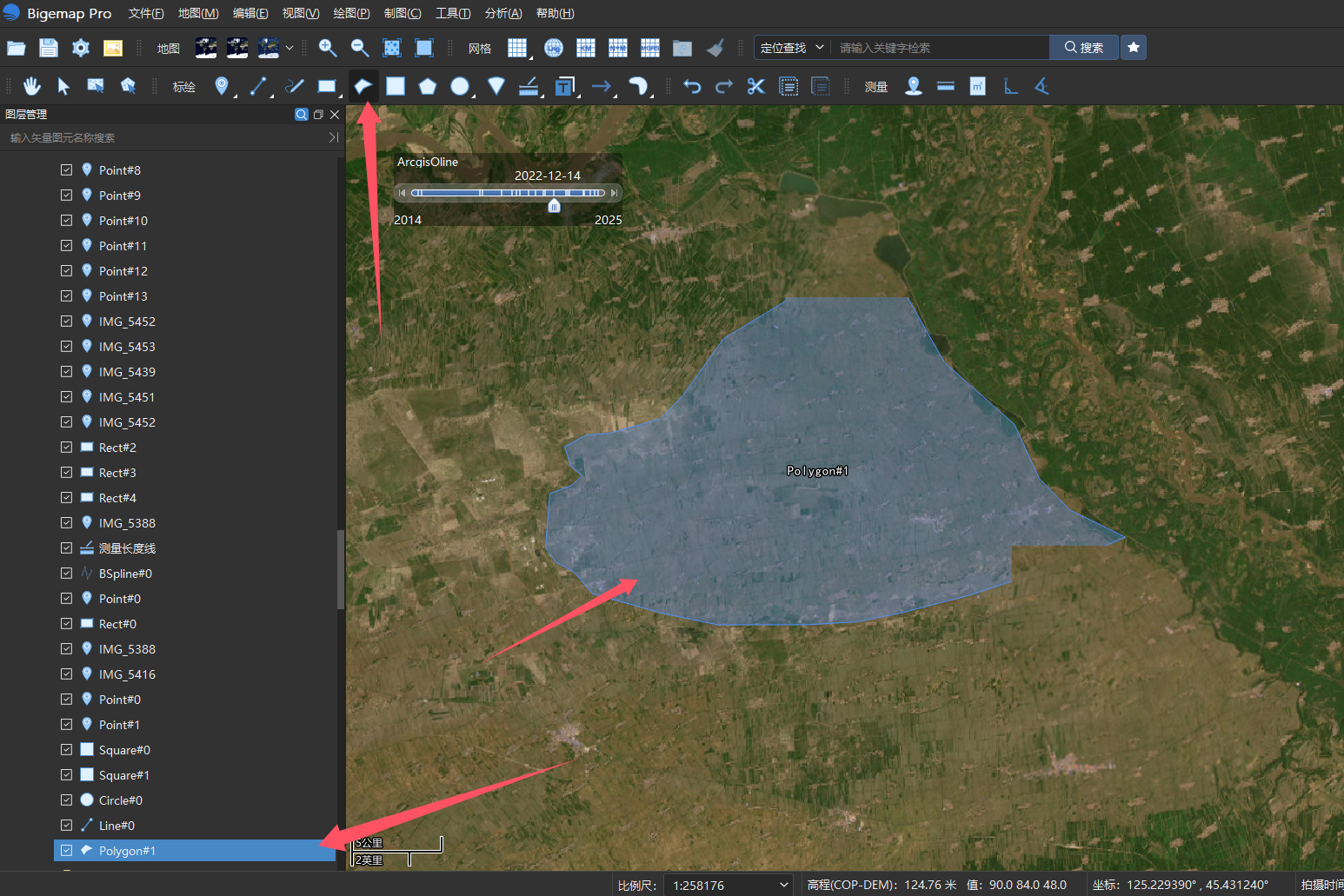
借助Bigemap Pror软件规划好范围,然后导出kml文件,就可以导入大疆T系列无人机了,具体步骤如下
第一步, 规划好范围
第二步,到处kml
选择T系列KML
点击确定 保存
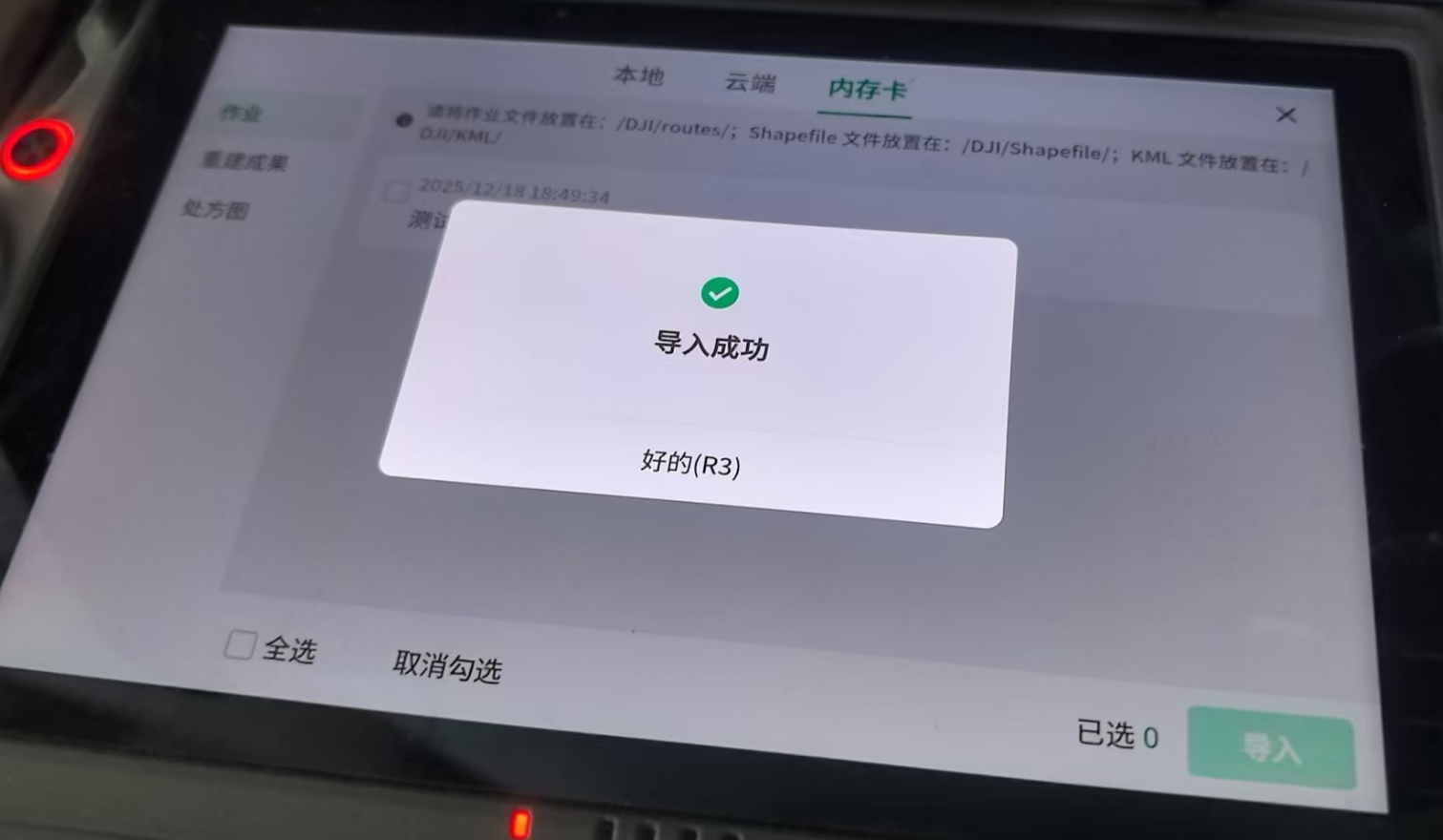
第三步,导入卡中,打开kml,查看作业范围