2 特征提取
1.边缘提取
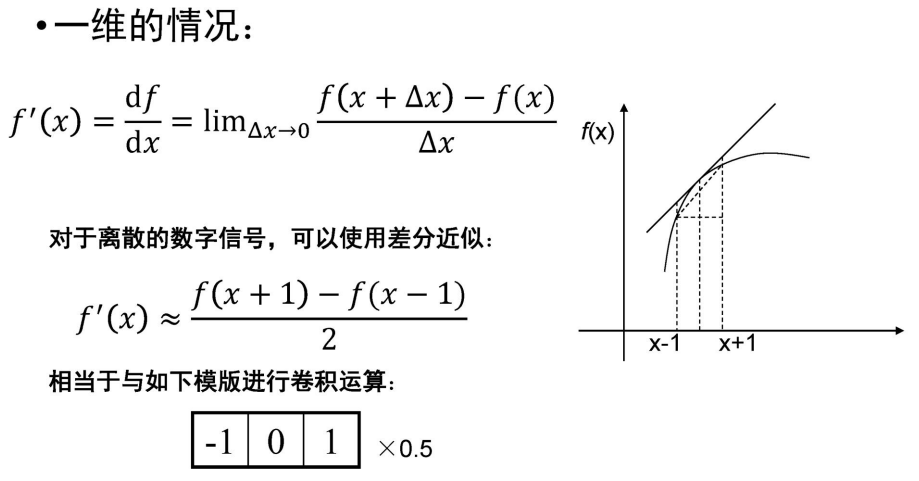
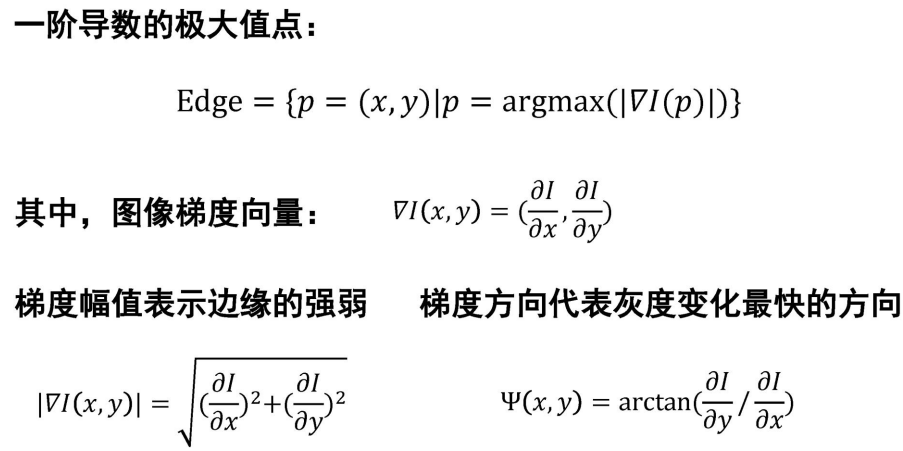
图像微分算子
-
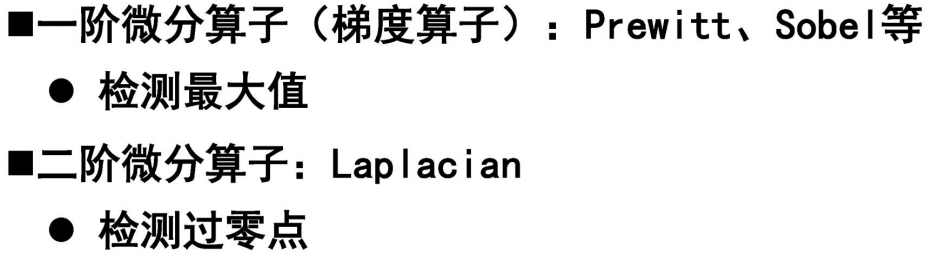
一阶导数(梯度)度量"变化有多快",所以边缘处应当是一阶导数沿法线方向的极大值;
-
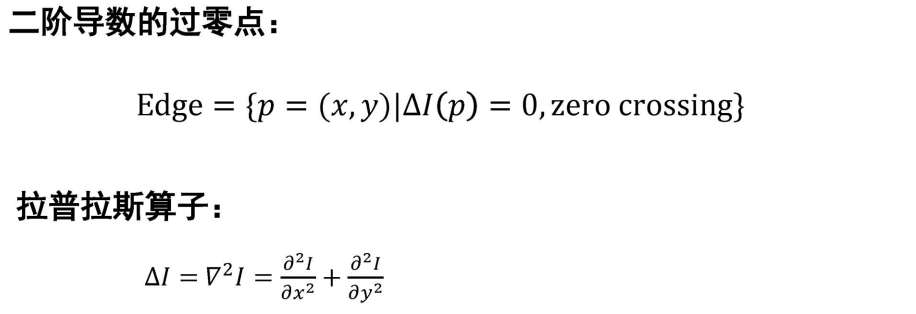
二阶导数度量"一阶导数变化的变化",一阶导数取得极值的地方根据微积分必有二阶导数为零(且变号) ,因此也会出现二阶导数的过零点(zero-crossing)。
一维信号
二维信号
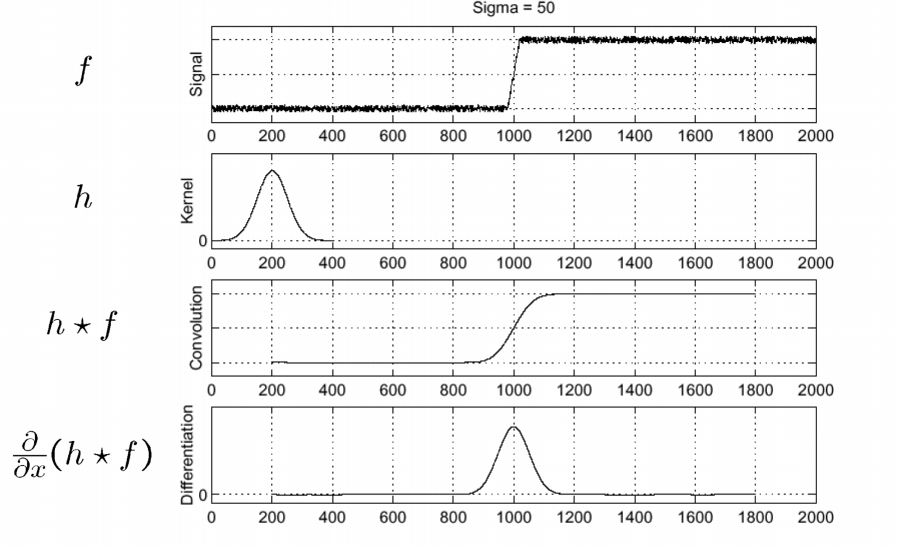
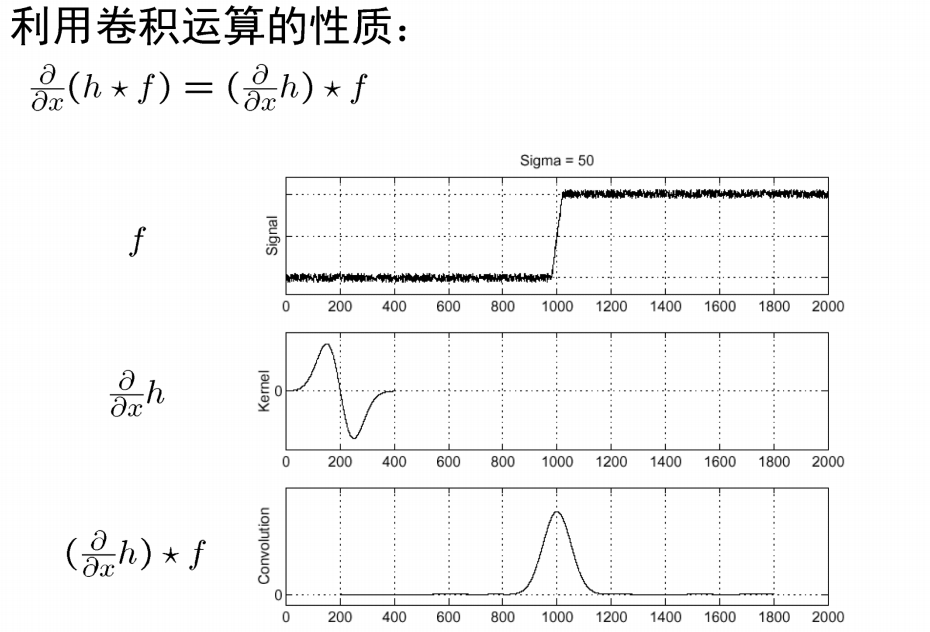
噪声的影响
先进行滤波

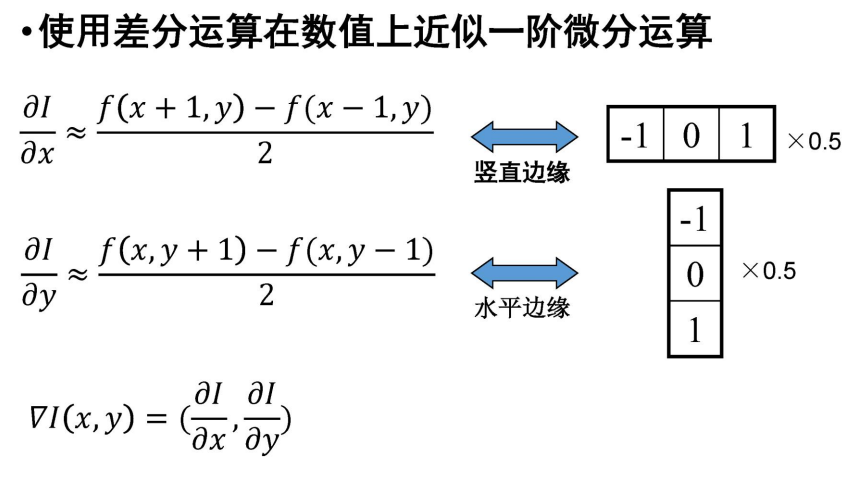
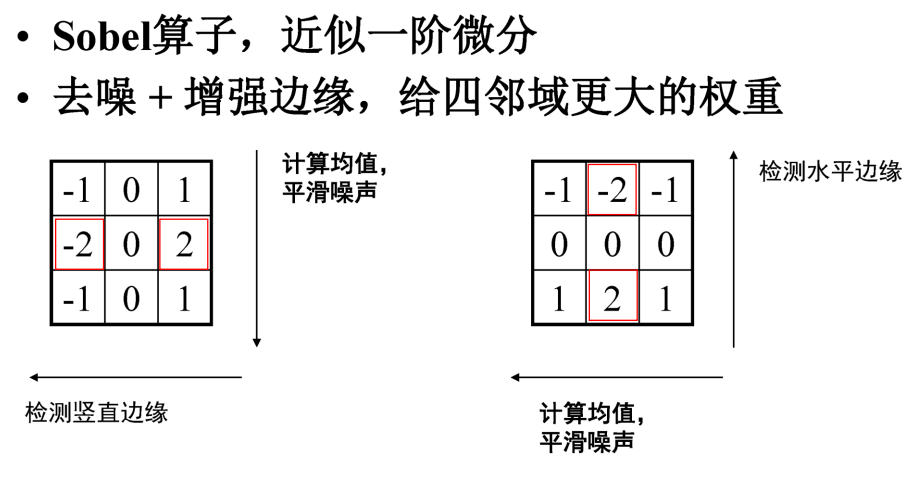
图像梯度算子的近似

Sober 算子
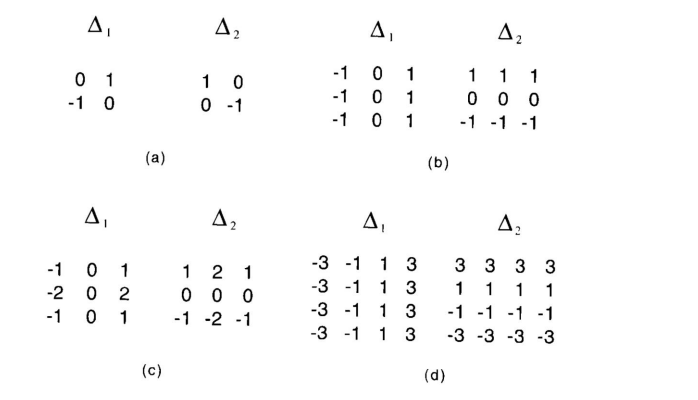
常见的梯度算子
拉普拉斯算子
二阶微分
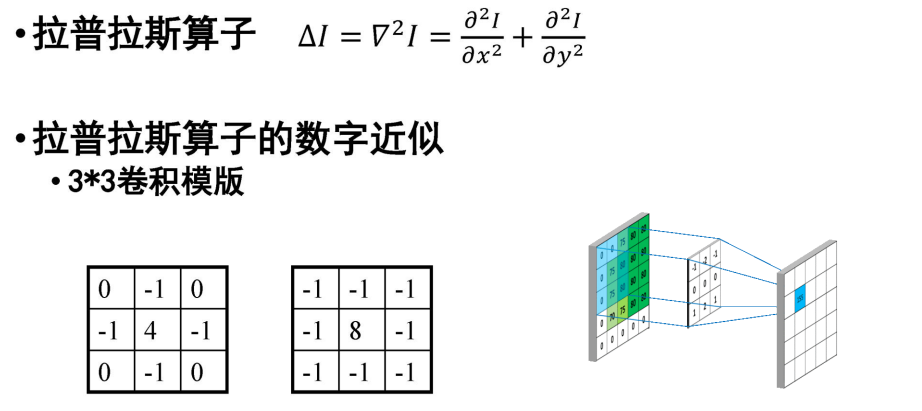
特点
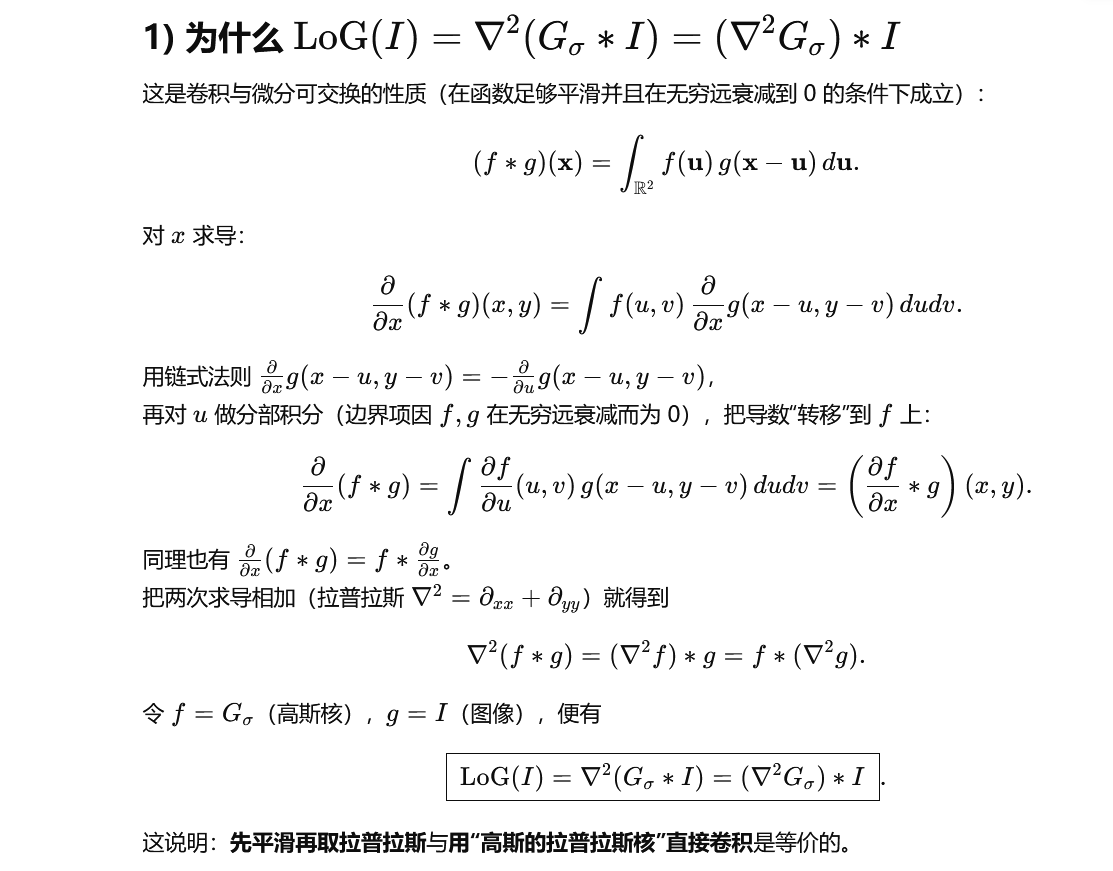
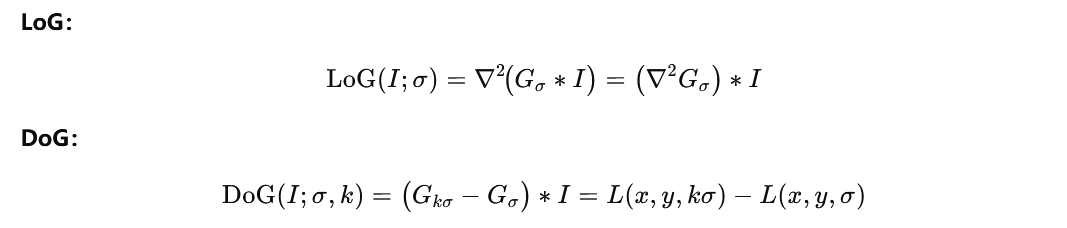
高斯拉普拉斯
Laplacian of Gaussian(LoG)
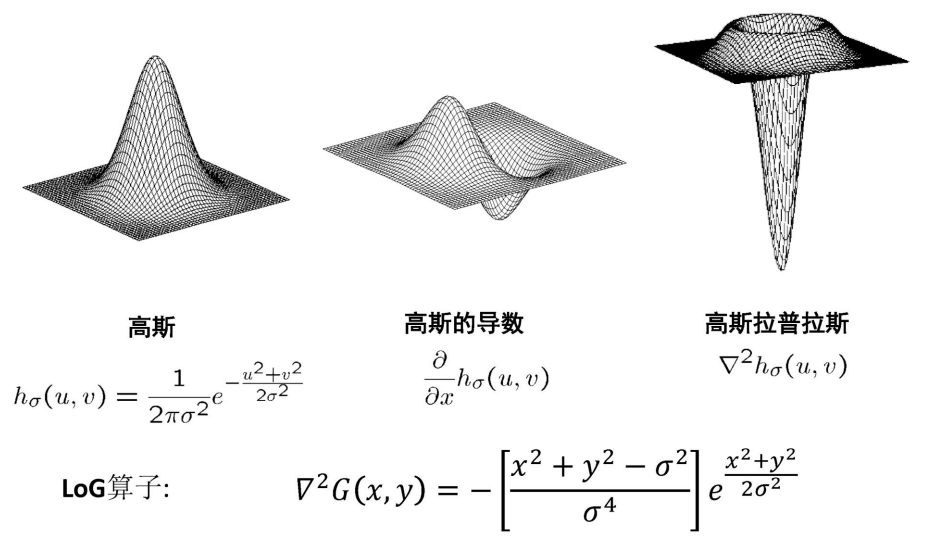

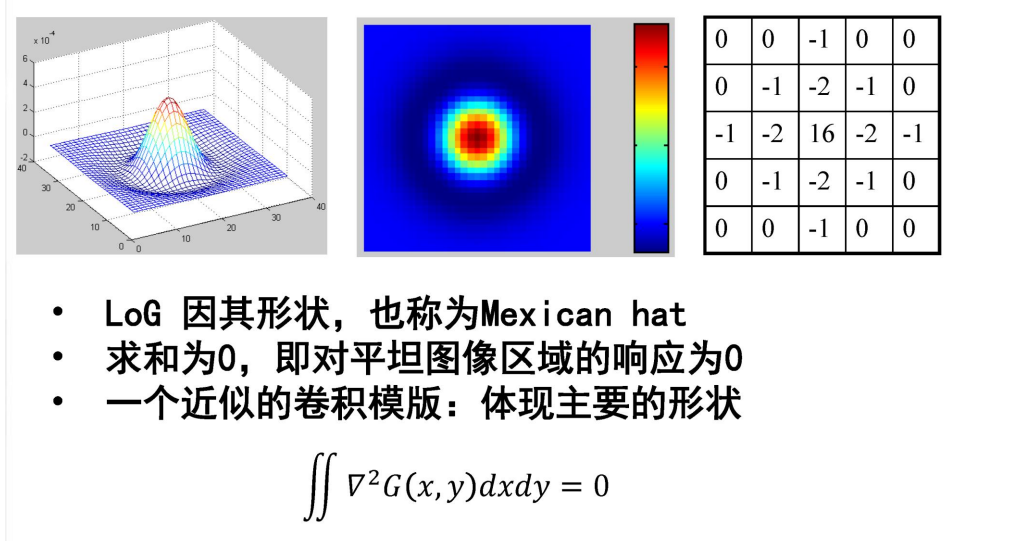
正面积 = 负面积 ,所以整体积分为 0 。这意味着:对完全平坦的图像(像素全是常数)卷积输出为 0 ------ 不会凭空产生响应(抑制 DC 分量)
"DC 分量"= 零频(直流)分量 ,就是信号里不随位置/时间变化的常量部分。
- 在图像里,它就是整幅图的平均亮度(全体像素的均值/背景偏置)
****这等价于滤掉 DC 分量 :整体加/减亮度不会引起响应,只对局部变化(AC 分量)---边缘、斑点---有响应。

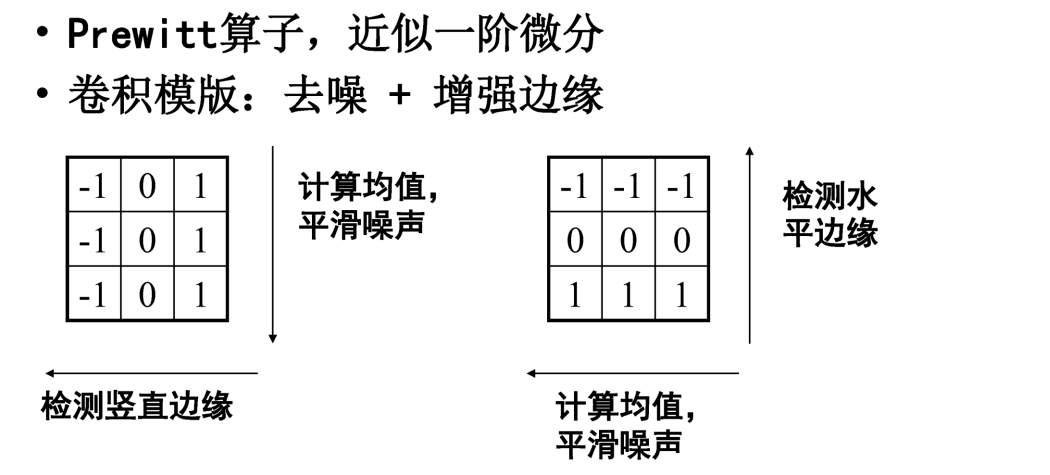
Prewitt 算子
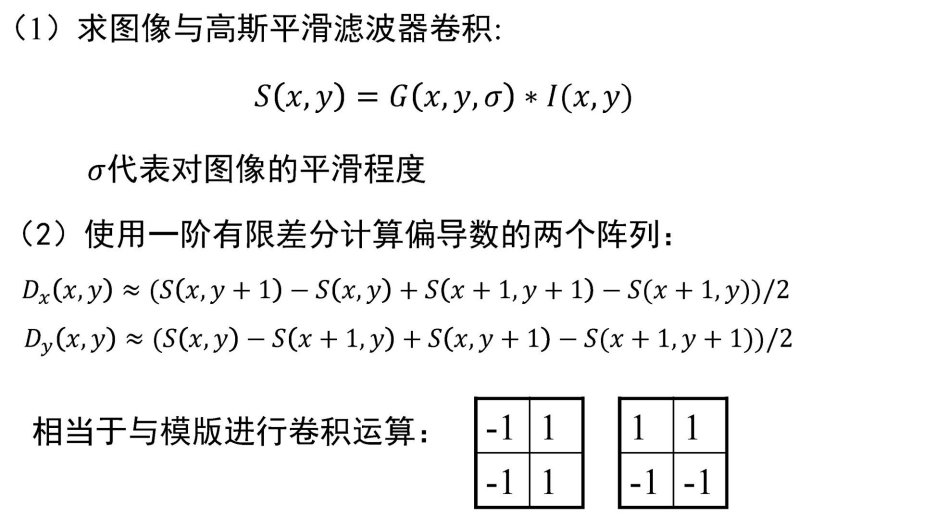
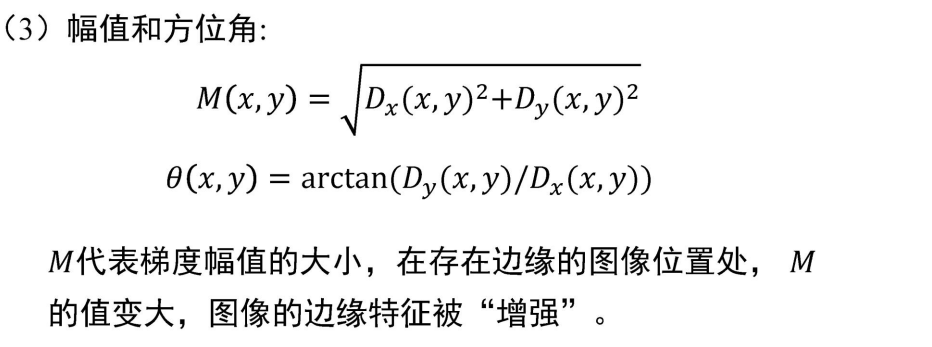
Canny边缘检测器
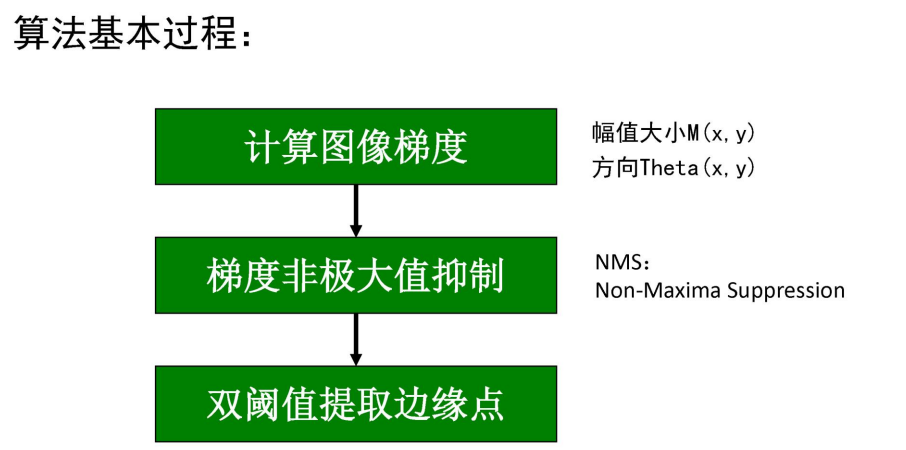
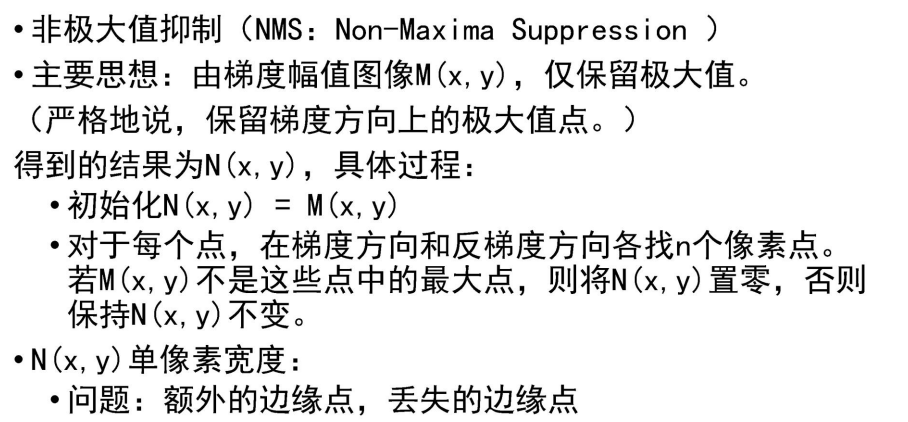
非极大值抑制


2.图像特征点提取
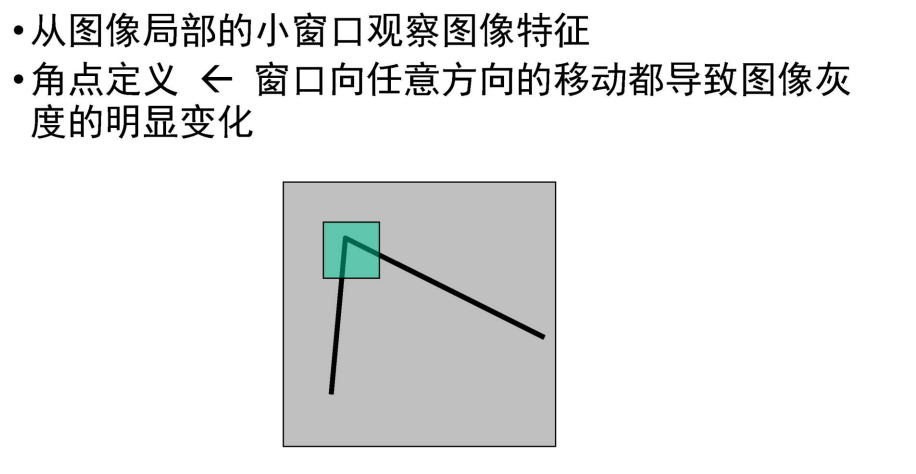
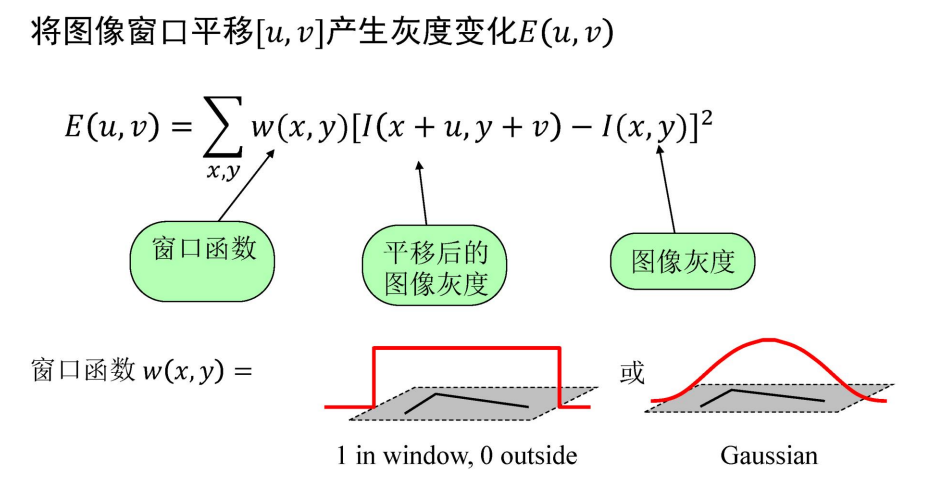
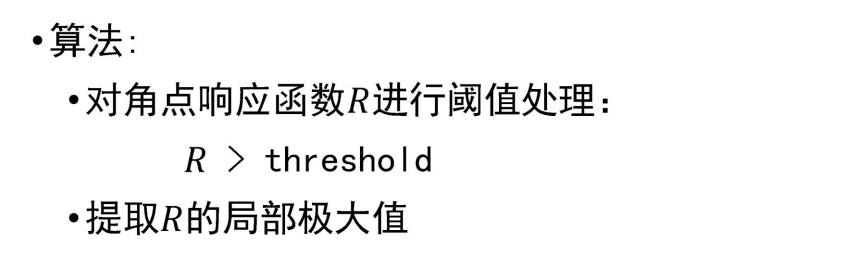
角点检测

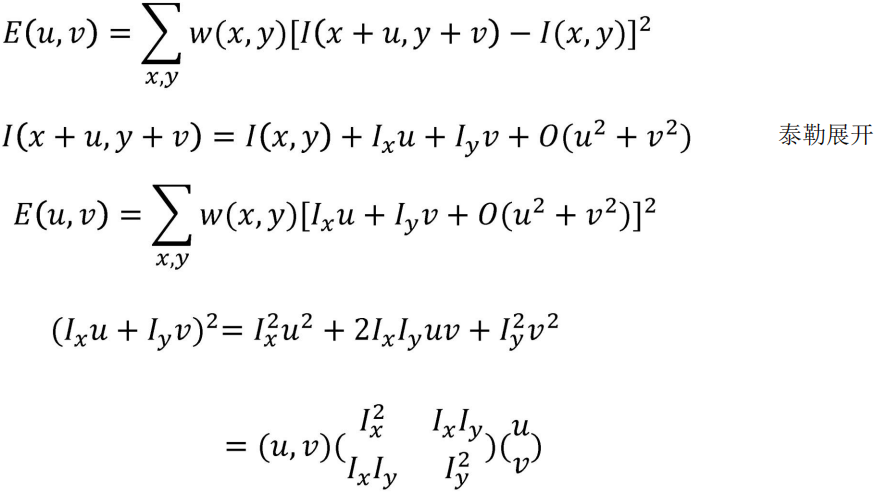
Harris角点检测
基本思想
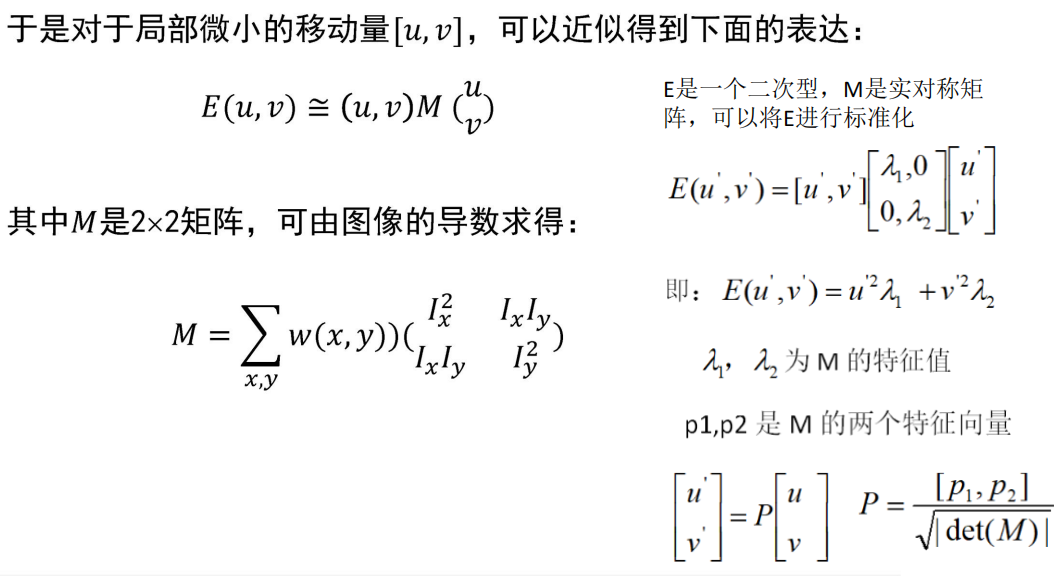
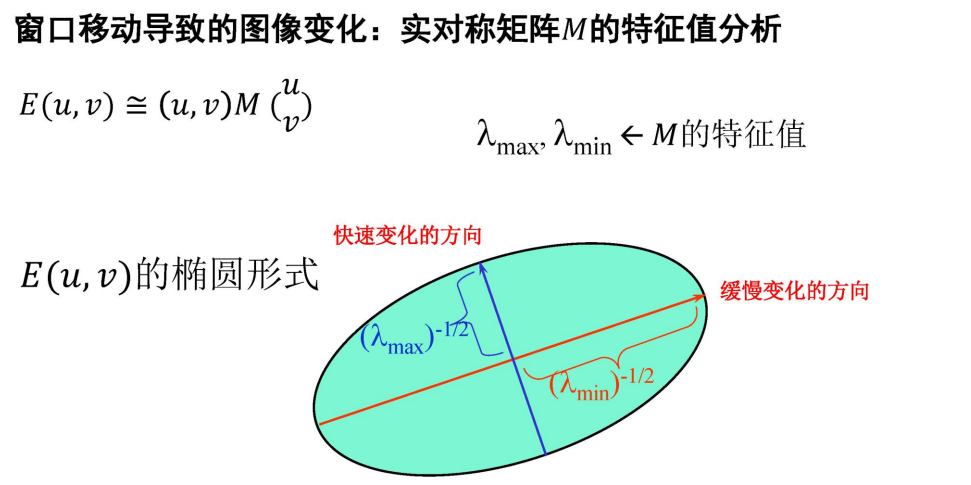
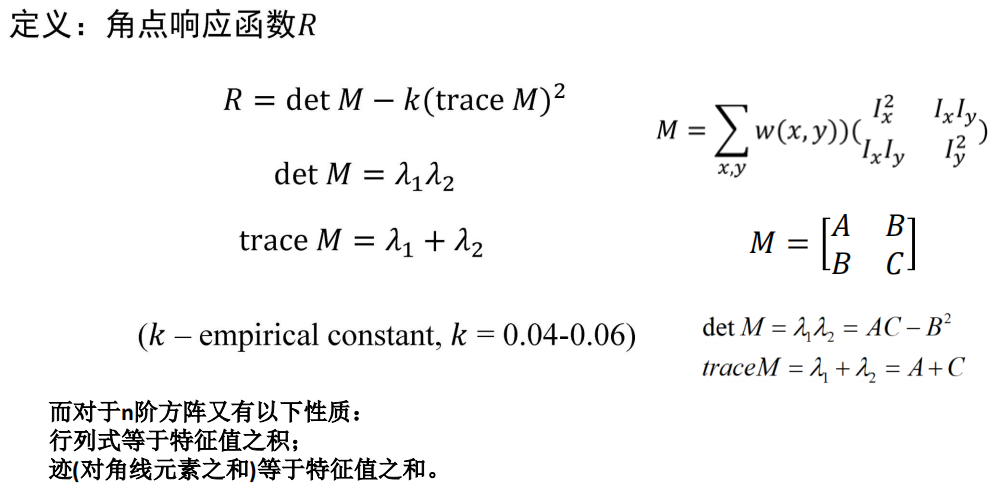
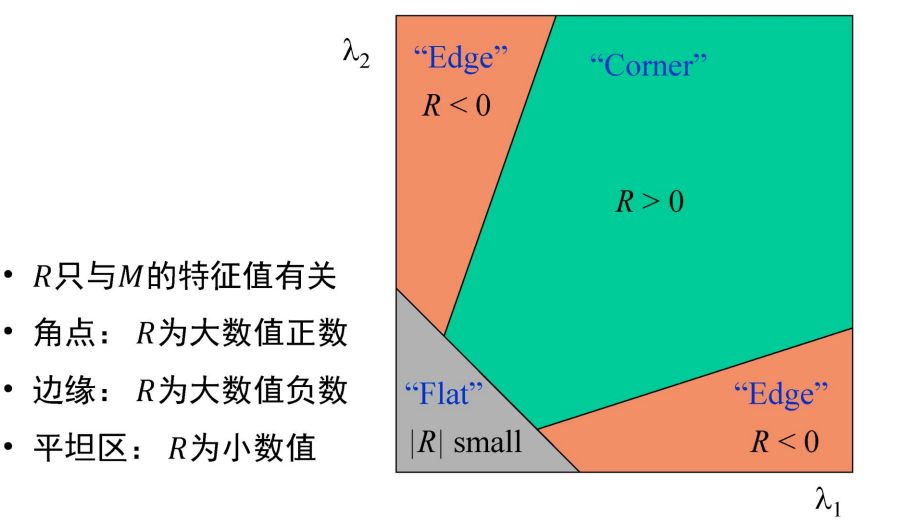
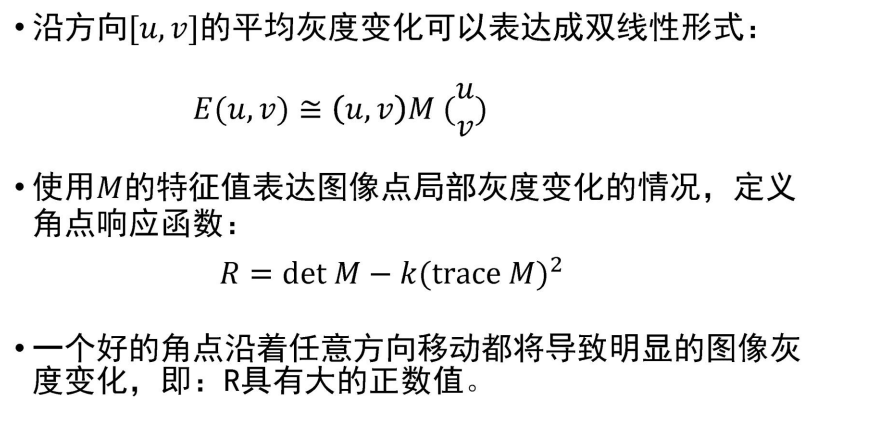
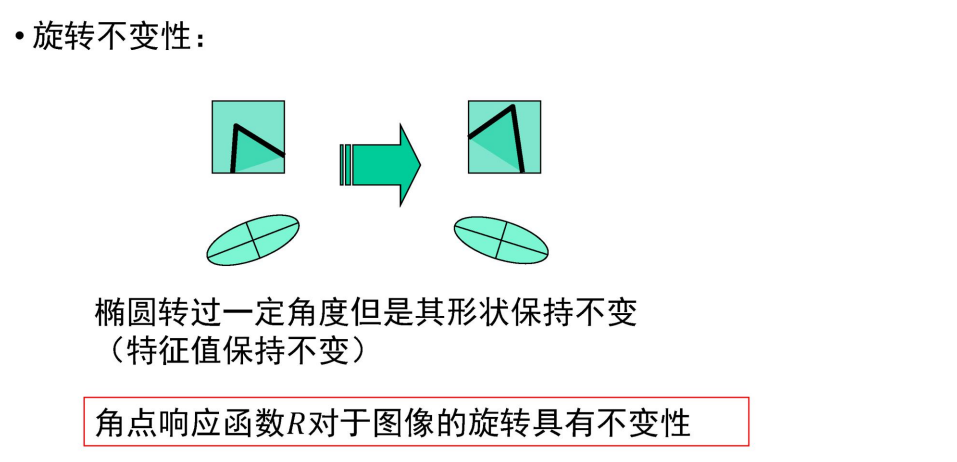
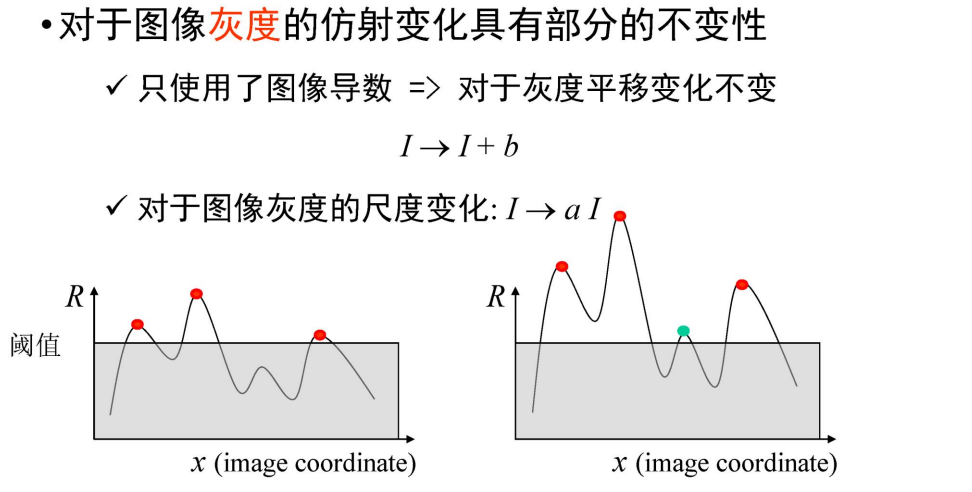
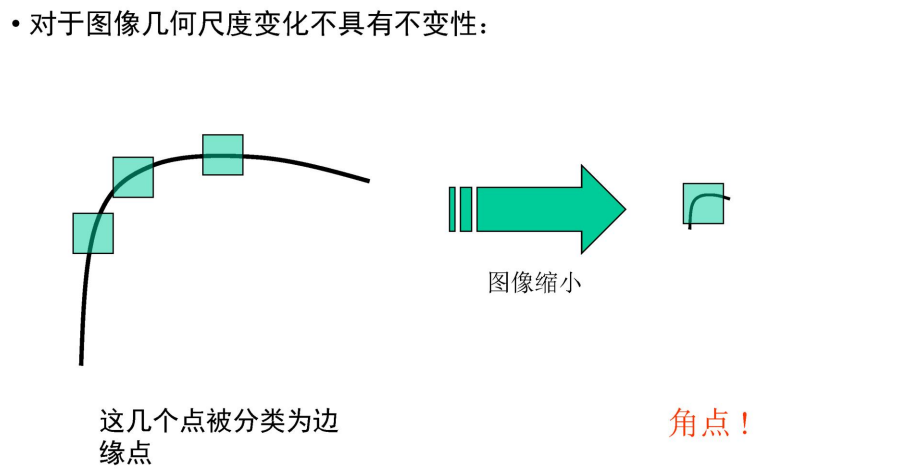
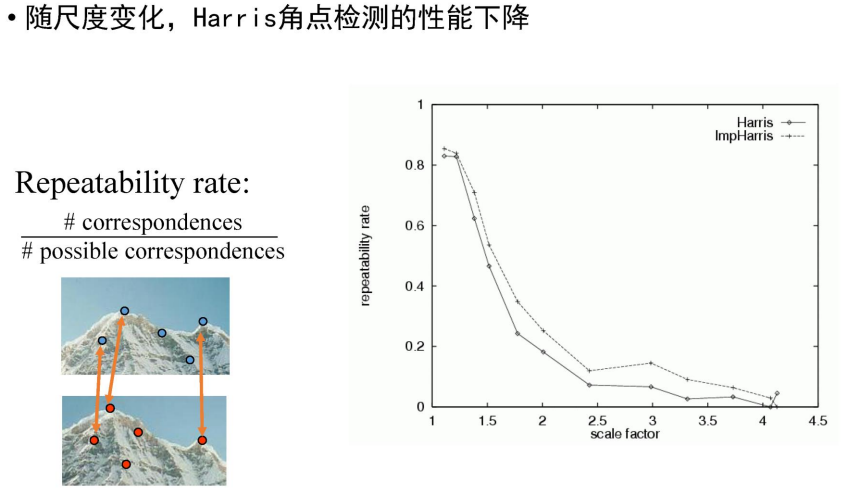
性质
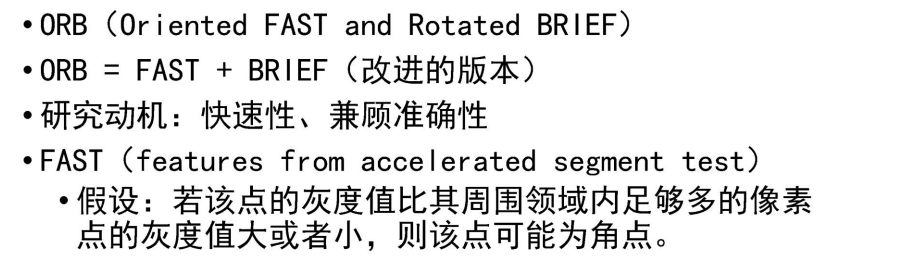
ORB特征检测
3 特征点提取与描述
1.图像特征点提取

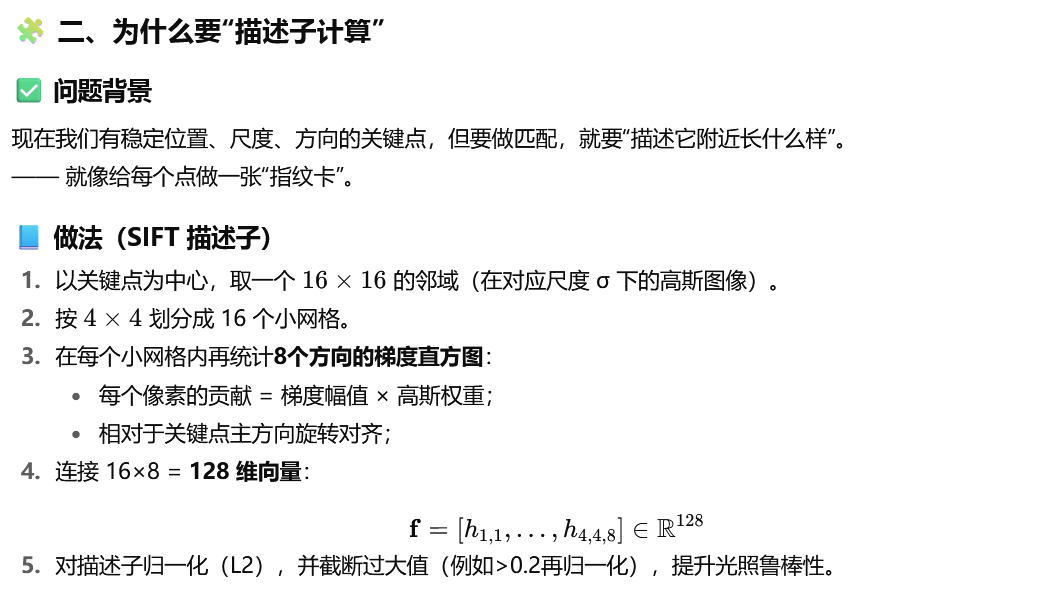
SIFT
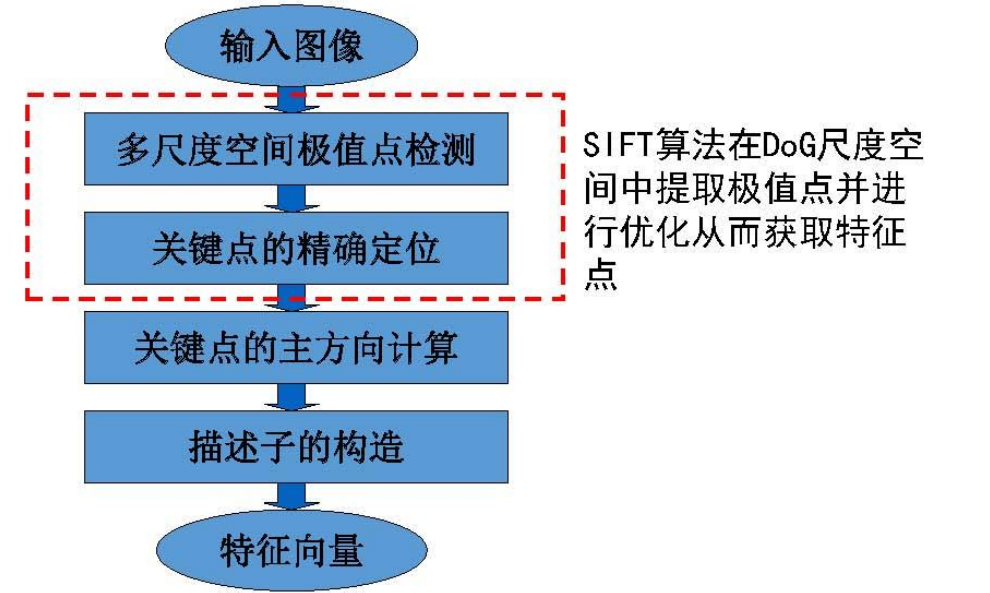
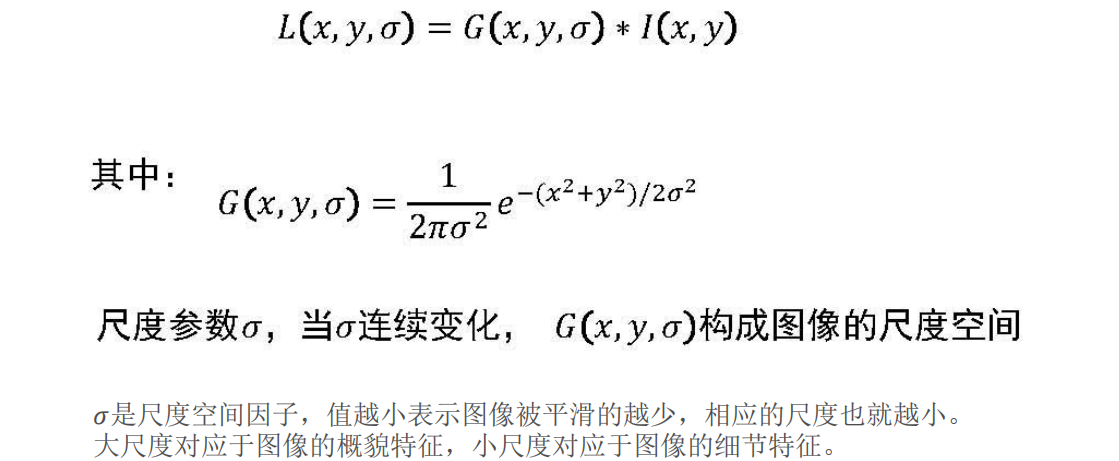
尺度空间就是:把同一幅图在一系列"模糊尺度"下的版本 L(x,y,σ),用来表示图像在不同尺寸/分辨率下的结构
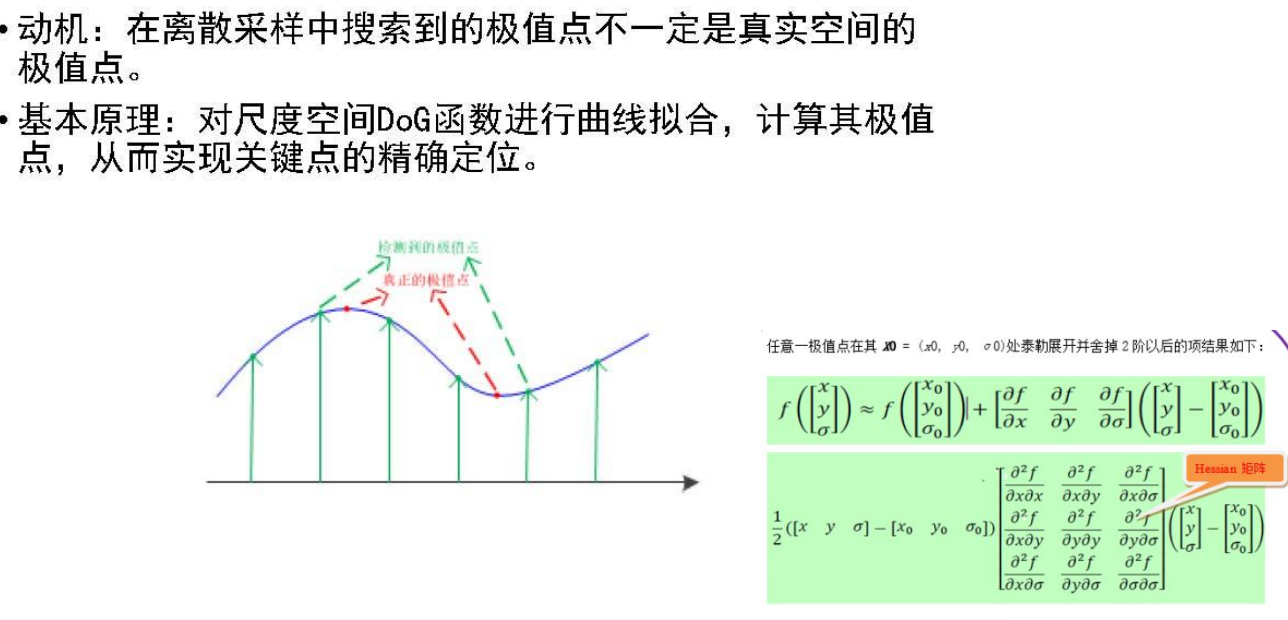
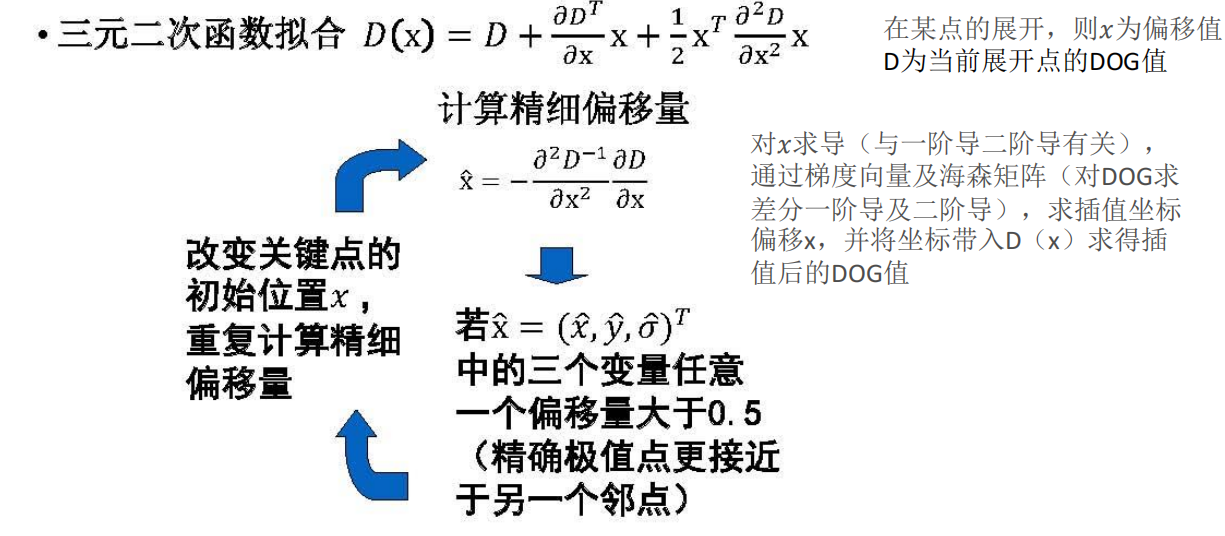
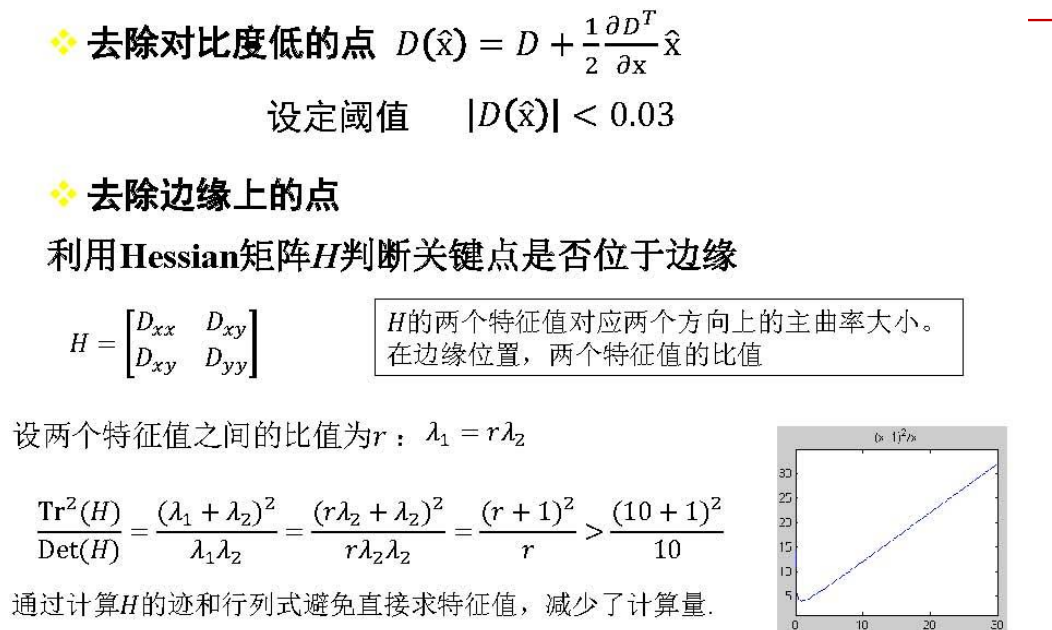
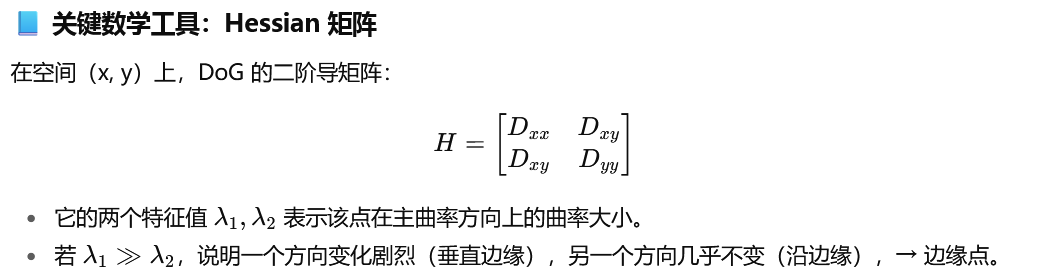
关键点的精确定位
-
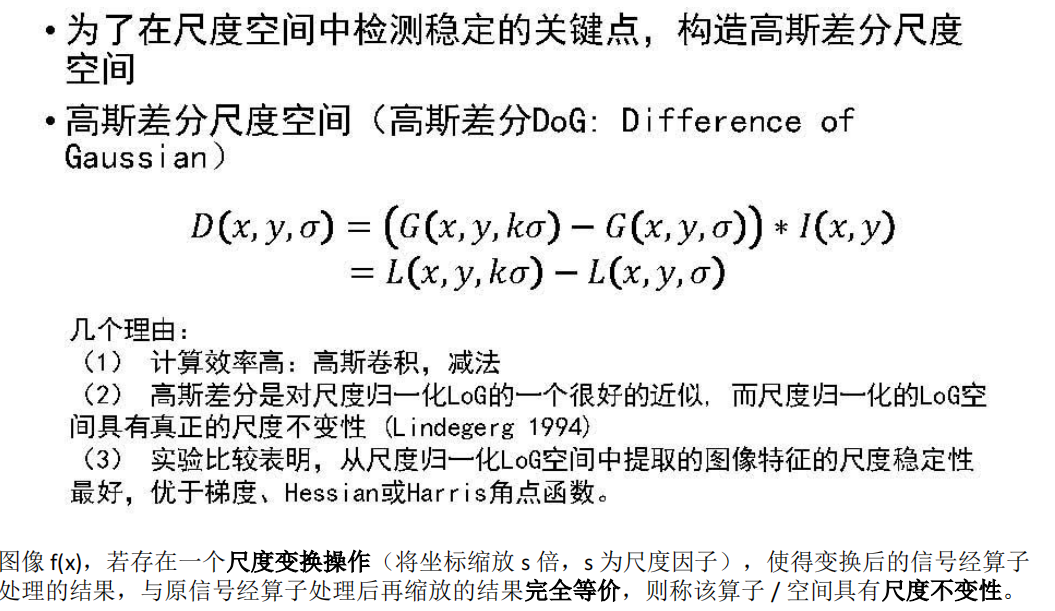
DoG 金字塔是离散的(每层代表不同的 σ\sigmaσ,每个像素有一个 DoG 值)。
-
直接取最大/最小值,只是"采样网格上的极值",可能与连续真实极值偏离。
-
为了得到更稳定的关键点位置(尤其是跨尺度一致性),SIFT 在 3D 空间 (x,y,σ)(x, y, \sigma)(x,y,σ) 上拟合局部二次曲面 ,找到 DoG 的连续极值位置。
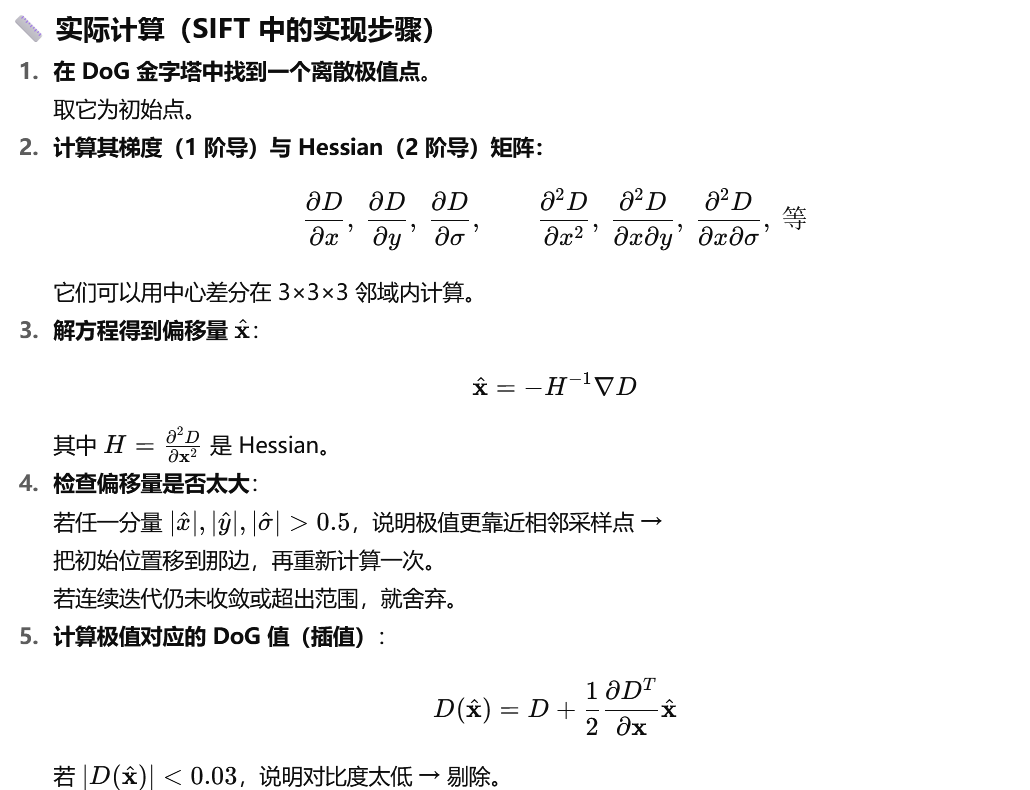
去除不稳定的点

这样,每个关键点就有了自己的"局部坐标
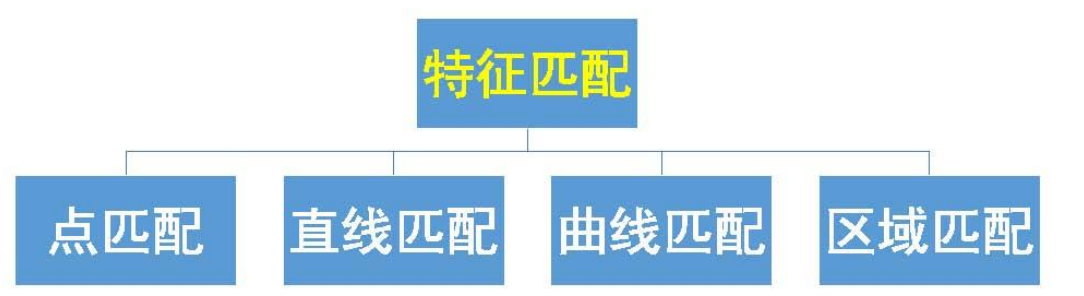
2.图像特征点描述与匹配
点匹配的基本原则
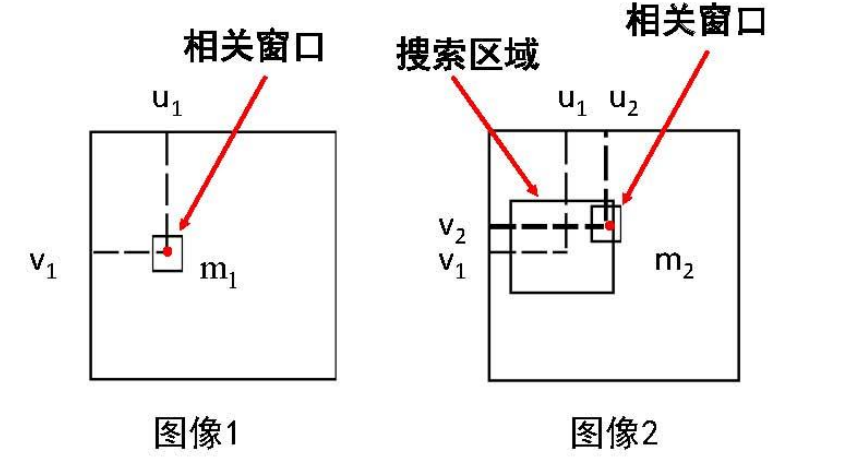
相关窗口和搜索区域
相关函数
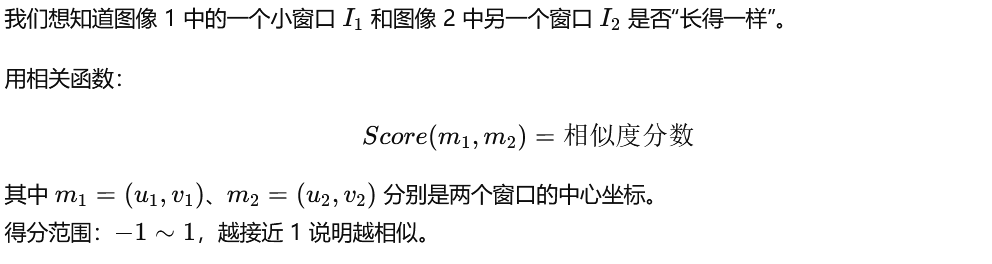
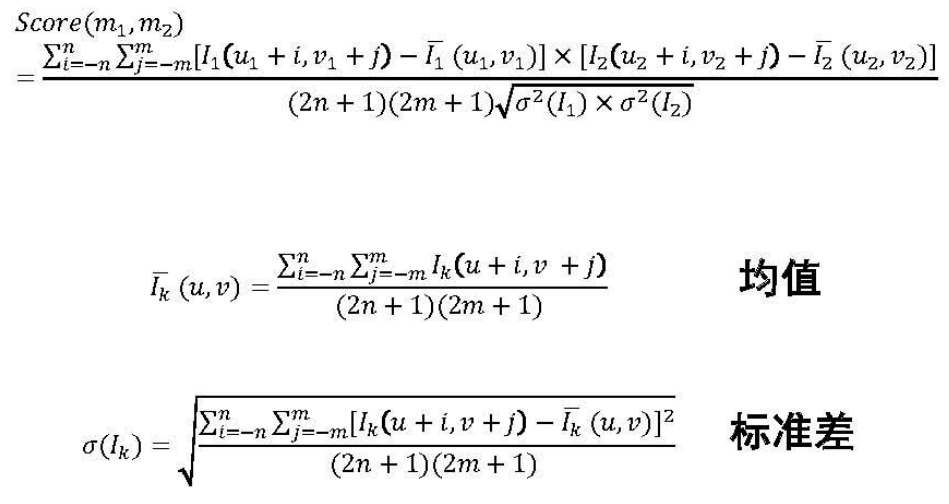
I代表 图像中某一点的像素灰度值
SIFT 特征匹配算法
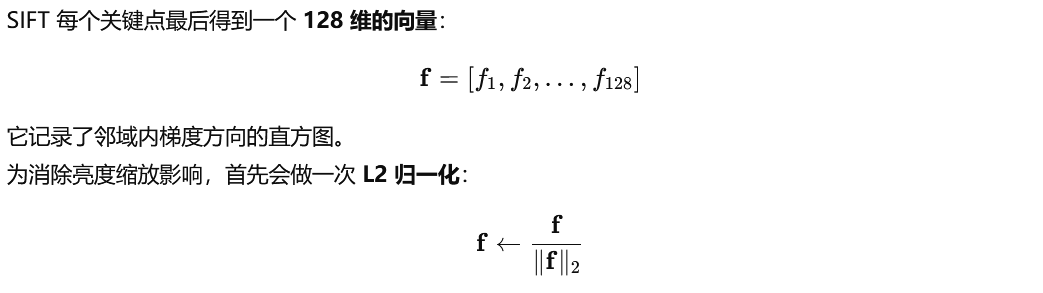
SIFT-描述子
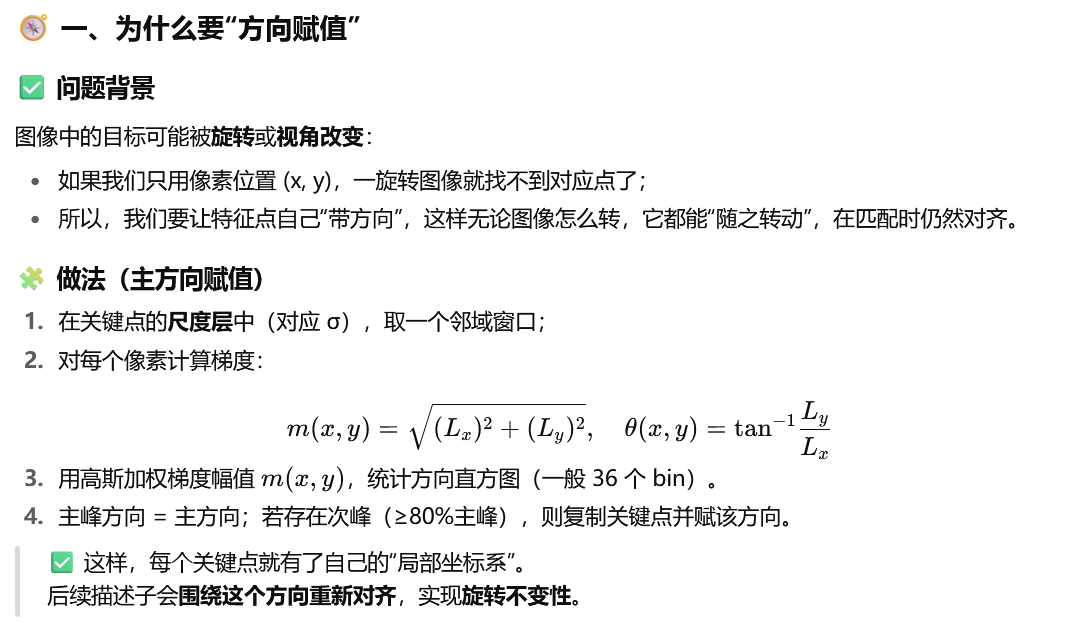
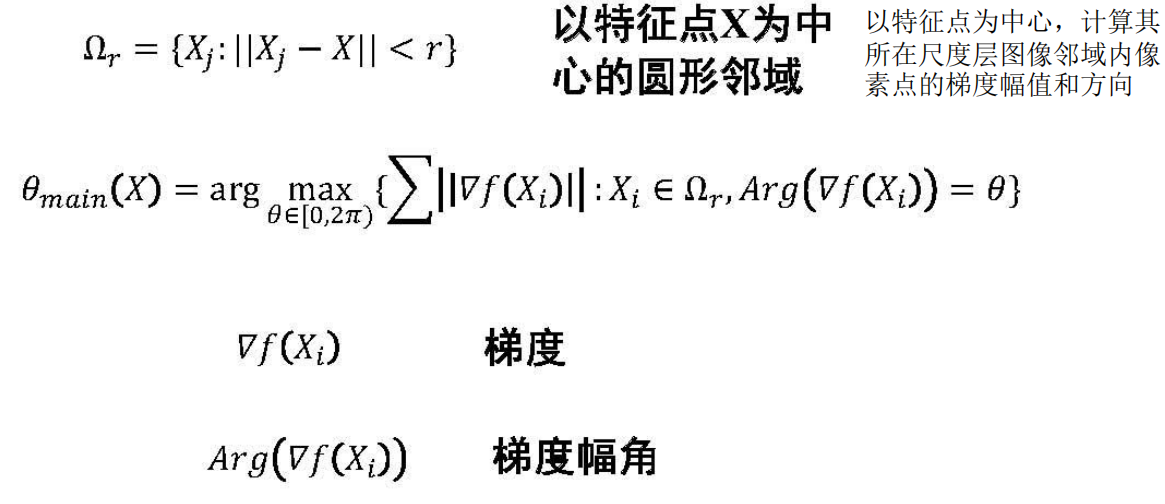
主方向计算
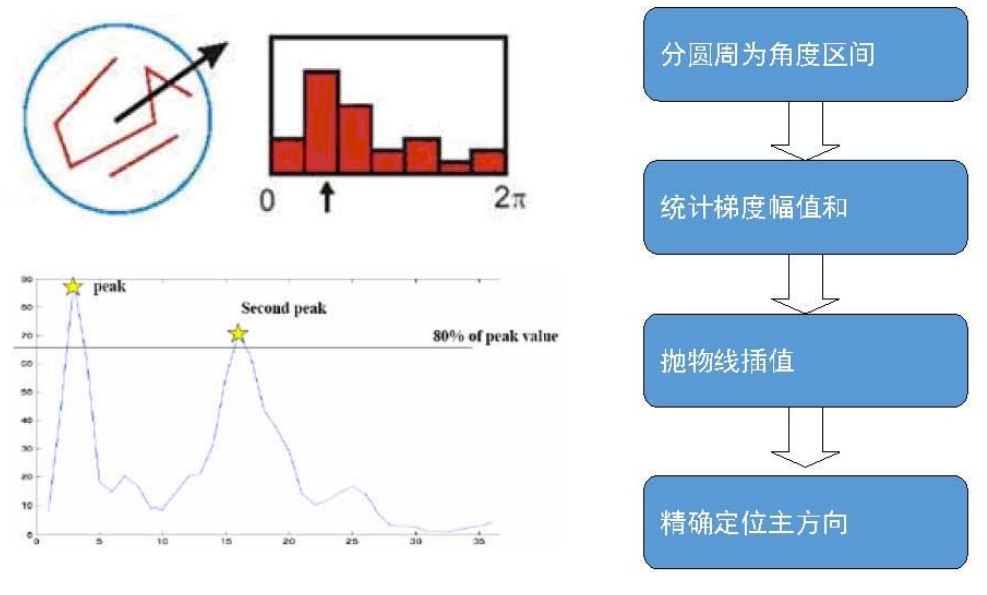
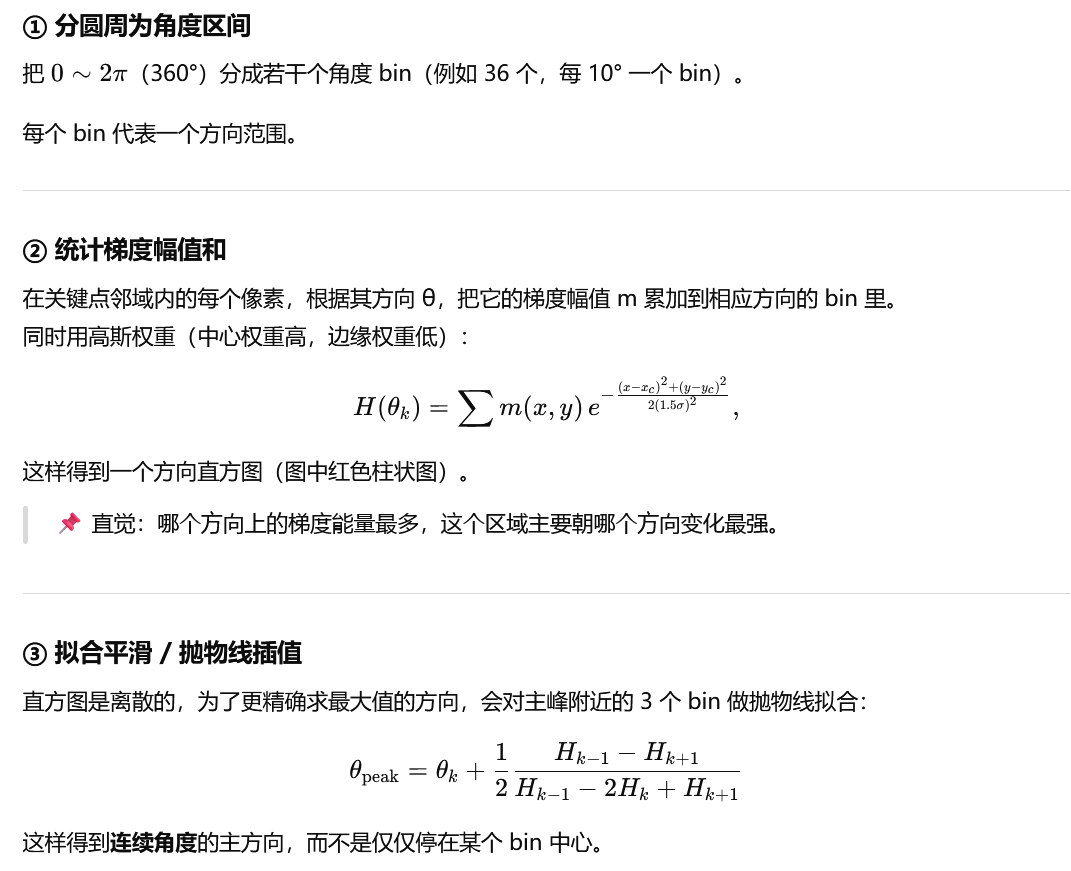
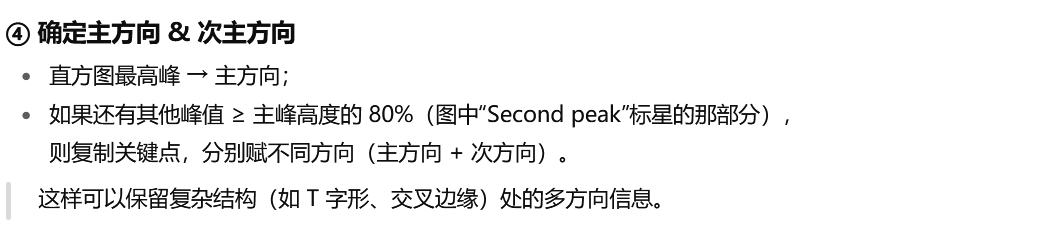
特征点主方向
ORB->BRIEF
3.基于DNN的特征描述自学习
4.空间点匹配
5.鲁棒估计:RNASAC
4 图像分割
图像分割方法
1.阈值法
如何选取合适阈值?
局部阈值方法,图像方块,按照块用不同阈值进行分割
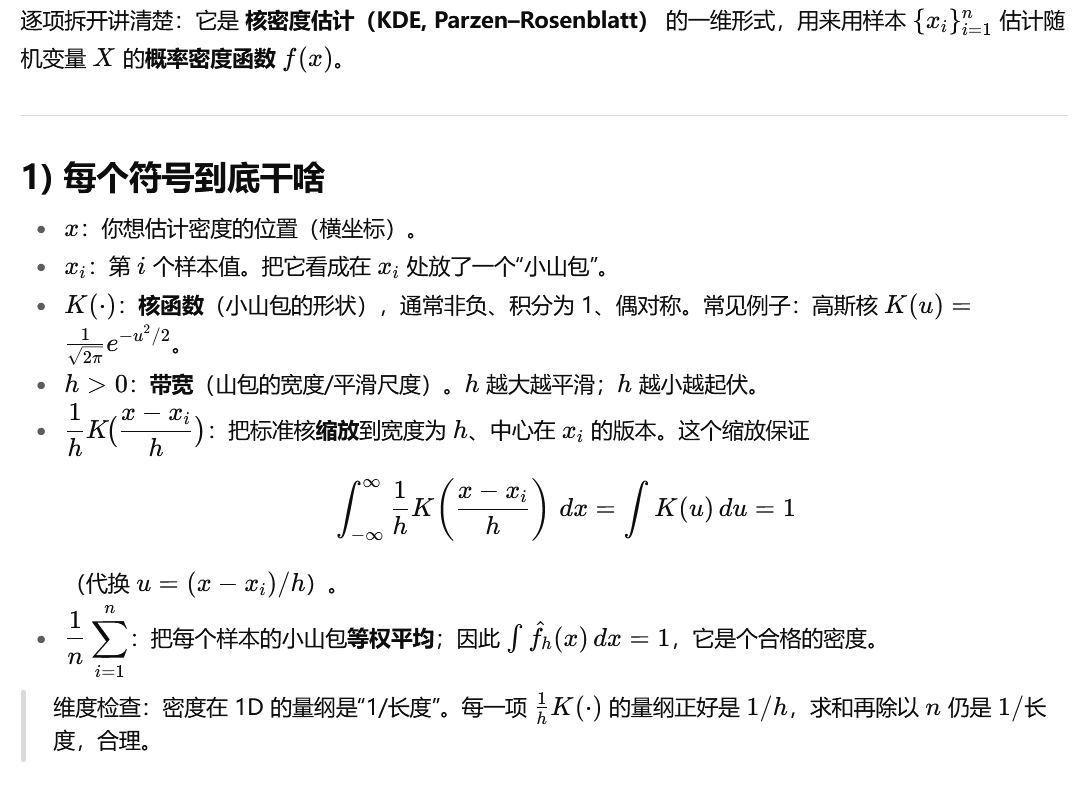
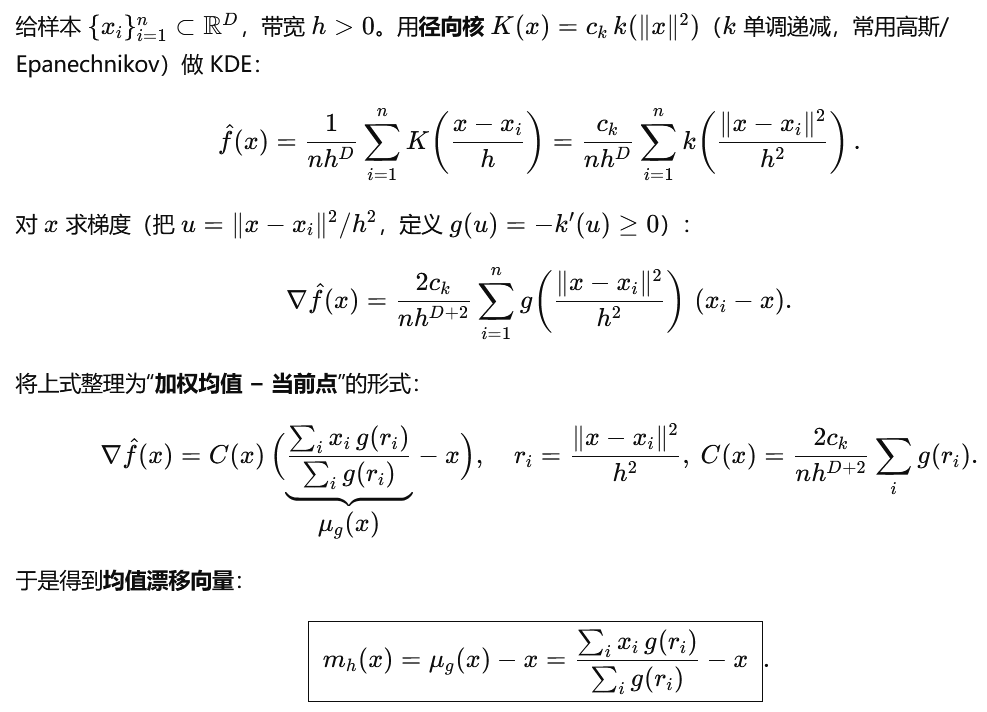
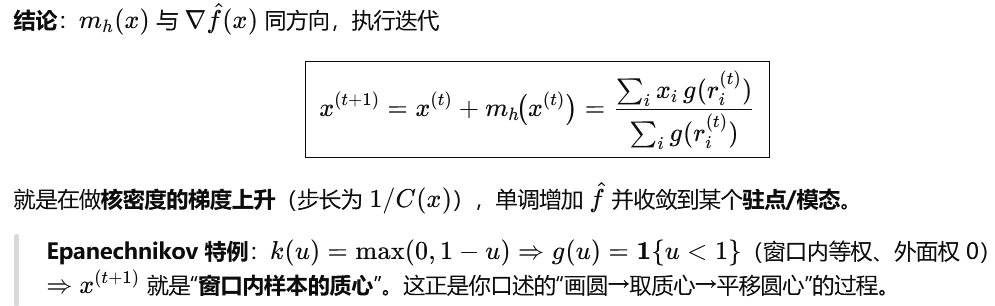
2.基于均值移动的图像分割方法
统计特征:像素个数多的范围内容可能是物体,波峰;波谷区分两个物品的界限
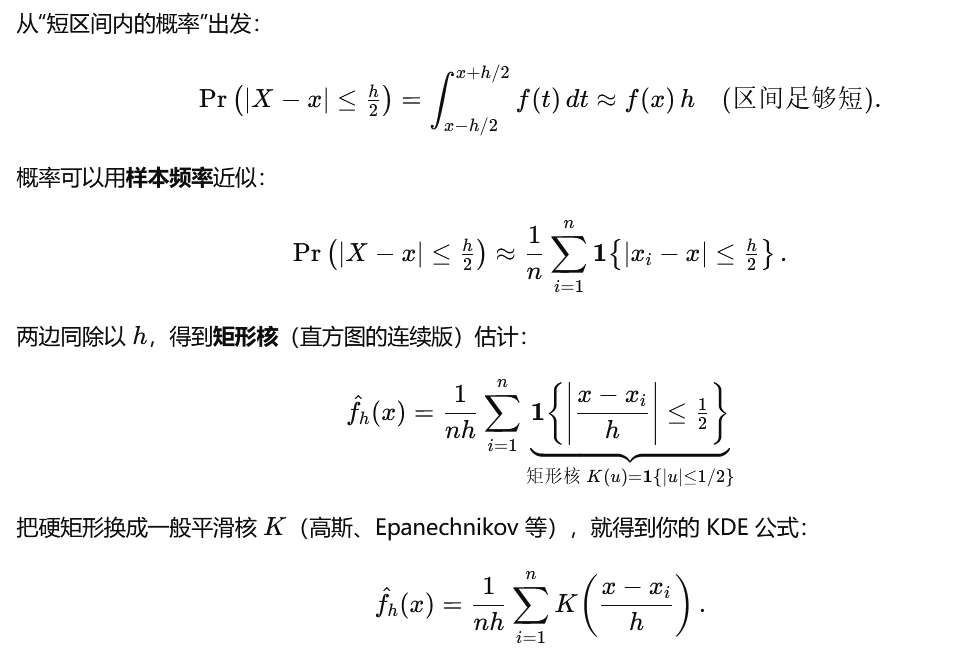
概率密度 近似 概率 近似 频率
不估计概率密度图像的参数,而是找最高点或是最低点
类似聚类方法
画出一个区域,计算质心,再以这个质心画圆,计算更新后的质心,最后质心收敛。这个过程中通过的质心可归为一类

3.图割
分为S和T两个集合
归一化割
建立邻接矩阵