机器学习-从入门到入土 生成式模型
个人导航
知乎:https://www.zhihu.com/people/byzh_rc
CSDN:https://blog.csdn.net/qq_54636039
注:本文仅对所述内容做了框架性引导,具体细节可查询其余相关资料or源码
参考文章:各方资料
文章目录
- [机器学习-从入门到入土 生成式模型](#[机器学习-从入门到入土] 生成式模型)
- 个人导航
- [生成式模型 generative model](#生成式模型 generative model)
- 概率PCA(PPCA)
-
-
-
- 1.模型定义
- [2.生成过程(2维数据空间 + 1维隐空间)](#2.生成过程(2维数据空间 + 1维隐空间))
- 3.极大似然参数估计
- 4.矩阵求逆与后验分布
-
-
- [自回归模型 AR](#自回归模型 AR)
- [变分自动编码器 VAE](#变分自动编码器 VAE)
- [生成对抗网络 GAN](#生成对抗网络 GAN)
- [扩散模型 diffusion model](#扩散模型 diffusion model)
- 总结
生成式模型 generative model
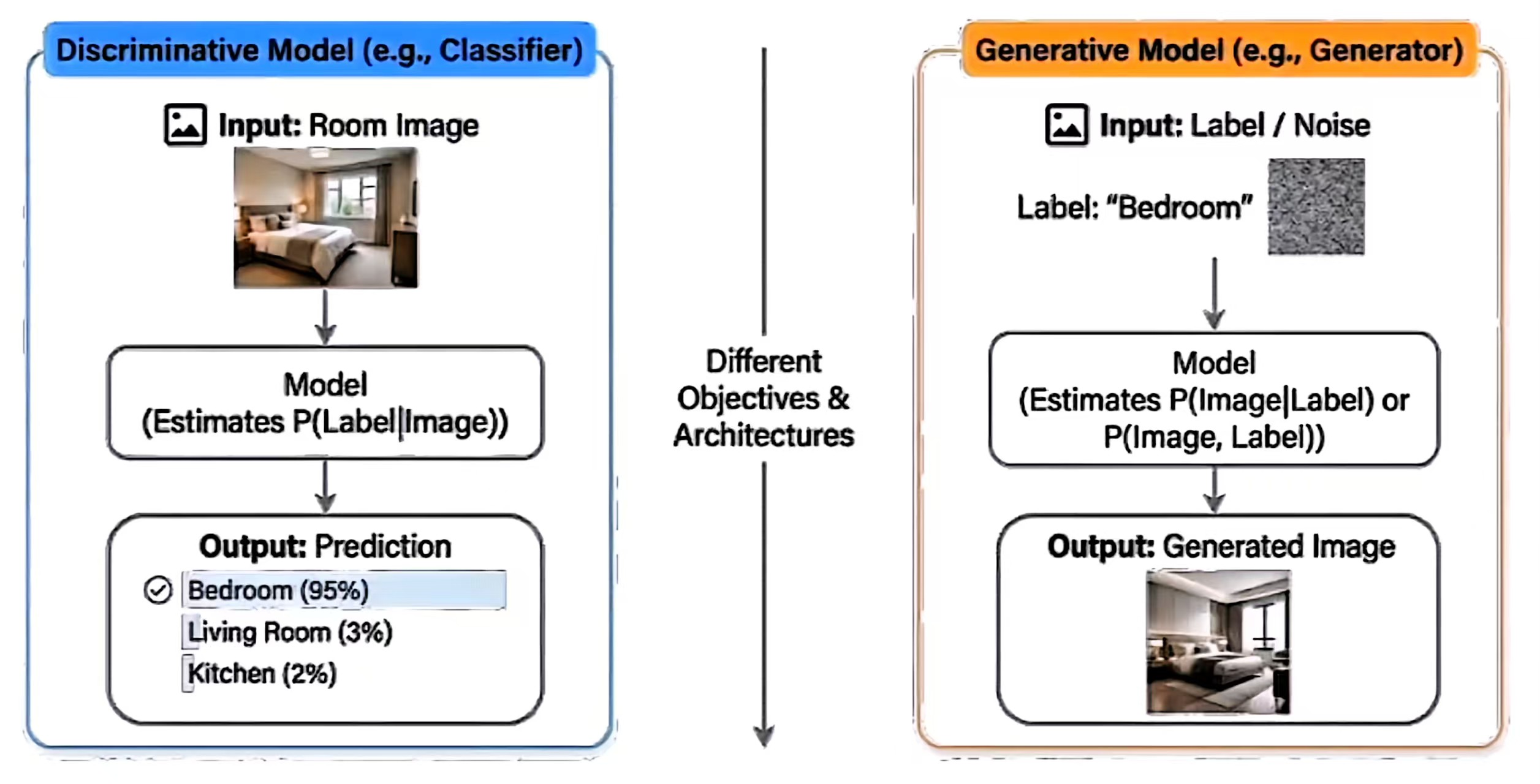
以往: 判别式模型discriminative model
- 学习后验概率 P ( Y ∣ X ) P(Y|X) P(Y∣X)
- 核心目标:找到不同类别之间的决策边界
- 示例:将一张图片分类为 "猫" 或 "狗"
当前介绍: 生成式模型generative model
-
学习联合概率 P ( X , Y ) P(X,Y) P(X,Y) 或数据分布 P ( X ) P(X) P(X)
联合概率 P ( X , Y ) P(X,Y) P(X,Y): 数据和标签是如何一起出现的
数据分布 P ( X ) P(X) P(X): 数据本身是如何分布的
-
核心目标:理解数据是如何生成的
-
核心洞见:如果你能生成数据,就意味着你理解了它的结构
需要生成式模型的原因:
- 采样 / 内容合成:生成逼真的图像、音频、文本
- 密度估计 / 异常检测:评估某个样本的出现概率
- 补全与逆问题:填补缺失数据、解决逆任务
- 半监督 / 自监督学习:利用 P ( X ) P(X) P(X) 来利用无标签数据
概率PCA(PPCA)
学习了数据的概率分布 p ( x ) p(\boldsymbol{x}) p(x)
1.模型定义
- 首先,引入显式隐变量 \\boldsymbol{z} ,对应主成分子空间
- 为隐变量定义高斯先验分布 p ( z ) p(\boldsymbol{z}) p(z):
p ( z ) = N ( z ∣ 0 , I ) p(\boldsymbol{z}) = \mathcal{N}(\boldsymbol{z} \mid \boldsymbol{0}, \boldsymbol{I}) p(z)=N(z∣0,I) - 为观测变量 \\boldsymbol{x} 定义基于隐变量的高斯条件分布 p ( x ∣ z ) p(\boldsymbol{x} \mid \boldsymbol{z}) p(x∣z):
p ( x ∣ z ) = N ( x ∣ W z + μ , σ 2 I ) p(\boldsymbol{x} \mid \boldsymbol{z}) = \mathcal{N}(\boldsymbol{x} \mid \boldsymbol{Wz} + \boldsymbol{\mu}, \sigma^2 \boldsymbol{I}) p(x∣z)=N(x∣Wz+μ,σ2I) - 生成视角理解:
x = W z + μ + ϵ \boldsymbol{x} = \boldsymbol{Wz} + \boldsymbol{\mu} + \boldsymbol{\epsilon} x=Wz+μ+ϵ
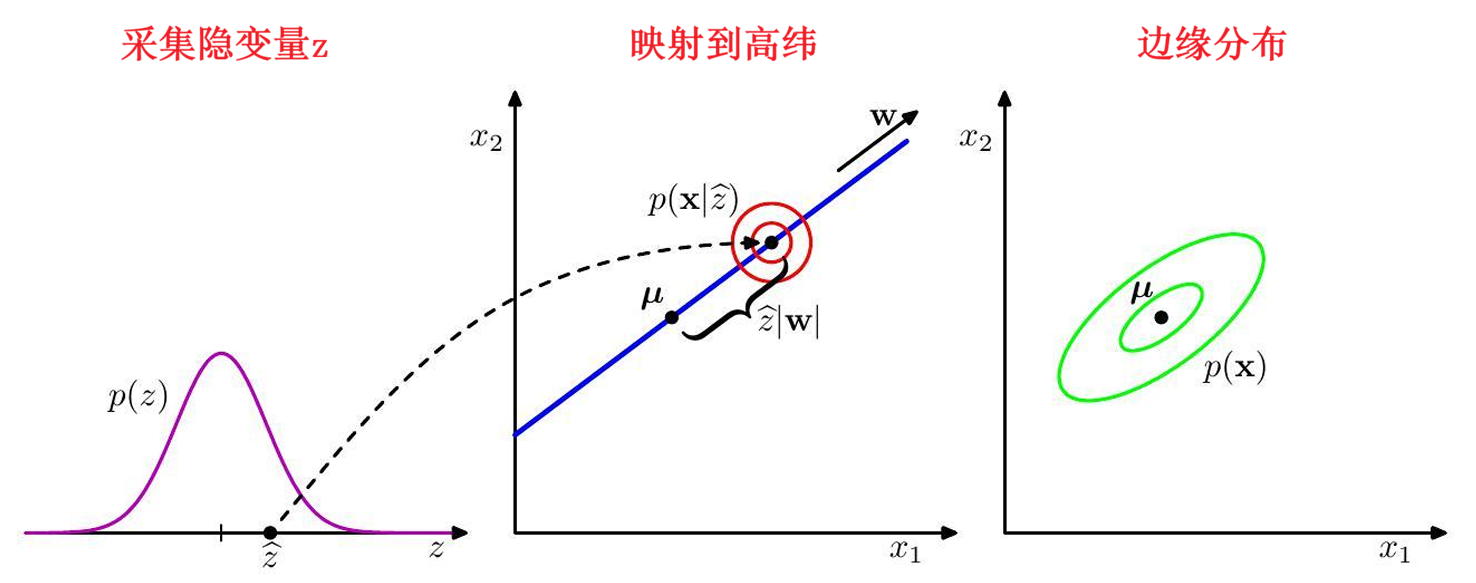
2.生成过程(2维数据空间 + 1维隐空间)
概率主成分分析的生成逻辑:
- 从隐变量先验分布 p ( z ^ ) p(\hat{\boldsymbol{z}}) p(z^) 抽取隐变量取值 z ^ \hat{\boldsymbol{z}} z^
- 从各向同性的高斯分布 (红色圆圈示意)中抽取观测数据点 x \boldsymbol{x} x,该分布的:
- 均值: w z ^ + μ \boldsymbol{w}\hat{\boldsymbol{z}} + \boldsymbol{\mu} wz^+μ
- 协方差: σ 2 I \sigma^2 \boldsymbol{I} σ2I
绿色椭圆代表边缘分布 p ( x ) p(\boldsymbol{x}) p(x) 的密度等高线
3.极大似然参数估计
通过极大似然法确定参数 W 、 μ 、 σ 2 \boldsymbol{W}、\boldsymbol{\mu}、\sigma^2 W、μ、σ2,需先得到边缘分布 p ( x ) p(\boldsymbol{x}) p(x):
p ( x ) = ∫ p ( x ∣ z ) p ( z ) d z = N ( x ∣ μ , C ) p(\boldsymbol{x}) = \int p(\boldsymbol{x} \mid \boldsymbol{z}) p(\boldsymbol{z}) d\boldsymbol{z} = \mathcal{N}(\boldsymbol{x} \mid \boldsymbol{\mu}, \boldsymbol{C}) p(x)=∫p(x∣z)p(z)dz=N(x∣μ,C)
其中 d × d d \times d d×d 维协方差矩阵 C \boldsymbol{C} C 定义为:
C = W W T + σ 2 I \boldsymbol{C} = \boldsymbol{WW}^T + \sigma^2 \boldsymbol{I} C=WWT+σ2I
4.矩阵求逆与后验分布
计算预测分布时需用到 C − 1 \boldsymbol{C}^{-1} C−1,利用矩阵求逆恒等式 可得:
C − 1 = σ − 2 I − σ − 2 W M − 1 W T \boldsymbol{C}^{-1} = \sigma^{-2}\boldsymbol{I} - \sigma^{-2}\boldsymbol{WM}^{-1}\boldsymbol{W}^T C−1=σ−2I−σ−2WM−1WT
其中 d ′ × d ′ d' \times d' d′×d′ 维矩阵 M \boldsymbol{M} M 定义为:
M = W T W + σ 2 I \boldsymbol{M} = \boldsymbol{W}^T\boldsymbol{W} + \sigma^2\boldsymbol{I} M=WTW+σ2I
后验分布 p ( z ∣ x ) p(\boldsymbol{z} \mid \boldsymbol{x}) p(z∣x) 的表达式为:
p ( z ∣ x ) = N ( z ∣ M − 1 W T ( x − μ ) , σ − 2 M ) p(\boldsymbol{z} \mid \boldsymbol{x}) = \mathcal{N}\left(\boldsymbol{z} \mid \boldsymbol{M}^{-1}\boldsymbol{W}^T(\boldsymbol{x} - \boldsymbol{\mu}), \sigma^{-2}\boldsymbol{M}\right) p(z∣x)=N(z∣M−1WT(x−μ),σ−2M)
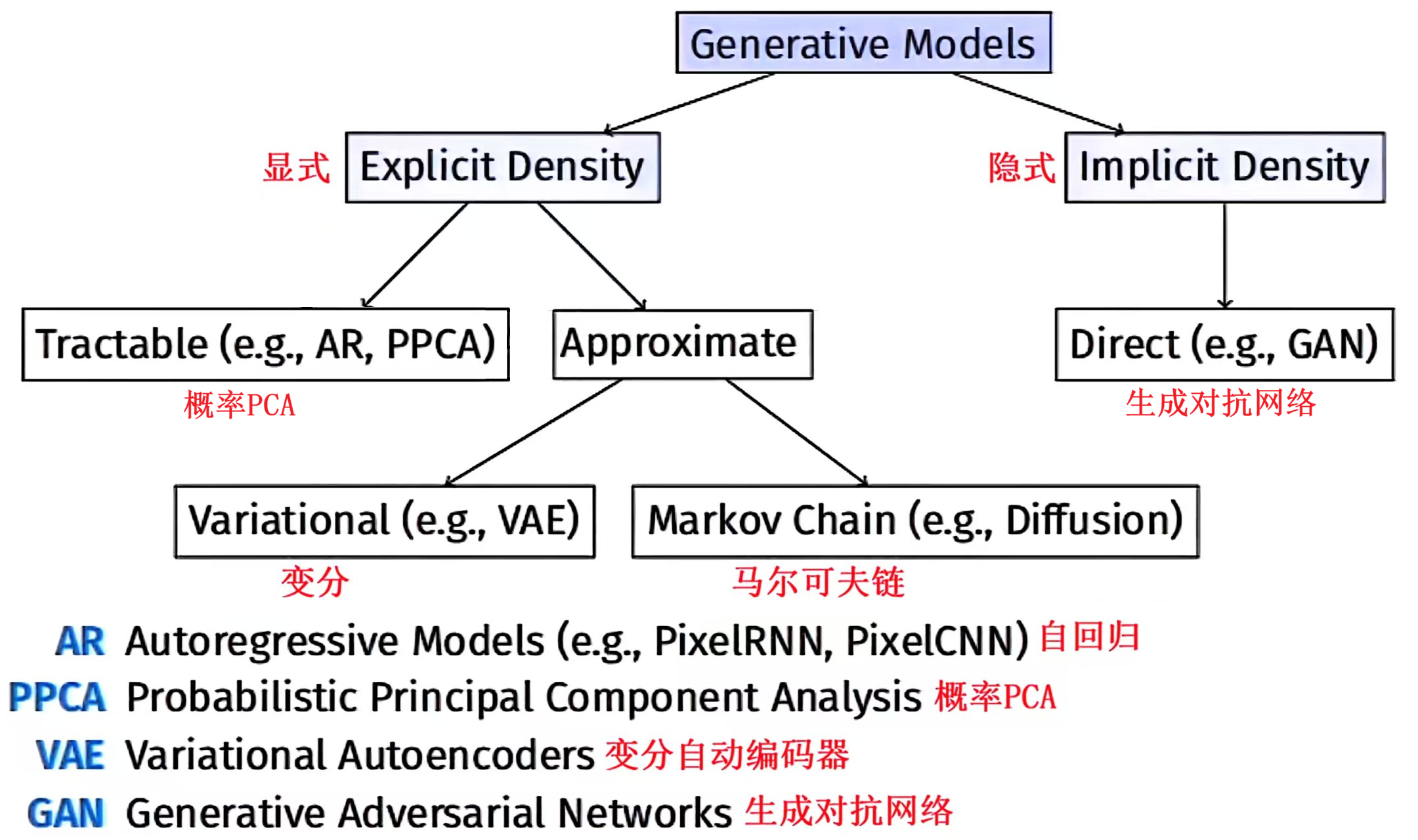
自回归模型 AR
学习了数据的概率分布 p ( x ) p(\boldsymbol{x}) p(x)
AR: Auto-Regressive
- regressive:用已知变量预测未知变量
- auto:预测变量来自"自身序列"
自回归模型不是一种具体网络,而是一种"联合分布建模方式":用过去变量去预测下一个变量
1.核心原理
利用概率链式法则分解联合分布:
p ( x ) = ∏ i = 1 n p ( x i ∣ x 1 , ... , x i − 1 ) p(x) = \prod_{i=1}^{n} p(x_i|x_1,\dots,x_{i-1}) p(x)=i=1∏np(xi∣x1,...,xi−1)
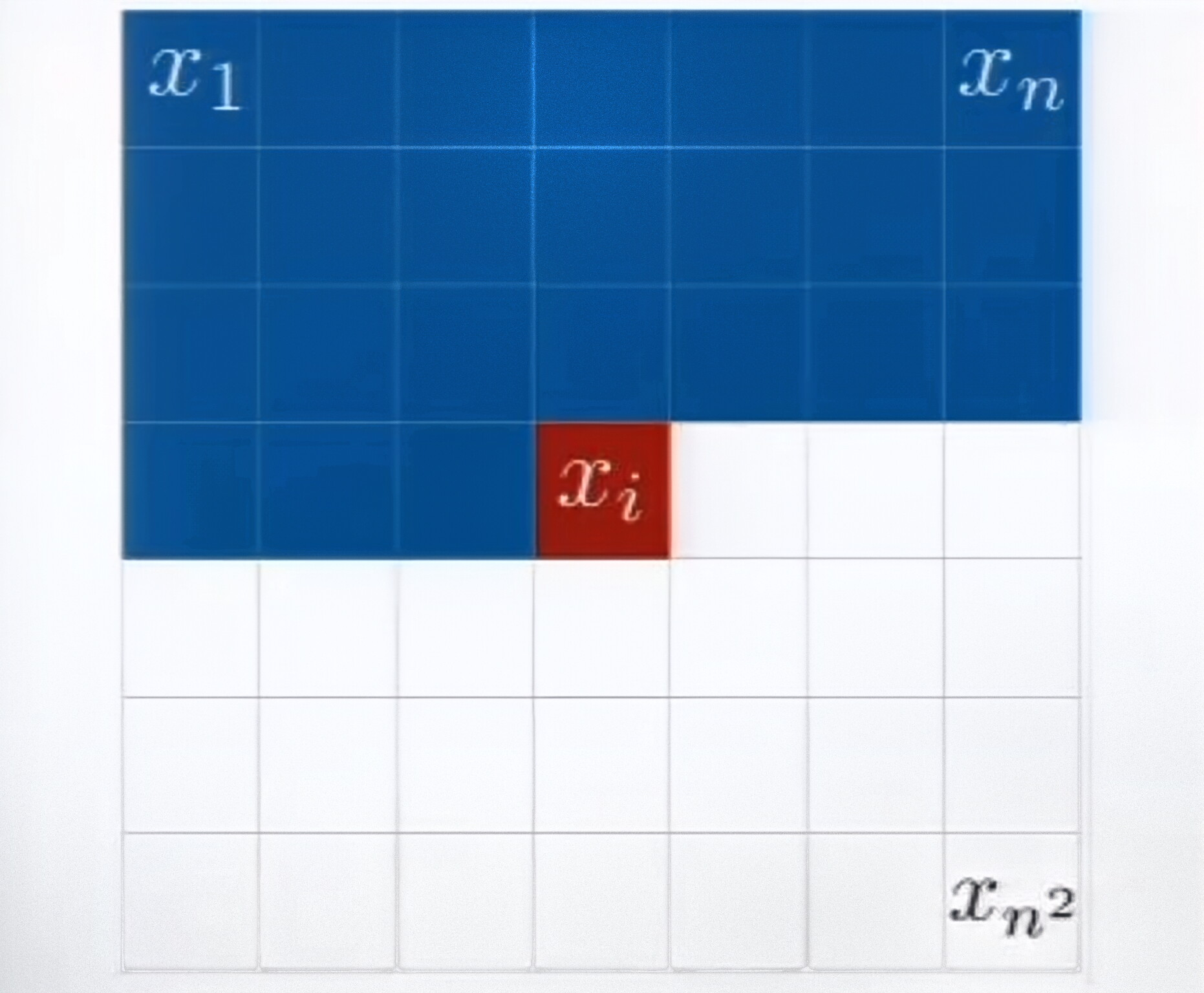
2.架构
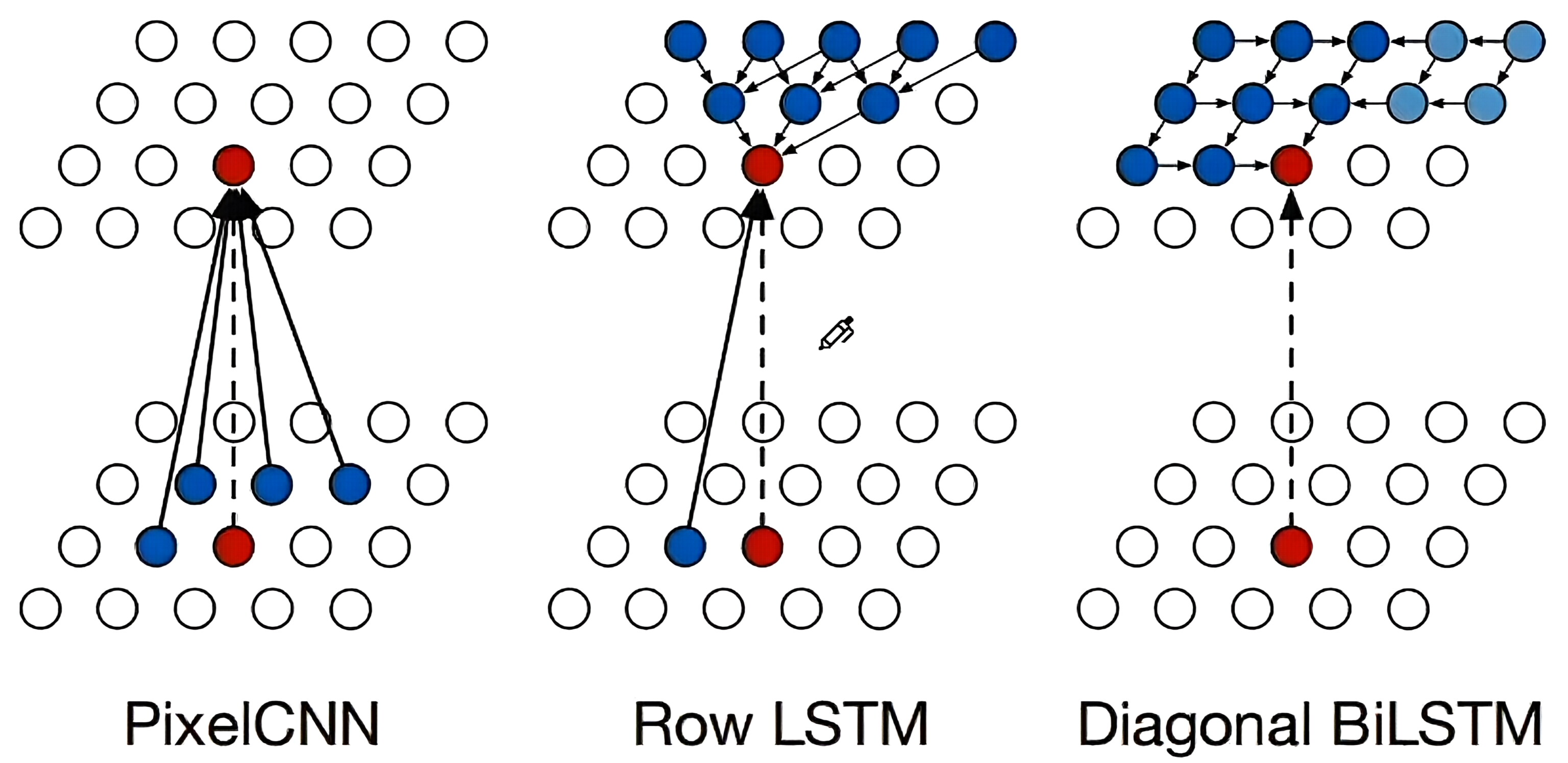
因果性约束: 第 i i i 个输出只能依赖 x 1 , ... , x i − 1 x_1,\dots,x_{i-1} x1,...,xi−1,不能看到未来
- 循环神经网络(RNN):适用于序列数据(文本、音频)
- PixelRNN / PixelCNN:用于图像生成(逐像素生成)
优点:可进行精确的似然计算(易于处理),训练难度低
缺点:序列生成的计算速度较慢
变分自动编码器 VAE
学习了数据的概率分布 p ( x ) p(\boldsymbol{x}) p(x)
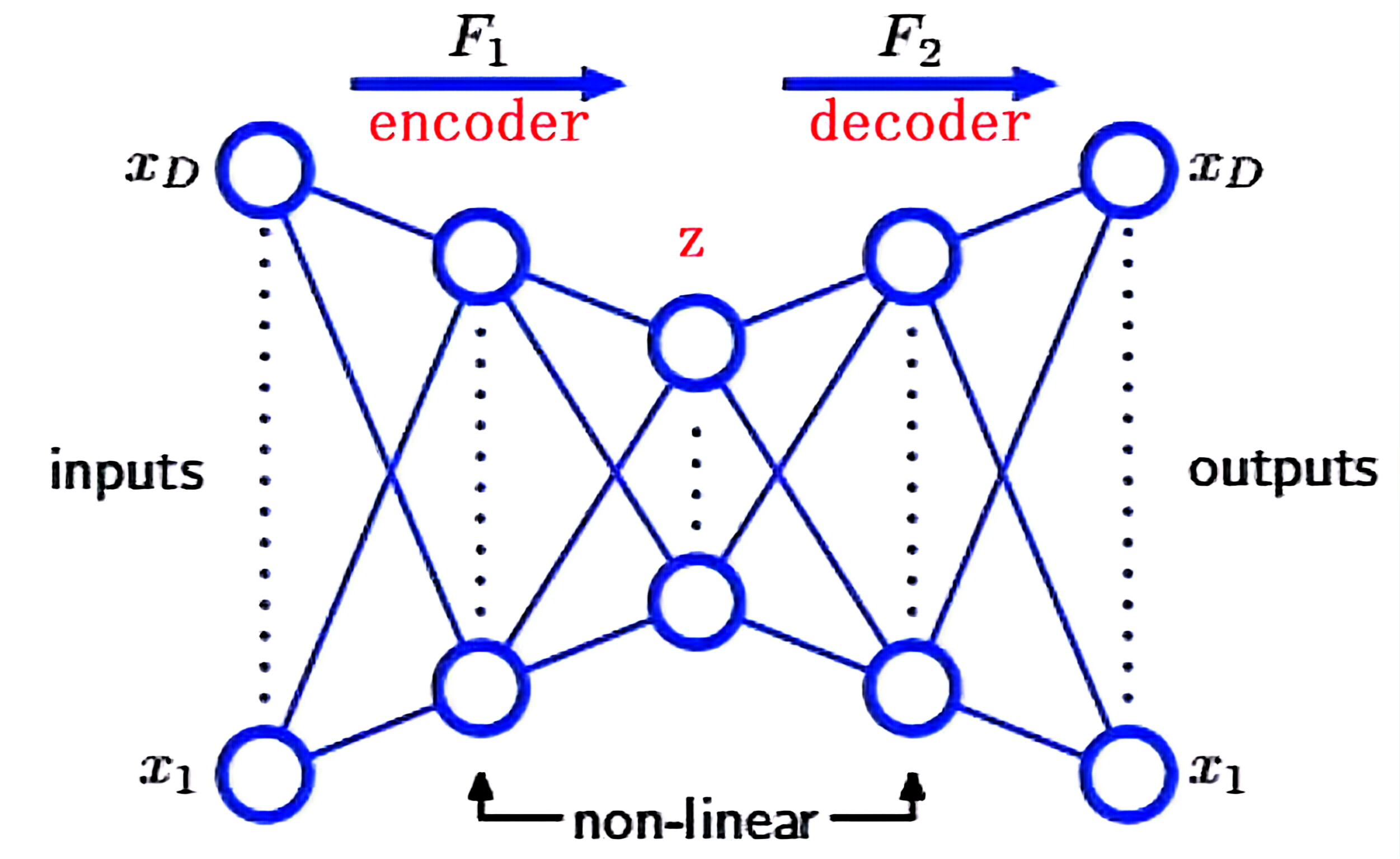
增加额外的非线性单元隐藏层,可得到能执行非线性降维的自联想网络
- 引入潜在变量z,用于捕捉变化因子(如姿态、光线等)
- 编码器 q ϕ ( z ∣ x ) q_\phi(z|x) qϕ(z∣x):将输入映射到潜在空间
- 解码器 p θ ( x ∣ z ) p_\theta(x|z) pθ(x∣z):从潜在变量中重构输入
目标:证据下界(ELBO)
log p ( x ) ≥ E q ϕ ( z ∣ x ) log p θ ( x ∣ z ) ⏟ 重构损失 − D KL ( q ϕ ( z ∣ x ) ∥ p ( z ) ) ⏟ 正则化项 \log p(x) \geq \underbrace{\mathbb{E}{q\phi(z|x)} \left \\log p_\\theta(x\|z) \\right}{\text{重构损失}} - \underbrace{D{\text{KL}} \left( q_\phi(z|x) \parallel p(z) \right)}_{\text{正则化项}} logp(x)≥重构损失 Eqϕ(z∣x)logpθ(x∣z)−正则化项 DKL(qϕ(z∣x)∥p(z))
生成对抗网络 GAN
学习了数据的概率分布 p ( x ) p(\boldsymbol{x}) p(x)
GAN: generative adversarial network
两个神经网络相互对抗:
| 生成器(G) | 判别器(D) |
|---|---|
| 尝试生成逼真的假数据,以此欺骗判别器(输入z → 输出 G ( z ) G(z) G(z)) | 尝试区分真实数据 x x x和假数据 G ( z ) G(z) G(z) |
让生成器的分布 p g p_g pg 在对抗过程中逼近真实数据分布 p data p_{\text{data}} pdata
生成器与判别器通过如下价值函数 V ( G , D ) V(G,D) V(G,D) 进行极小极大博弈:
min G max D V ( G , D ) = E x ∼ p data log D ( x ) + E z ∼ p z log ( 1 − D ( G ( z ) ) ) \min_{G} \max_{D} V(G,D) = \mathbb{E}{x \sim p{\text{data}}} \left \\log D(x) \\right + \mathbb{E}{z \sim p{z}} \left \\log(1-D(G(z))) \\right GminDmaxV(G,D)=Ex∼pdatalogD(x)+Ez∼pzlog(1−D(G(z)))
- 优势:能生成非常清晰、高质量的图像
- 劣势:训练不稳定(难以找到纳什均衡);存在模式崩溃问题;没有显式的似然密度
扩散模型 diffusion model
学习了数据的概率分布 p ( x ) p(\boldsymbol{x}) p(x)
扩散模型通过一个固定的"加噪马尔可夫过程"把真实数据逐步推向已知噪声分布,再学习其逆过程(逐步去噪),从而实现从噪声到数据的生成
正向过程(固定的) :逐步向数据中添加高斯噪声,直到数据变成纯噪声( x T x_T xT)
x 0 ⟶ 噪声 x 1 ... ⟶ 噪声 x T x_0 \stackrel{\text{噪声}}{\longrightarrow} x_1 \dots \stackrel{\text{噪声}}{\longrightarrow} x_T x0⟶噪声x1...⟶噪声xT
反向过程(可学习的) :训练一个神经网络,对图像进行逐序去噪
x T ⟶ 去噪 x T − 1 ... ⟶ 去噪 x 0 x_T \stackrel{\text{去噪}}{\longrightarrow} x_{T-1} \dots \stackrel{\text{去噪}}{\longrightarrow} x_0 xT⟶去噪xT−1...⟶去噪x0
优势:与GAN相比,样本质量更高,训练更稳定
可用于:
- 局部缺失
- 遮挡修复
- 老照片修复
总结
| 模型 | 类型 | 优势 | 劣势 |
|---|---|---|---|
| 自回归模型AR | 显式(易处理) | 精确似然 | 采样速度慢 |
| 变分自动编码器VAE | 显式(近似) | 采样快、潜空间平滑 | 样本模糊 |
| 生成对抗网络GAN | 隐式 | 样本清晰 | 训练不稳定 |
| 扩散模型diffusion | 显式(近似) | 质量高、训练稳定 | 采样慢(迭代式) |