Zonal 架构的引入,虽然物理上归拢了控制器,但如果不解决**"智能碎片化"**的问题,软件定义汽车 (SDV) 依然是一句空话。
MCU-less (去 MCU 化) 是近年来汽车电子领域最激进、最硬核的变革。它主张:与其让每个零件都有一点点小聪明,不如让它们全变成听话的傻瓜,只保留一个超级大脑。
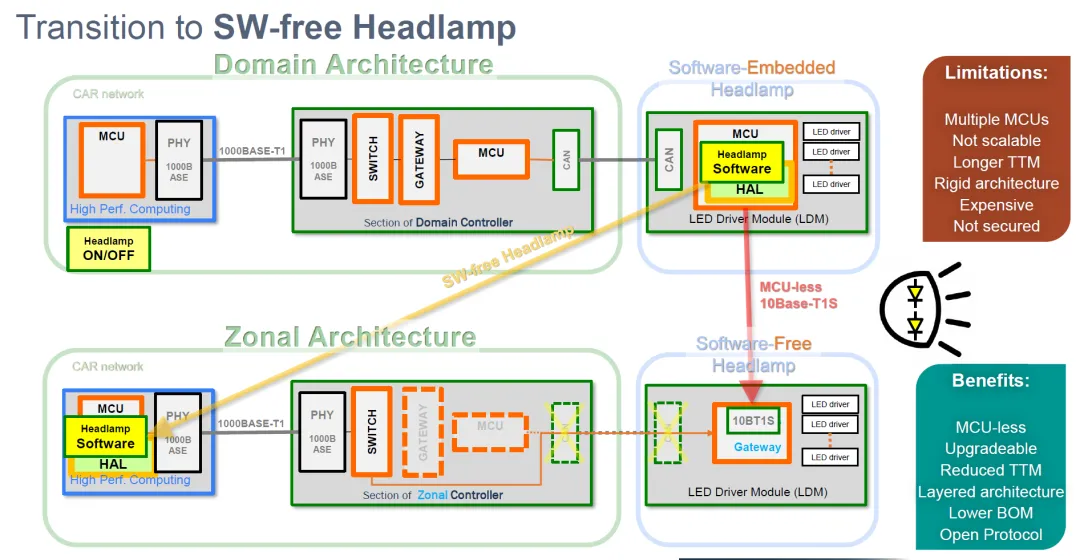
1 MCU-less 革命:边缘节点的"去智能"化
在传统架构中,我们买一个智能大灯,里面通常藏着一颗 MCU,跑着供应商写死的几万行代码;买一个雨刮电机,里面也有一颗 MCU。
痛点:当我们想升级大灯的控制逻辑(比如实现"随动转向+行人避让"),我们无法绕过供应商的 MCU 代码。这颗小小的 MCU 成了扼杀创新的瓶颈。
MCU-less 革命 的核心思想是:把边缘节点的"脑子"挖掉,只保留"神经"和"肌肉"。
1. 重新定义传感器与执行器:从 Smart 到 Dumb
(1) 传统模式 (Smart Component)
- 形态:传感器 + MCU + CAN 收发器。
- 工作流 :
- 雨量传感器检测到光线变化 -> 内部 MCU 计算 -> 输出"雨量等级:中" (CAN 信号)。
- 缺点:算法被固化在传感器内部。如果我想用摄像头数据融合来优化雨量判断,做不到,因为传感器只给我最终结果。
(2) MCU-less 模式 (Dumb Component)
- 形态:传感器/驱动器 + PHY 芯片 (或串行器)。
- 工作流 :
- 雨量传感器检测到光线变化 -> 直接输出电压/数字原始值 (Raw Data) -> 通过高速总线传给 ZCU 或中央大脑 -> 中央大脑运行 AI 算法判断雨量。
- 变化 :
- 硬件:BOM 成本降低(省掉了 MCU 和 CAN 收发器)。
- 软件:控制逻辑完全上收。供应商只提供硬件,车企自己写算法。
2. 透传机制 (Pass-through) 的技术底座
要实现 MCU-less,关键在于如何低成本、低延迟地把原始数据传回来。传统的 CAN 总线带宽太低,无法传输 Raw Data。
(1) 10BASE-T1S:边缘以太网的救星
这是 IEEE 802.3cg 标准定义的短距离、低成本、多点连接以太网技术。它是 MCU-less 的完美搭档。
- 总线型拓扑 (Multidrop) :
- 不需要交换机!一根双绞线上可以挂载至少 8 个传感器/执行器(类似 CAN 的物理连接)。
- 这解决了以太网"点对点连接导致端口不够用"的问题。
- 带宽:10 Mbps。对于超声波雷达、雨量感应、氛围灯控制绰绰有余。
- 无冲突 :采用 PLCA (物理层冲突避免) 机制,保证了传输的确定性,不会像传统以太网那样发生碰撞。
(2) 智能模拟传感器链路 (如 TI FPD-Link / Maxim GMSL 低速版)
对于不需要 10M 带宽的极低速设备(如温度传感器),可以直接通过 ADC 采集 或 I2C 隧道 技术,经由 ZCU 透传。
3. MCU-less 的深远意义:SDV 的物理基础
为什么说没有 MCU-less 就没有真正的 SDV?
场景推演:雨刮器的 OTA
- 有 MCU 的雨刮 :
- 用户反馈:"小雨时雨刮刮得太快,很吵。"
- 车企:无能为力。因为控制刮刷频率的代码写在博世/法雷奥提供的雨刮电机 MCU 里。想改?得付 50 万开发费,等 6 个月。
- MCU-less 的雨刮 :
- 雨刮电机只是一个受 PWM 控制的马达。
- 控制代码(根据雨量算 PWM 占空比)运行在中央大脑的 Linux 上。
- 车企工程师:在中央大脑修改几行 Python/C++ 代码,调整 PID 参数,一夜之间通过 OTA 推送给全车队。
供应链重构
- Tier 1 的恐慌:供应商失去了软件溢价权,沦为纯硬件代工(卖铁的)。
- 车企的狂欢:掌握了核心算法,能够以软件版本迭代的速度快速响应用户需求。
结论 :
MCU-less 是**"硬件标准品化"的必经之路。它让汽车硬件像鼠标键盘一样标准化,而将差异化竞争完全转移到了中央计算平台的软件算法**上。这才是软件定义汽车的终极奥义。
很多人认为 SDV 就是"在中控屏上装 APP",这是极大的误解。真正的 SDV 是**"通过软件代码,改变物理世界的运行规律"**。
以下是 第1章:E/E 架构的演进路线图 中的 1.3 节(MCU-less 与 SDV 关系的深度剖析) 详细内容。
2 MCU-less 革命:SDV 的物理基石
核心论断:智能的本质是控制权的集中。如果边缘节点太"聪明",中央大脑就无法"独裁"。
在传统的汽车开发中,车企往往被困在供应商的"黑盒"里。MCU-less 的本质,是一场夺权运动------车企从 Tier 1 手中收回了对每一个电机、每一颗灯珠的绝对控制权。
1. 只有硬件变"傻",软件才能"定义"
(1) "黑盒"之痛:雨刮器的 OTA 悖论
让我们复盘一个真实的工程痛点:
- 用户需求:希望雨刮器在红灯停车时,自动降低刮刷频率以减少噪音(哪怕雨很大)。
- 传统架构(含 MCU) :
- 雨刮电机内部的 MCU 运行着供应商固化的 PID 控制算法。它只接收"开启/关闭/快/慢"几个简单的 CAN 指令。
- 中央大脑无法告诉雨刮电机:"现在车速是 0,请你刮慢点。" 因为供应商的协议里没定义这个指令。
- 结果:OTA 失败。你无法通过软件改变硬件的物理特性。
- MCU-less 架构 :
- 雨刮电机内部没有 MCU,直接由 ZCU 发出的 PWM 波驱动。
- 中央大脑拥有上帝视角:它同时知道"当前车速=0"和"当前雨量=大"。
- 软件定义 :中央大脑的代码逻辑:
if (Speed == 0) Target_PWM = Low; - 结果:OTA 成功。车企只需更新中央大脑的一个 App,就能让全车的雨刮器瞬间"变聪明"。
(2) 软硬解耦的终极形态
- 硬件标准化 (Commoditization) :
- 当边缘节点变成"哑终端"后,它们就成了标准品。车企可以随意替换供应商(A厂的电机换成B厂的),只要接口(PHY/驱动)一致,上层软件完全不用改。
- 软件原子化 (Atomization) :
- 控制逻辑被剥离成一个个原子服务(Atomic Service)。
- 例如:
Window.MoveTo(Position, Speed)。以前这个函数跑在车窗 MCU 里,现在跑在中央大脑里。这意味着上层应用可以以毫秒级的精度控制车窗轨迹(比如实现"车窗跟随音乐节奏舞动"这种离谱但可行的功能)。
2. 10BASE-T1S:支撑 Raw Data 透传的血管
要让中央大脑直接控制电机,就需要把电机内部的电流、位置等原始数据 (Raw Data) 实时传回来,并把 PWM/电压指令实时传下去。
传统的 CAN 总线做不到这一点(带宽低、时延抖动大)。10BASE-T1S 是这场革命的幕后英雄。
(1) 为什么是 10BASE-T1S?
- 多点连接 (Multidrop) :
- 它支持在一根双绞线上挂载至少 8 个节点(总线型拓扑)。
- 这完美复刻了 CAN 的布线优势,不需要昂贵的以太网交换机端口。
- 无冲突机制 (PLCA) :
- 物理层冲突避免 (Physical Layer Collision Avoidance)。
- 每个节点都有固定的发言机会(ID),就像在开会轮流发言。这保证了数据传输的确定性 (Determinism),对于电机闭环控制至关重要。
- 低成本 :
- 不需要复杂的 MAC/PHY 协议栈,硬件极其简单便宜。
(2) Raw Data 的价值
- 虚拟传感器 :
- 通过回传车窗电机的电流纹波 (Current Ripple) 原始数据,中央大脑可以用 AI 算法分析出车窗玻璃的老化程度 或密封条摩擦力,从而实现预测性维护。
- 如果用传统 MCU,这些宝贵的原始数据在本地就被处理成简单的"故障/正常"信号了,AI 根本没机会介入。
3. SDV 的未来:从 Feature-based 到 API-based
MCU-less 彻底打通了 SDV 的最后一公里。
- 旧时代:买车就是买 Feature(功能)。这车有定速巡航,那车没有。
- 新时代:买车就是买 API(能力)。这车提供了"控制速度"、"读取雷达"的 API,至于能组合出什么功能(ACC、LCC、NOA),完全取决于你装什么软件,或者你自己写什么脚本。
结论 :
MCU-less 不是为了省那几块钱的芯片成本(虽然确实省了),而是为了收回控制权。它让汽车的每一个末梢神经都直接受控于中央大脑,从而为 AI 大模型接管车辆控制铺平了物理道路。