一、将SW模型输出为STL格式

二、下载软件CloudCompare

 安装完成
安装完成
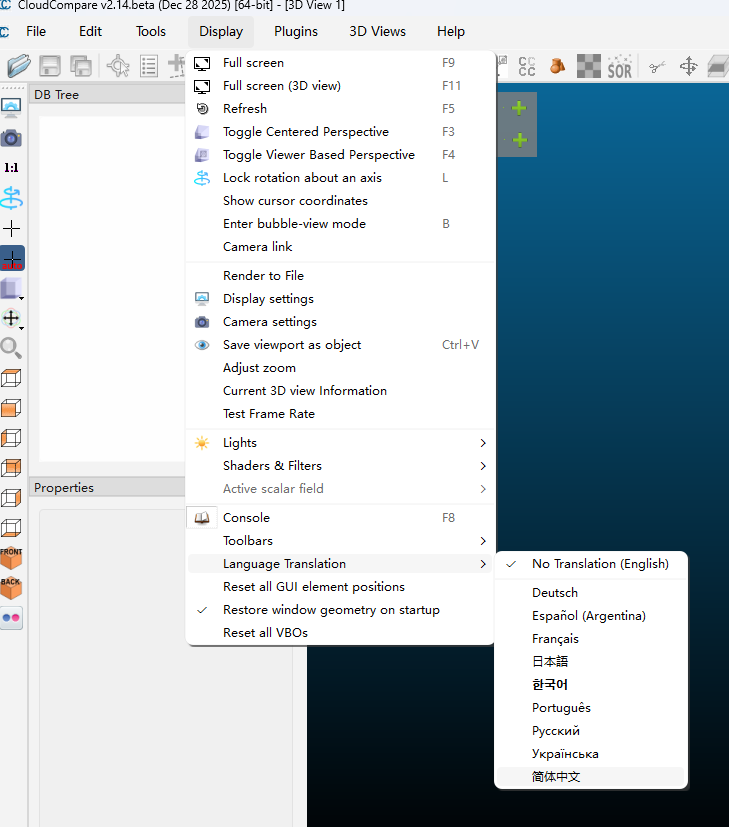
打开软件重置中文简体,重启生效
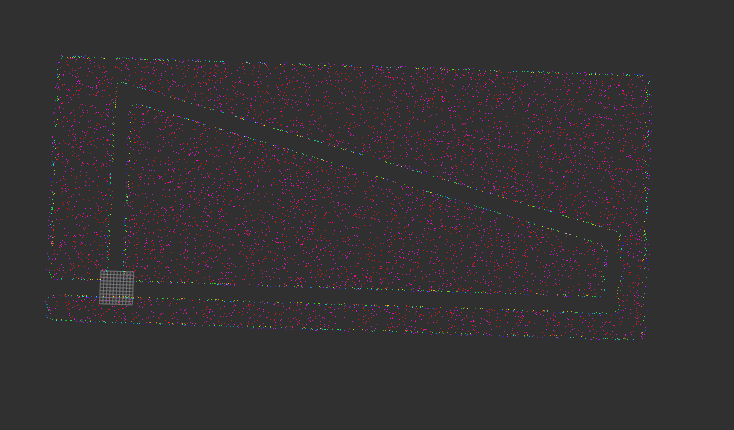
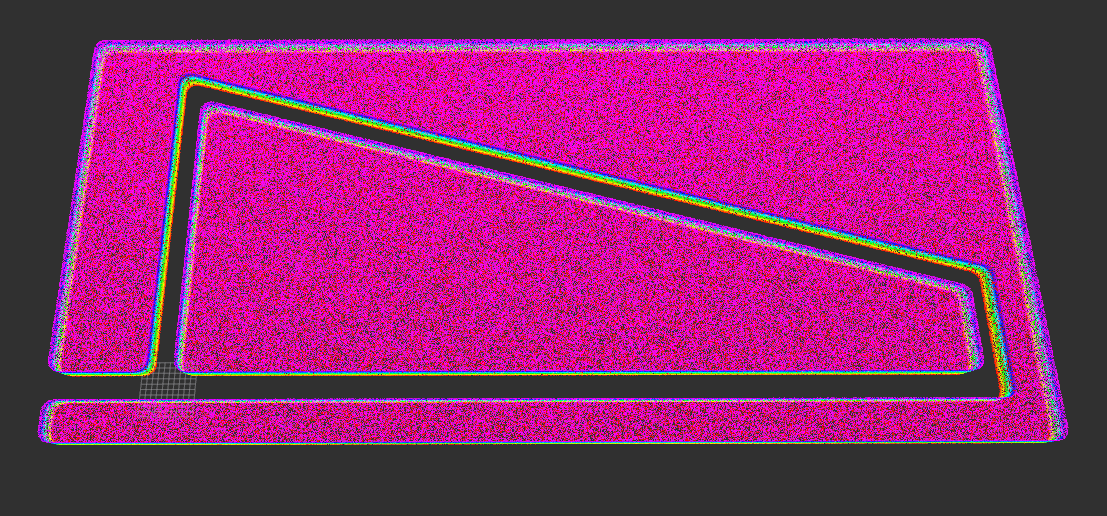
三、点云生成
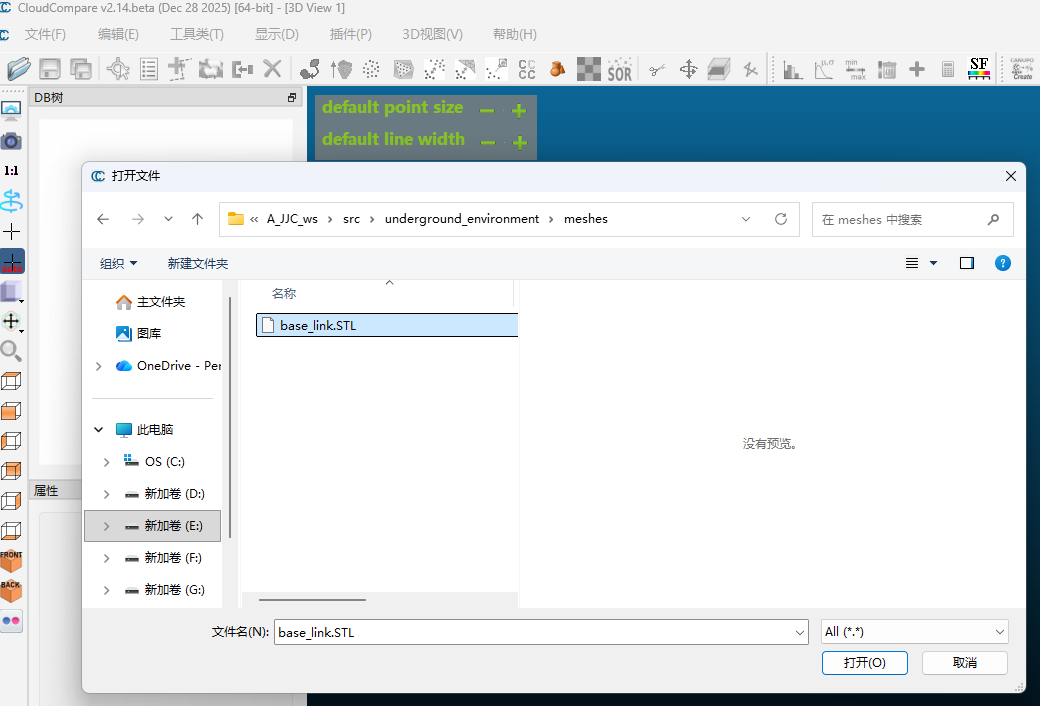
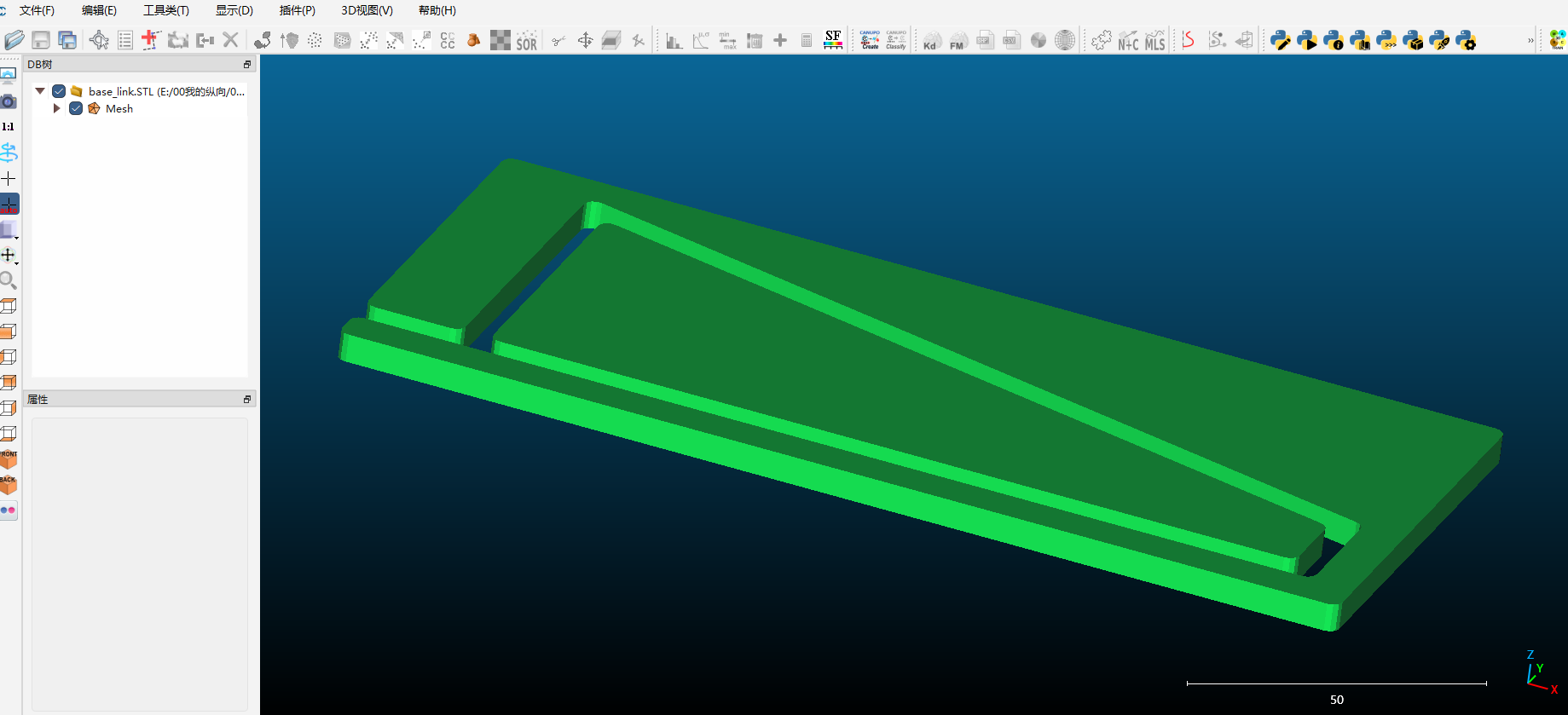
3.1加载STL文件
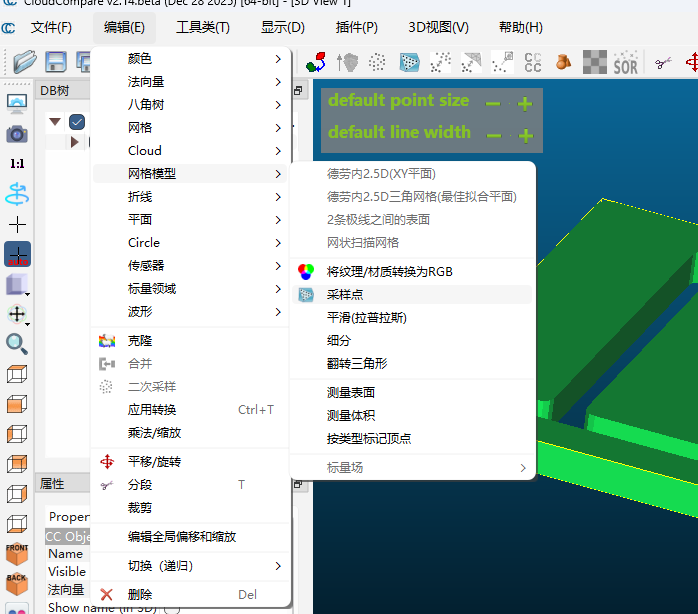
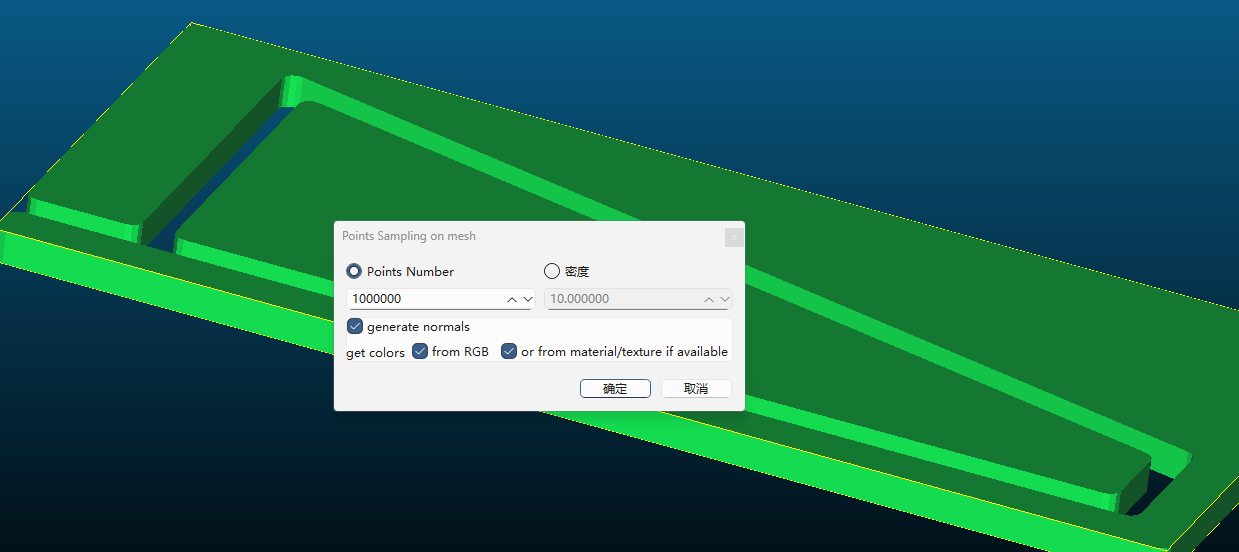
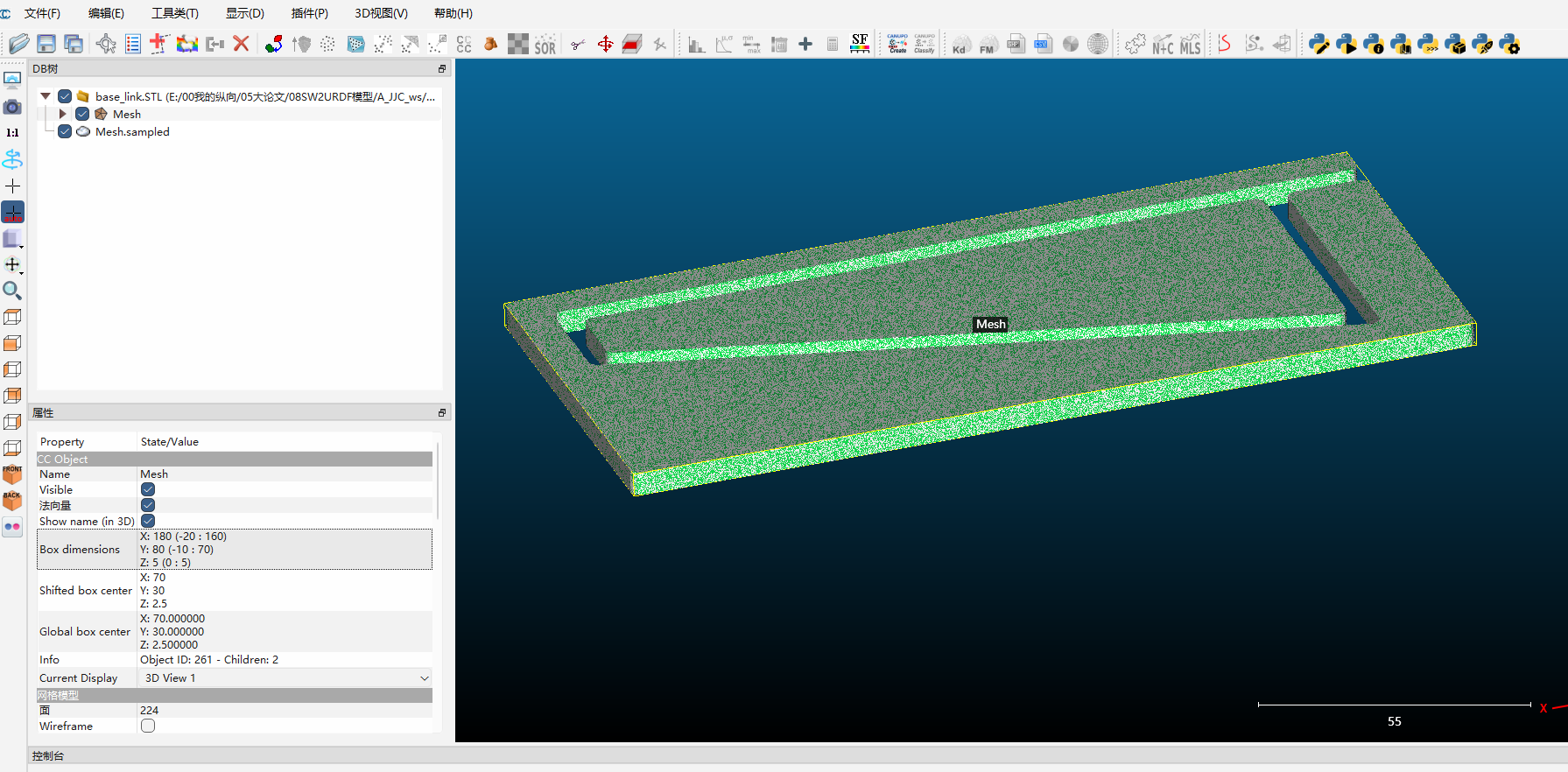
3.2选中模型创建点云
可以选择点云量参数
可以看到全局点云坐标范围,以SW模型原点为参考坐标
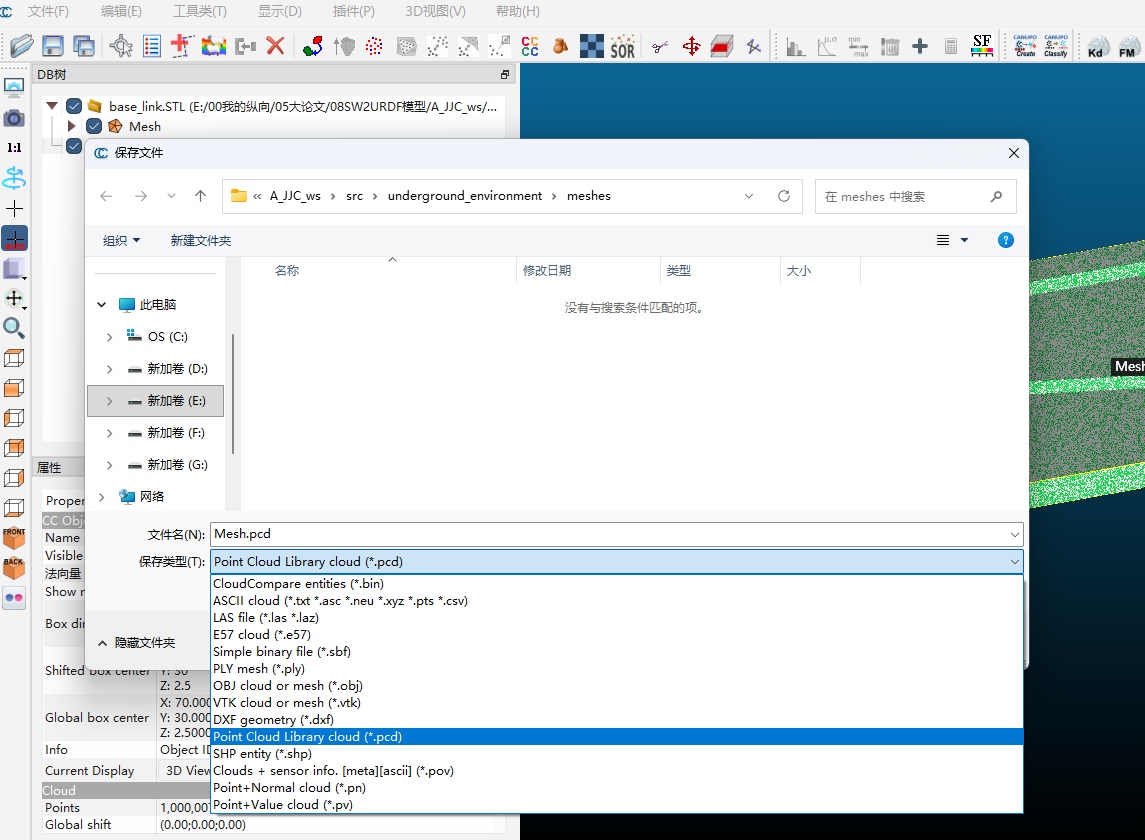
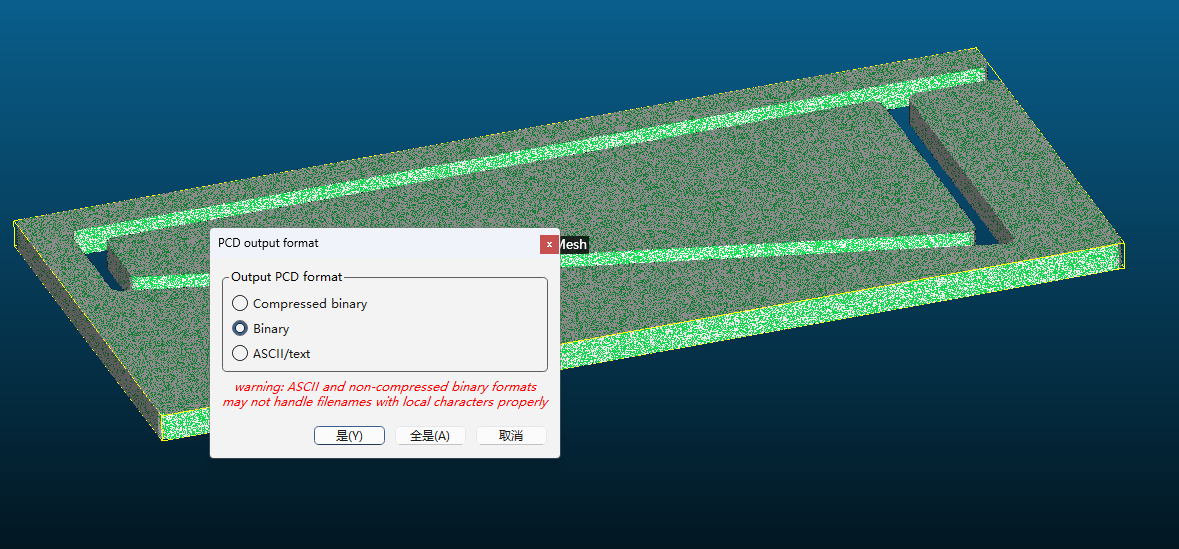
3.3保存PCD格式
选择PCD格式
选择binary格式,精度高,文件小,效率高
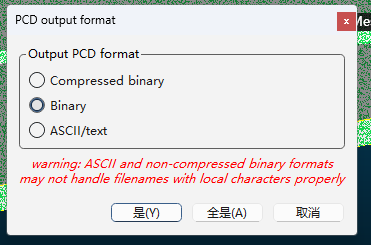
此处需要在纯英文路径下,选择全是
四、ROS联动
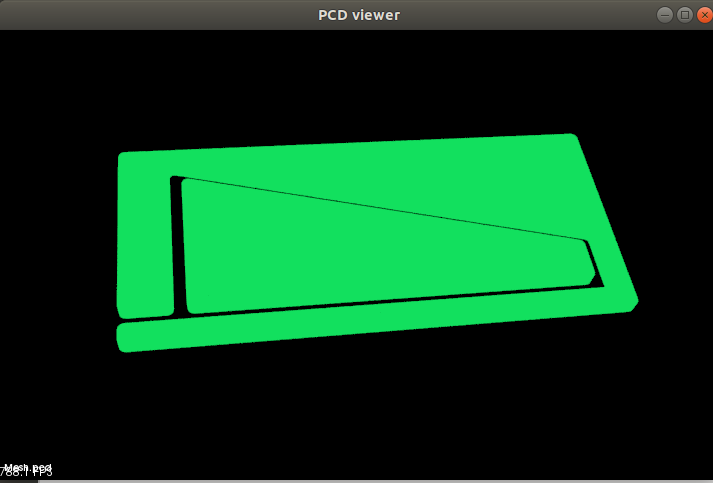
4.1使用PCL打开文件
4.2使用RVIZ打开点云
rosrun pcl_ros pcd_to_pointcloud xx.pcd _frame_id:=map _rate:=1.0 _latch:=true