1. 概念界定
在工业场景中,AMR 系统并不运行在一个"单一、实时一致、全知全能"的世界模型之上。工厂现场的可观测性天然不完备、约束来源多元、决策时标分层,并且存在多主体(车辆、调度器、边缘交通控制、站点设备、业务系统与人)并发行动。由此,AMR 的"世界模型"必须被理解为一种分布式的多世界世界模型:
-
分布式(Distributed):世界状态与约束被拆分到不同节点,各节点依据自身可观测性、实时性与职责维护其"可行动的局部世界";
-
多世界(Multi-World) :不同节点维护的世界并非同一份数据的拷贝,而是不同视角、不同粒度、不同裁决权的事实集合;
-
世界模型(World Model):不止描述"世界是什么样",更重要的是规定"在此世界下,什么行动被允许、何时可执行、如何退化与如何对齐"。
DMWM 的核心目标不是追求全局强一致,而是在现实约束下实现三件事:
-
可行动:每个节点都能在自身时标内给出可执行决策;
-
可协调:多主体行动不会互相破坏(冲突、死锁、互锁违规);
-
可治理:系统能被诊断、可回放、可回归、可审计与可演进。
2. 世界片段与职责分配
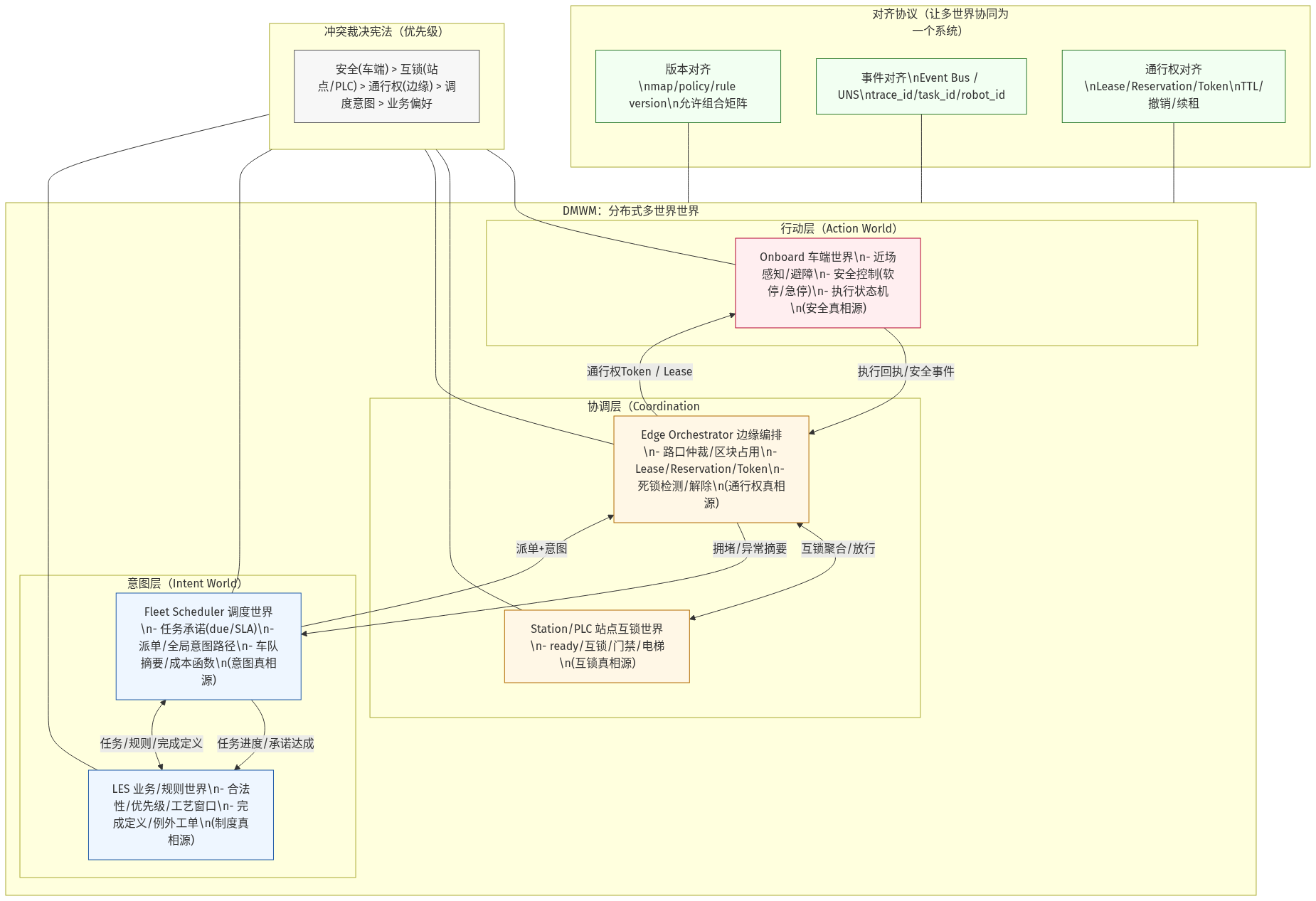
DMWM 将"世界"拆分为若干世界片段(World Fragments),分别驻留于典型的四类节点:车端、车队调度、边缘编排(L2.5)、物流执行系统(LES)。各世界片段的内容、时标与裁决权不同。
2.1 车端:行动层世界(Action World)
车端维护"近场可行动世界",以安全与即时执行为第一优先级,主要包含:
-
自身状态(姿态、速度、控制模式、健康度);
-
近场环境(障碍物、可通行区域、风险评估);
-
执行状态机(任务阶段、站点交互进度、急停/软停状态)。
裁决权 :车端对"是否安全、是否可立即行动"拥有最终裁决权。
时标:毫秒至秒级;允许局部正确,不要求全局一致。
2.2 车队调度:意图层世界(Intent World)
调度侧维护"全局意图世界",以任务承诺、全局资源配置与整体性能为第一目标,主要包含:
-
任务队列、优先级、截止时间与任务状态机;
-
派单决策与全局路径意图(意图≠现场可达事实);
-
车队状态摘要(可用性、能力、粗粒度位置/状态)。
裁决权 :调度对"谁做什么、何时应完成"的承诺与全局意图拥有裁决权。
时标:秒级至十秒级;容忍信息滞后,通过统计与策略维持稳态。
2.3 边缘编排(L2.5):协调层世界(Coordination World)
边缘侧维护"秩序与通行权世界",以多车协调、交通秩序、资源互斥与互锁合规为第一优先级,主要包含:
-
路口仲裁、区块占用/预定、会车规则、死锁检测与解除;
-
站点互锁聚合(电梯/自动门/输送线/工位 ready 信号)与放行控制;
-
临时规则与局部地图变更(封路、限速、危险区域切换)。
裁决权 :边缘对"通行权/资源占用/互锁放行"通常拥有最终裁决权。
时标:百毫秒至数秒级;在局部区域内更倾向于强一致或租约式一致。
2.4 LES:业务规则世界(Business/Rule World)
LES 维护"业务合法性与完成定义世界",以制度一致性、可审计性与业务闭环为第一目标,主要包含:
-
订单/波次/补料策略、工艺窗口、班次规则与优先级制度;
-
任务"何为有效完成"的定义与确认机制(签收/扫码/PLC 信号等);
-
例外工单与业务处置流程。
裁决权 :LES 对"任务是否应被发起、是否合规、是否算完成"拥有裁决权。
时标:分钟级至小时级;强调制度一致与审计留痕。
3. "真相源"分布:裁决权机制
DMWM 的关键不在于"多处存一份世界",而在于真相源(Source of Truth)分布式分配:
-
车端裁决"安全可行动性";
-
边缘裁决"通行权与互锁";
-
调度裁决"任务承诺与意图";
-
LES 裁决"业务合法性与完成定义"。
因此,DMWM 的一致性不是靠一个统一数据库实现,而是靠一套冲突裁决与优先级宪法实现。工程上通常遵循如下原则(可作为规范条款写入):
-
安全裁决优先于效率优化;
-
互锁合规优先于调度意图;
-
通行权优先于路径意图;
-
业务规则以"准入门禁"形式进入控制链条,而非事后纠偏。
4. 对齐协议:多世界如何协同成为"一个系统"
在分布式多世界中,"对齐(Alignment)"不是一次性同步,而是持续的协议化协作。DMWM 依赖以下三类对齐协议将世界片段粘合成可运行整体。
4.1 版本对齐协议(Version Alignment)
为避免"同一道路/规则在不同世界中含义不同",系统必须强制维护:
-
地图版本(map_version)、策略版本(policy_version)、规则集版本(rule_version)
贯穿车端、边缘、调度与 LES。任何跨版本组合必须在"允许矩阵"中显式声明;否则视为不可发布状态。
4.2 事件对齐协议(Event Alignment)
DMWM 通过事件流而非强同步复制对齐事实:
-
LES 发布任务与规则事件;
-
调度发布派单与意图事件;
-
边缘发布通行权/互锁放行事件;
-
车端发布执行回执与安全事件。
系统以事件的"发生顺序、版本上下文与关联键"来建立可追溯的运行事实。
4.3 租约/预定协议(Lease & Reservation)
在交通与资源互斥问题上,靠"共享真相"难以实现实时一致;DMWM 采用租约/预定使未来行动可协调:
-
区块占用租约(block lease)、路口通行 token、电梯预约 token;
-
租约具有 TTL 与可撤销机制;
-
车辆在获得通行权后执行,若租约失效或冲突,则进入等待/重规划/降级。
租约机制的本质是:通过约束行动来制造一致性,从而把协调问题从"认知一致"转化为"通行权一致"。
5. 一致性策略:从"强一致幻觉"到"有界不一致"
DMWM 并不追求全局强一致,而追求有界不一致(Bounded Inconsistency):
-
明确哪些状态必须局部强一致(如路口占用、互锁放行);
-
明确哪些状态可最终一致(如车队位置摘要、任务统计);
-
为每类状态规定 TTL、刷新频率、过期处理与降级策略。
当一致性超界(例如位置摘要过期、地图版本漂移、互锁状态不可用)时,系统必须进入预设降级:冻结派单、切换保守交通模式、局部封路、请求人工确认等。降级不是"故障应急",而是 DMWM 的正常工作模式之一。
6. 证据链:让多世界可诊断、可回放、可回归
多世界系统若缺少证据链,将不可治理。DMWM 的证据链原则是:
-
任何一次关键决策(派单、仲裁、放行、急停)必须可追溯到"当时各世界看到的状态";
-
证据链必须跨越节点边界,以统一关联键串联。
建议强制使用的关联键包括:
event_time(统一时钟)、trace_id、robot_id、task_id、map_version、policy_version。
证据链按三层组织:
-
车端证据(轨迹、避障、急停、健康);
-
系统证据(派单候选集、约束命中、仲裁记录、租约状态);
-
治理证据(版本对齐矩阵、配置快照、灰度开关、变更审计、回归覆盖)。
7. 工作机理总结:DMWM 的"运行循环"
DMWM 的工作过程可概括为一个持续循环:
-
规则与任务注入(LES):发布业务规则、任务与完成定义;
-
意图生成(调度):依据任务与车队摘要生成派单与路径意图;
-
秩序制造(边缘):将意图转换为可执行的通行权、互锁放行与局部秩序(租约/仲裁);
-
安全执行(车端):在近场世界内执行动作,并以安全为硬约束进行必要干预;
-
回执与对齐(全链路):执行回执与异常事件回流,触发重规划、降级与治理闭环;
-
证据固化与回归门禁(治理层):将断点、证据与变更纳入回归套件,阻止同类失配再次进入系统。
该循环使 AMR 系统在"多源真相、分层时标、局部一致"的现实条件下仍可维持稳定现象:安全边界、时效分位数、吞吐下限与可恢复性。
8. 结语:DMWM 的工程价值
AMR 的 DMWM 并非"复杂化",而是把工业现场的真实复杂性从"隐含假设"转为"显式机制"。其价值体现在:
-
通过裁决权分配与对齐协议,将多主体协作从"碰运气"变为"可验证的秩序";
-
通过有界不一致与降级策略,使系统在不可避免的缺测与延迟下仍可安全运行;
-
通过证据链与回归门禁,使系统具备可治理与可演进能力,避免"越迭代越不可控"。
------以上即为 AMR 分布式多世界世界模型的工作原理说明。