一、创建一个房间
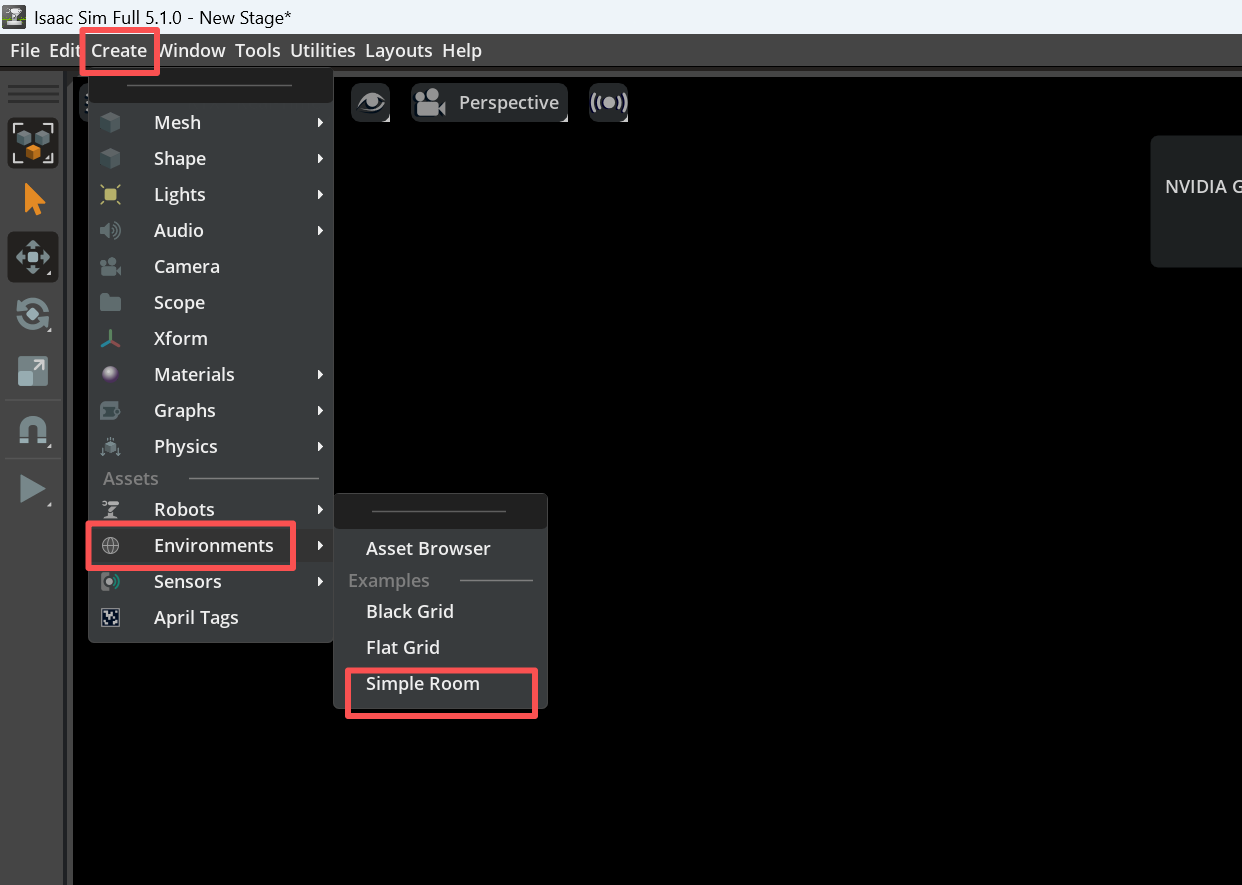
按这个来操作,(创建--》环境--》简单房间)
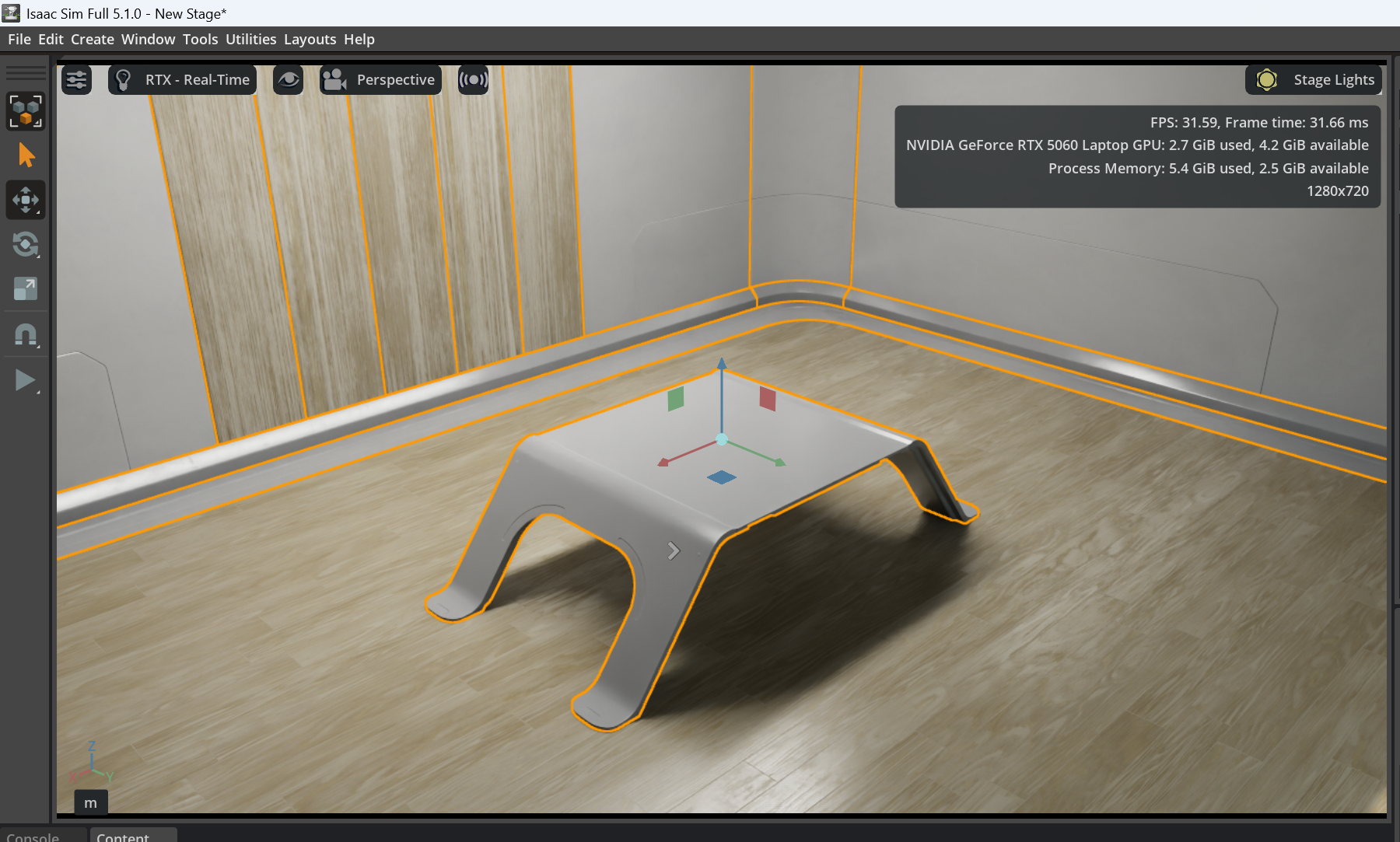
至此,咱已是元宇宙里有房的人了。
二、创建机械臂
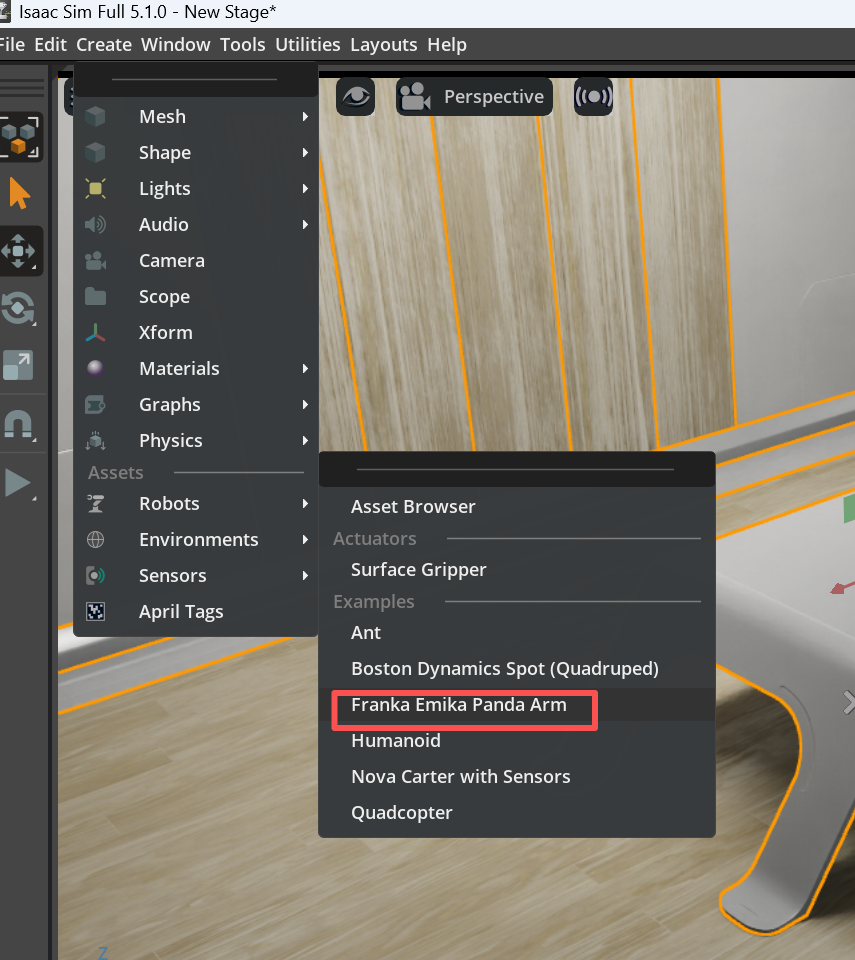
再整个机械臂
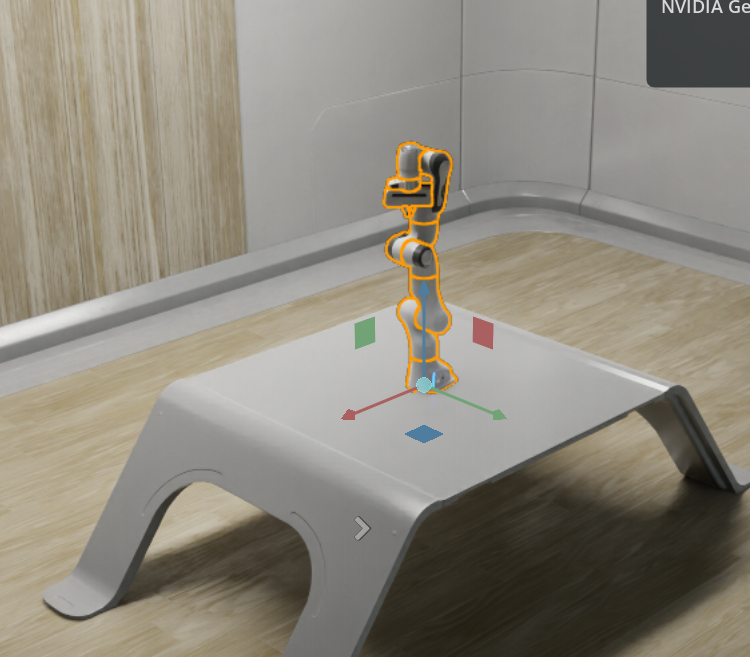
最开始我一直纠结这个机械臂是不是往桌子里穿模了,或者飘到天上了。后来我发现,这个初始位置,就是刚好放在桌面上的。所以机械臂和桌子,就暂时不用动了。
三、创建小方块
小方块假装是一个可以被机械臂抓的物品。

我这里的设置大概是这样的:
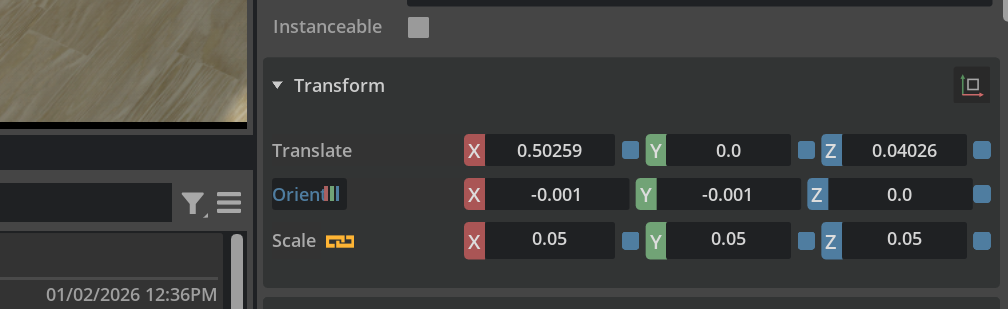
可以参考,但不必一模一样。
后面看看怎么让机械臂把方块拿起来,哈哈。
按这个来操作,(创建--》环境--》简单房间)
至此,咱已是元宇宙里有房的人了。
再整个机械臂
最开始我一直纠结这个机械臂是不是往桌子里穿模了,或者飘到天上了。后来我发现,这个初始位置,就是刚好放在桌面上的。所以机械臂和桌子,就暂时不用动了。
小方块假装是一个可以被机械臂抓的物品。
我这里的设置大概是这样的:
可以参考,但不必一模一样。
后面看看怎么让机械臂把方块拿起来,哈哈。