技术栈
基于UE5开发的pico大空间项目开发之虚拟坐标系与真实坐标系的对应关系
碎梦人
2026-01-10 10:33
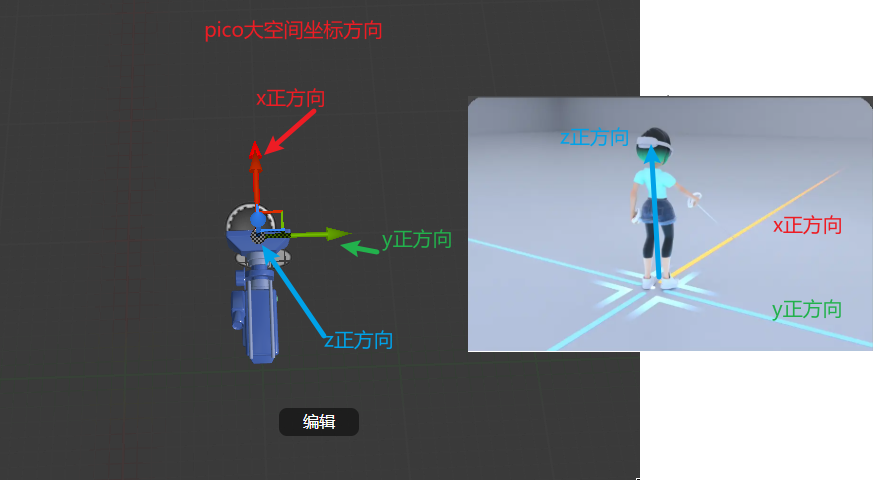
只需要保证虚拟场景中的摄像机正方向和pico大空间中的正方向一致,就能对齐虚拟与现实的坐标系方向,保证相机位置和大空间原点位置重合就能保证两个坐标系位置重合;
ue5
lbe
大空间坐标系对应关系
上一篇:
算法调度:场景分析、策略与工程化技术难点——无人机全量感知 vs 机器人定点路由
下一篇:
什么是functioncall,mcp,skills?一文作简单解析(随手记)
相关推荐
清泓y
18 小时前
UE5--VR与AR开发技术
ue5
·
ar
·
vr
日月云棠
18 小时前
UE5 Lyra Messages 模块深度解析——从一条击杀消息看游戏事件系统的设计哲学
游戏
·
ue5
日月云棠
2 天前
UE5 Lyra Input 模块:从手柄摇杆到技能释放,一条链路如何做到零耦合
ue5
日月云棠
5 天前
UE5 Lyra源码分析——Audio_Analysis音频模块全面分析
ue5
·
音视频
成都渲染101云渲染6666
5 天前
2026云渲染平台哪个好?建筑、动画、UE5项目选择云渲染的3个关键标准
ue5
清泓y
6 天前
UE 物理系统知识分享
面试
·
ue5
·
游戏程序
清泓y
6 天前
UE移动开发技术面试题
android
·
面试
·
ue5
·
ue4
·
游戏程序
清泓y
6 天前
UE基础知识与引擎架构面试题
面试
·
架构
·
ue5
·
ue4
·
游戏程序
mengzhi啊
8 天前
UE5关卡切换 传统加载(阻塞)vs流式加载(非阻塞)。还有加载关卡3种办法
ue5
电子云与长程纠缠
8 天前
UE中使用TGuardValue与TInlineComponentArray数据结构
开发语言
·
数据结构
·
学习
·
ue5
·
游戏引擎
热门推荐
01
如何新建文件夹? 电脑新建文件夹的4种方法
02
GitHub 镜像站点
03
国内可直接用、免费额度/永久免费的大模型API清单(含 SiliconFlow、火山、阿里、智谱、百度、Kimi、DeepSeek、DMXAPI 等)
04
2026年7月AI圈大地震:GPT-5.6被政府限制、Claude入驻Slack、Anthropic自研芯片
05
微信历史版本含下载地址( Windows PC | 安卓 | MAC )及设置微信不更新
06
AI 编程 IDE 全景解析 2026:Agent 全面接管开发链路
07
2026 国产 AI 大模型横评:DeepSeek、通义千问、Kimi、文心一言、星火、豆包谁更能打?
08
AI科技热点日报 | 2026年07月01日
09
Agnes AI 免费 API 接入指南:文本、生图、生视频,一套接口全免费
10
2026 年 AI 大模型 & AI 编程工具实战全总结