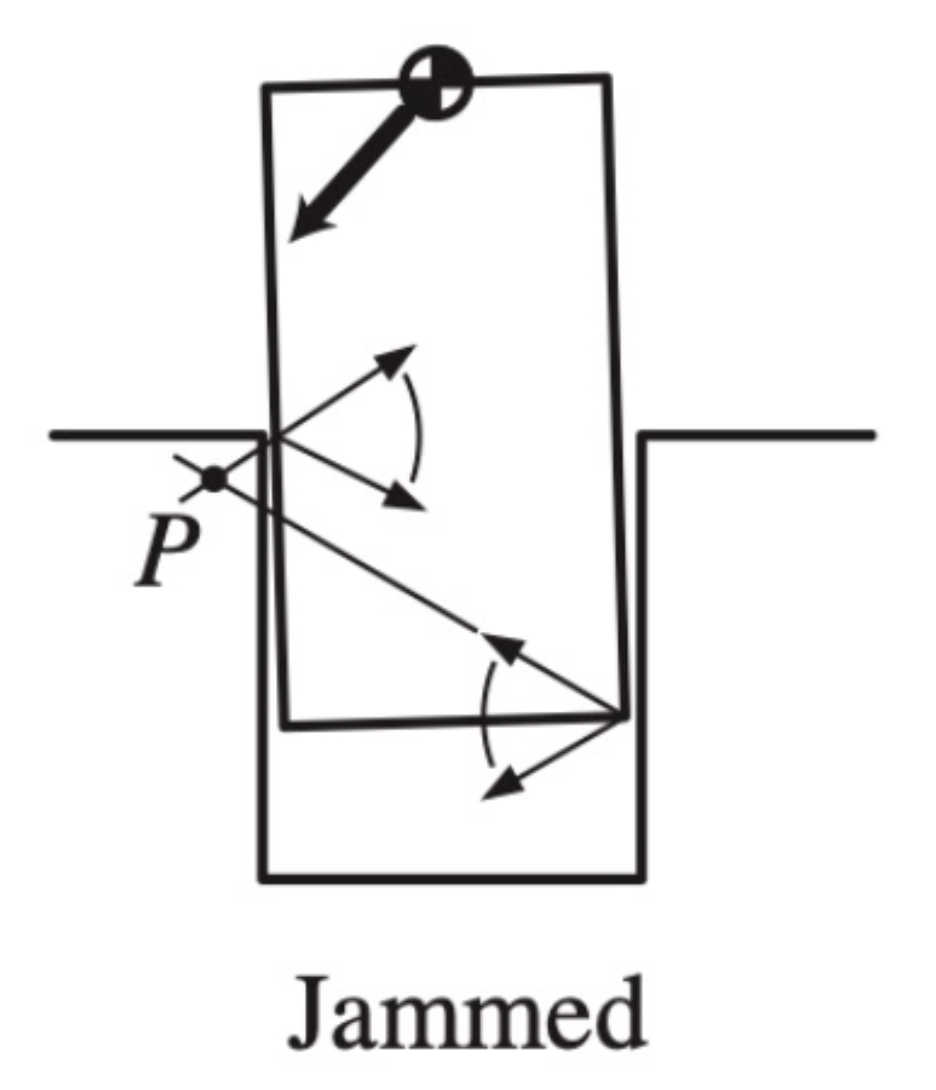
- 举例:摩擦锥 friction cone(给定法向压力的情况下,最大能产生的侧向摩擦力所构成的锥体)
- 应用:机器人抓取时需要考虑摩擦锥,来保证操作的稳定
- 抽屉想要推进柜子,如果接触的方向不对,推力会被摩擦锥的反力所抵消,从而被卡住(如下左图)
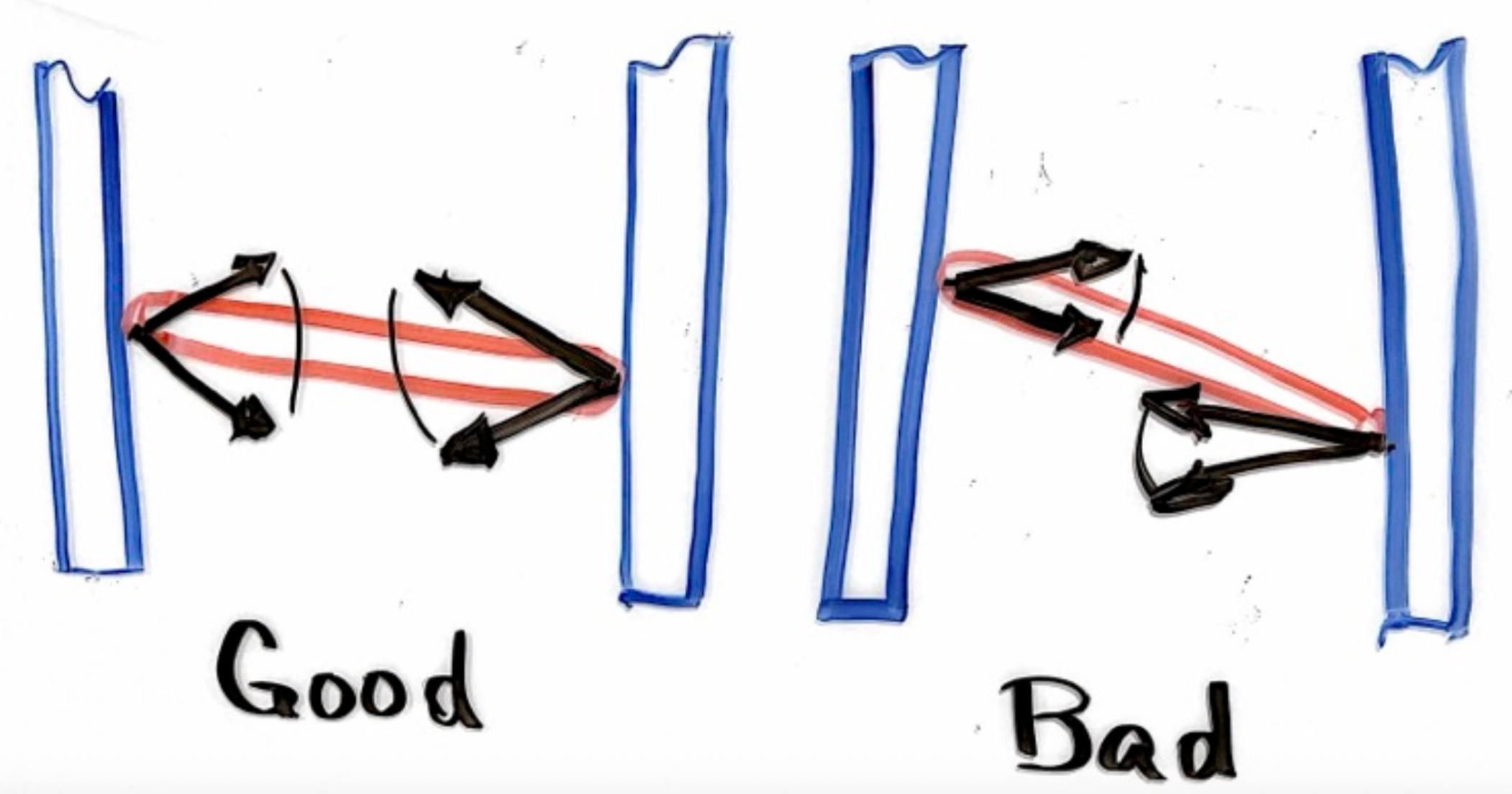
- 抓硬币如果夹角太大,摩擦锥的力无法互相抵消,就抓不住(如下右图)
- 嵌套的玻璃杯要用很大的力抽出来,这个力可能也会捏碎玻璃杯
- 应用:机器人抓取时需要考虑摩擦锥,来保证操作的稳定
- 评价:Mason暗示当前机器人学过于关注深度学习和数据驱动方法,而忽视了对基本物理交互原理的理解和利用。