你或许听过 "光子",却未必知道相机能精准 "数清" 光子的数量,更不清楚为什么实现这项能力会对相机本身提出极为苛刻的要求------这就是我们所说的光子数解析技术。
光的本质是无数光子的集合。当这些光子撞上相机传感器时,就会转化为可被设备捕捉的"光电子"。而 "光子数解析" 技术的核心,正是通过精准统计光电子的数量,来反向推算出光的实际强度。
但想要实现 "数清光子" 的目标,有一个绕不开的前提:相机的读出噪声必须远小于光电子信号量。打个比方,如果你要数清桌上的3颗豆子(对应3个光电子),旁边却总有1颗"假豆子"(对应读出噪声)干扰,自然没法精准统计;只有当"假豆子"远少于3颗时,才能清晰分辨真实豆子的数量。传统sCMOS相机虽一直以"低噪声"为核心卖点,但其读出噪声仍高于实际场景中的光电子信号,根本无法满足光子数解析的需求。

为了直观验证这一点,我们通过蒙特卡洛模拟,还原了"平均每像素3个光电子"场景下,不同读出噪声对像素输出的影响:当读出噪声降至0.3e⁻以下时,光电子的信号峰清晰可辨,能精准计数;而噪声稍高,信号峰就会被"淹没"。从下图中可以看出读出噪声对实现光子数解析的重要.
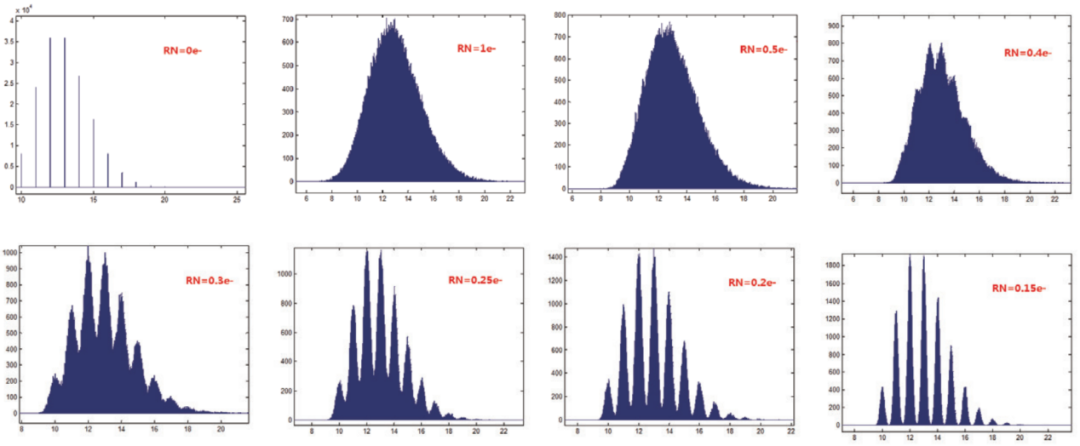
以上为蒙特卡洛模拟不同读出噪声下像素输出分布图
深视智能工程师通过对Solis B518科学相机的图像传感器调制以及对低噪声电路优化,使得Solis B518读出噪声再次突破极限,从0.45e-降低到0.31e-。
我们分别使用读出噪声0.5e-相机A和Solis B518科学相机进行弱光成像对比,获得相同场景的2张照片,并通过蒙特卡洛模型对光电子信号进行提取。
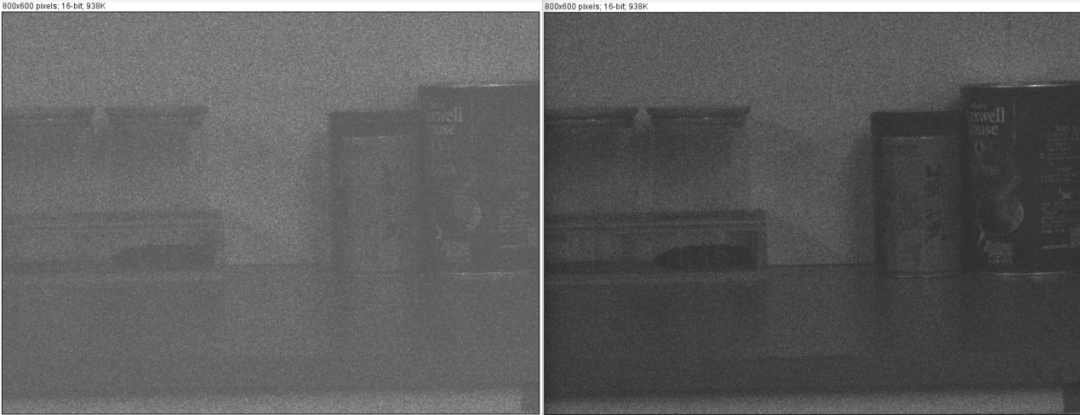
左图为相机A:0.5e-读出噪声;右图为Solis B518:0.31e-读出噪声
试验结果可以清晰的看到拥有更低读出噪声的Solis B518光电子的信号峰清晰可辨,而读出噪声更大的相机A虽然有峰,但是特征明显不足。实验证明更低的读出噪声可使得光子数解析更为精准,符合理论模型。
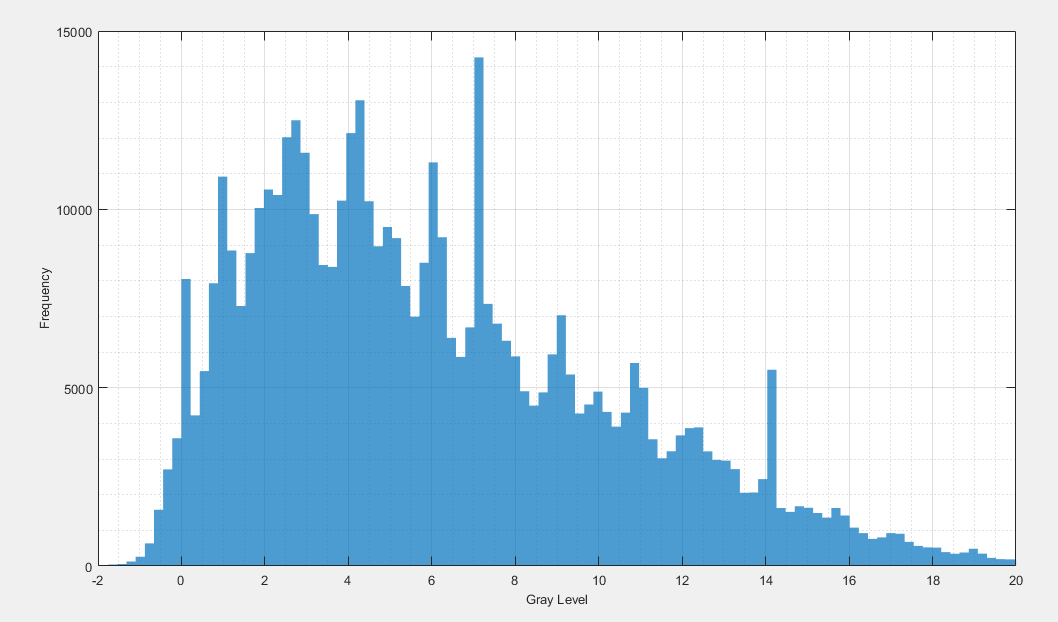
以上为相机A像素输出分布图
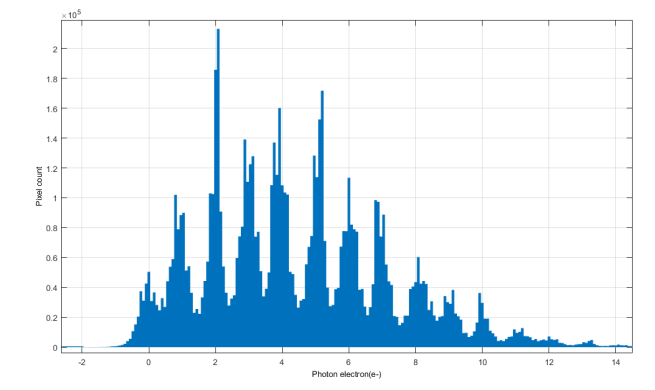
以上为Solis B518:像素输出分布图
应用前景及意义
深视智能Solis B518将读出噪声压至0.31e⁻的超低水平,同时拥有18μm大像元,能够稳定实现光子数解析与单光子级弱光探测。它能精准捕捉超分辨成像中的单分子荧光信号、量子光学实验的光子计数,还可替代EMCCD规避其固有缺陷。

深视智能Solis B518科学相机的弱光成像方案,成功突破前沿科研的弱光探测技术瓶颈,为单分子研究、量子测量等高精尖领域筑牢数据根基,助力实验精度与数据可靠性实现质的跃升。