基于 YOLOv8 的交通标识与设施识别系统(含完整源码)
一、研究背景:为什么要做交通标识智能识别?
在智慧城市与智能交通体系不断发展的背景下,道路交通场景对感知能力提出了越来越高的要求。 无论是:
- 🚗 自动驾驶辅助系统
- 📷 道路监控与违章识别
- 🚦 智能信号控制
- 🏙 城市道路数字化管理
都离不开对 交通标识与基础设施的精准识别。
传统基于图像处理和规则的方法,在面对以下复杂情况时往往表现不佳:
- 光照变化(逆光、夜间、雨雾)
- 视角变化(倾斜、远近)
- 遮挡、老化、标志褪色
- 场景复杂(城市道路、高速、公路)
因此,引入基于深度学习的目标检测技术 ,成为智能交通感知系统的核心方向之一。 
源码下载与效果演示
哔哩哔哩视频下方观看: www.bilibili.com/video/BV1U1...
包含:
📦完整项目源码
📦 预训练模型权重
🗂️ 数据集地址(含标注脚本

二、系统总体设计思路
2.1 项目目标
本项目基于 YOLOv8 目标检测模型 ,构建一套完整的 交通标识与设施智能识别系统,实现以下目标:
- 自动识别关键交通元素
- 支持多种输入方式(图像 / 视频 / 摄像头)
- 提供可视化桌面端操作界面
- 实现从模型训练到工程部署的完整闭环
2.2 检测目标定义
系统当前支持以下 4 类交通目标(可扩展):
| 类别 | 含义 |
|---|---|
| crosswalk | 人行横道 |
| speedlimit | 限速标志 |
| stop | 停车标志 |
| trafficlight | 交通信号灯 |
这些目标具有 高频出现、对安全影响大、视觉特征明显 的特点,是智能交通感知系统的核心元素。



2.3 技术架构概览
系统整体采用经典的 AI 工程化分层设计:
markdown
输入层(图片 / 视频 / 摄像头)
↓
YOLOv8 目标检测模型
↓
目标类别 + 位置 + 置信度
↓
PyQt5 图形界面渲染
↓
结果展示 / 保存 / 扩展分析三、YOLOv8 在交通场景中的优势分析
3.1 为什么选择 YOLOv8?
YOLOv8 是 Ultralytics 推出的新一代目标检测模型,相比 YOLOv5 / YOLOv7,在交通场景中具有明显优势:
- ✅ Anchor-Free 架构 减少先验框依赖,对不同尺度标志更友好
- ✅ 更高的推理速度 满足实时交通监控需求
- ✅ 更稳定的训练过程 收敛速度快,调参成本低
- ✅ 部署友好 原生支持 ONNX、TensorRT 等导出格式
3.2 交通场景下的挑战
交通标识检测并非简单任务,主要难点包括:
- 标志尺寸差异大(远处限速牌 vs 近距离信号灯)
- 背景复杂(建筑、车辆、广告牌)
- 目标存在遮挡或部分损坏
- 白天 / 夜晚 / 雨雪等多环境变化
YOLOv8 的多尺度特征融合与 TaskAlignedAssigner,使其在此类复杂场景中具备较强鲁棒性。
四、数据集构建与标注规范
4.1 数据集来源与特点
项目使用的交通场景数据集覆盖:
- 城市道路
- 高速公路
- 不同天气与光照条件
- 多角度拍摄视角
目标分布合理,有助于模型学习真实道路特征。
4.2 YOLO 数据集结构
采用标准 YOLO 格式,保证训练与推理流程一致:
kotlin
dataset/
├── images/
│ ├── train/
│ └── val/
├── labels/
│ ├── train/
│ └── val/标注文件示例:
2 0.4312 0.5128 0.1845 0.2967含义说明:
2:类别 ID(如 stop)- 后四项为归一化后的边界框坐标
4.3 类别配置示例
yaml
nc: 4
names:
- crosswalk
- speedlimit
- stop
- trafficlight五、模型训练与性能评估
5.1 模型训练命令
bash
yolo detect train \
data=traffic.yaml \
model=yolov8n.pt \
epochs=100 \
batch=16 \
imgsz=640 \
lr0=0.001参数选择说明:
imgsz=640:兼顾精度与速度batch=16:适合主流显卡配置epochs=100:保证模型充分收敛
5.2 训练结果分析
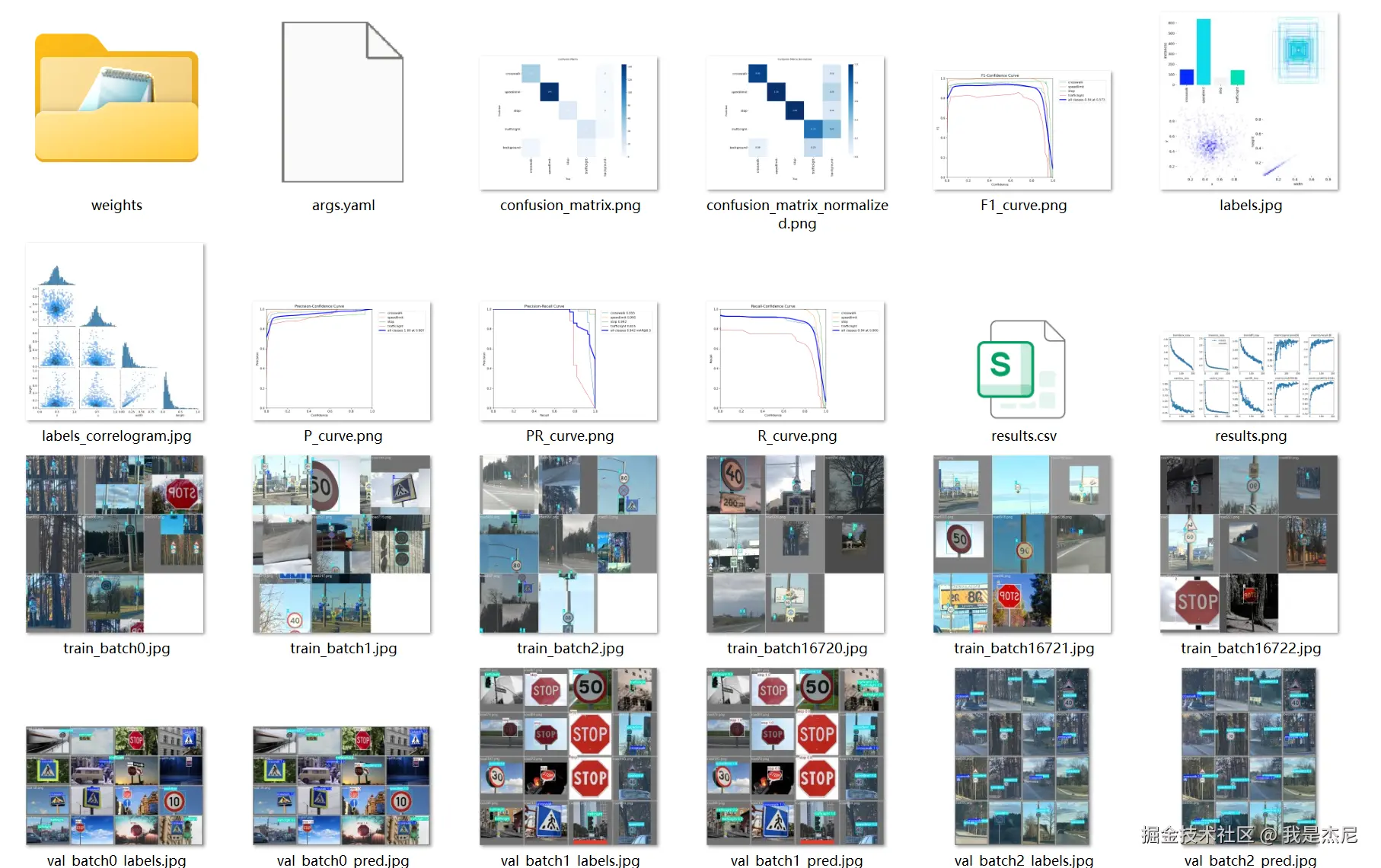
训练完成后,系统会自动生成:
- 📈 Loss 曲线(box / cls / dfl)
- 📊 mAP@0.5、mAP@0.5:0.95
- 🔍 混淆矩阵(confusion matrix)
一般来说:
当 mAP@0.5 ≥ 90%,模型已具备实际工程应用价值。
六、模型推理与结果解析
6.1 推理代码示例
python
from ultralytics import YOLO
model = YOLO("best.pt")
results = model("road.jpg", conf=0.25, save=True)
for r in results:
for box in r.boxes:
print(box.cls, box.conf)模型输出包括:
- 目标类别
- 置信度
- 边界框坐标
6.2 推理效果说明
系统可在以下场景下稳定工作:
- 单张交通图片检测
- 批量道路图片分析
- 视频流逐帧检测
- 实时摄像头监控
检测结果以 边框 + 类别标签 + 置信度 形式可视化呈现。
七、PyQt5 桌面应用设计
7.1 为什么使用 PyQt5?
相比 Web 前端,PyQt5 在本项目中的优势在于:
- 本地部署,适合离线环境
- 开发效率高,界面响应快
- 易于与 Python 推理代码集成
- 适合科研、演示与工程原型
7.2 功能模块划分
桌面端主要包含:
- 📷 图片检测模块
- 📁 文件夹批量检测
- 🎥 视频检测模块
- 📡 摄像头实时检测
- ⚙️ 置信度阈值调节
- 💾 结果保存控制
用户无需编写任何代码即可使用模型能力。
八、工程应用与扩展方向
8.1 实际应用场景
- 智能交通监控系统
- 自动驾驶辅助感知模块
- 道路巡检与设施普查
- AI 视觉教学与实验平台
8.2 后续可拓展方向
-
增加更多交通类别
- 禁行、转向、警告标志
-
引入目标跟踪算法
- 交通灯状态时序分析
-
边缘端部署
- Jetson、嵌入式设备
-
与地图系统联动
- 构建高精度道路感知模型


九、总结
本文围绕 YOLOv8 + PyQt5 技术体系,完整介绍了一套 交通标识与设施智能识别系统的工程化实现方案。项目不仅实现了多类交通目标的精准检测,还通过图形化界面大幅降低了使用门槛,使模型能力真正"可用、可落地"。
核心优势回顾:
- 🚀 实时、高精度目标检测
- 🧠 深度学习与工程实践结合
- 🖥 图形界面友好,开箱即用
- 📦 提供完整源码与训练流程
该系统既可作为 智能交通领域的研究原型 ,也可作为 计算机视觉工程项目或毕业设计的高质量模板,具备良好的扩展潜力与实际应用价值。