常用的mqtt协议就是一个订阅发布的协议,在机器人的世界里为了能感知环境信息和进行动作,装了很多感应器和执行器。常见的感应器有摄像头,雷达,执行器有机械臂关节的舵机,电机,夹爪。为了能让他们进行相互之间进行一个通讯和信息传递,ros2引入了一套叫订阅和发布的一套机制,就是话题通讯。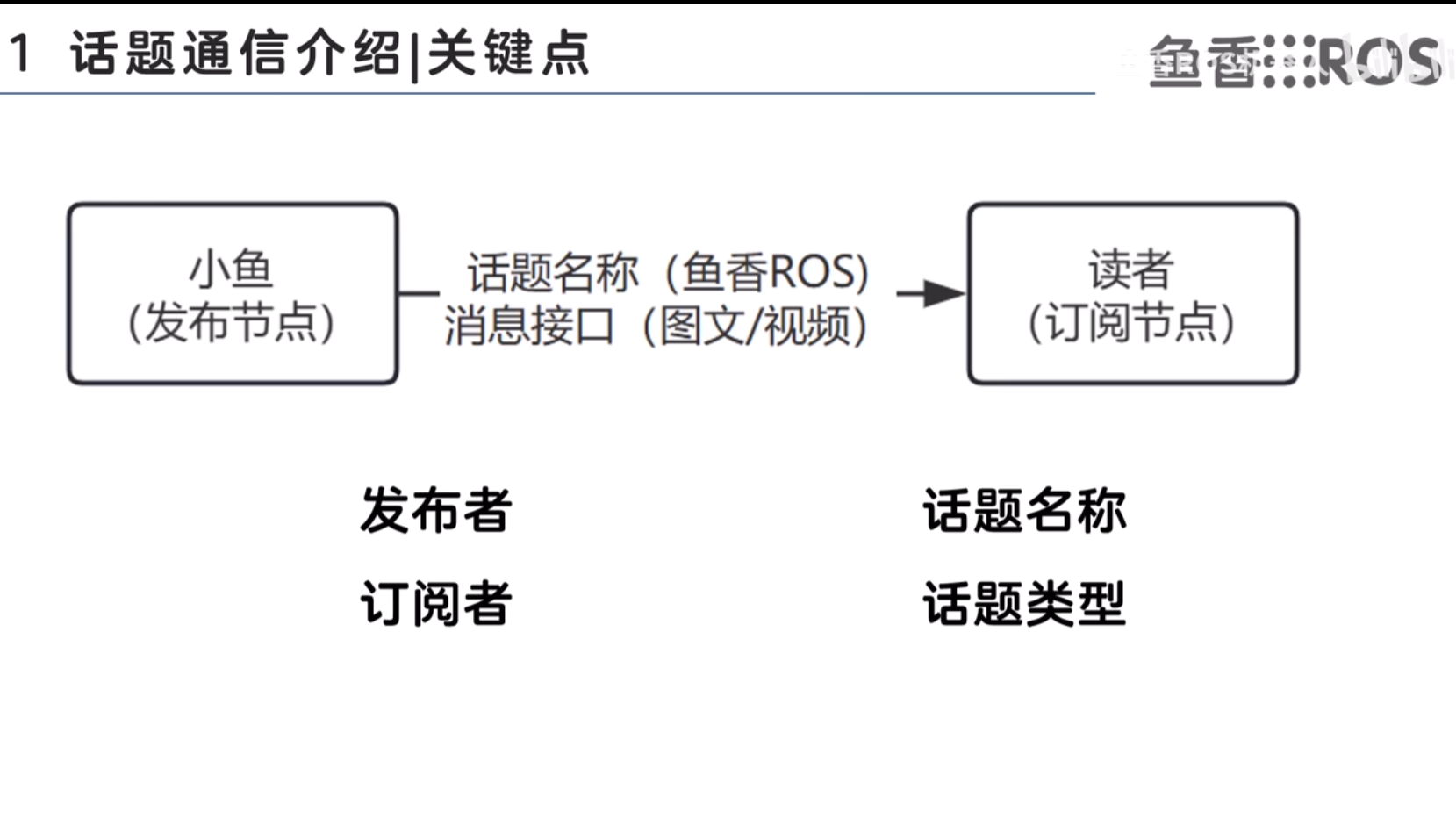
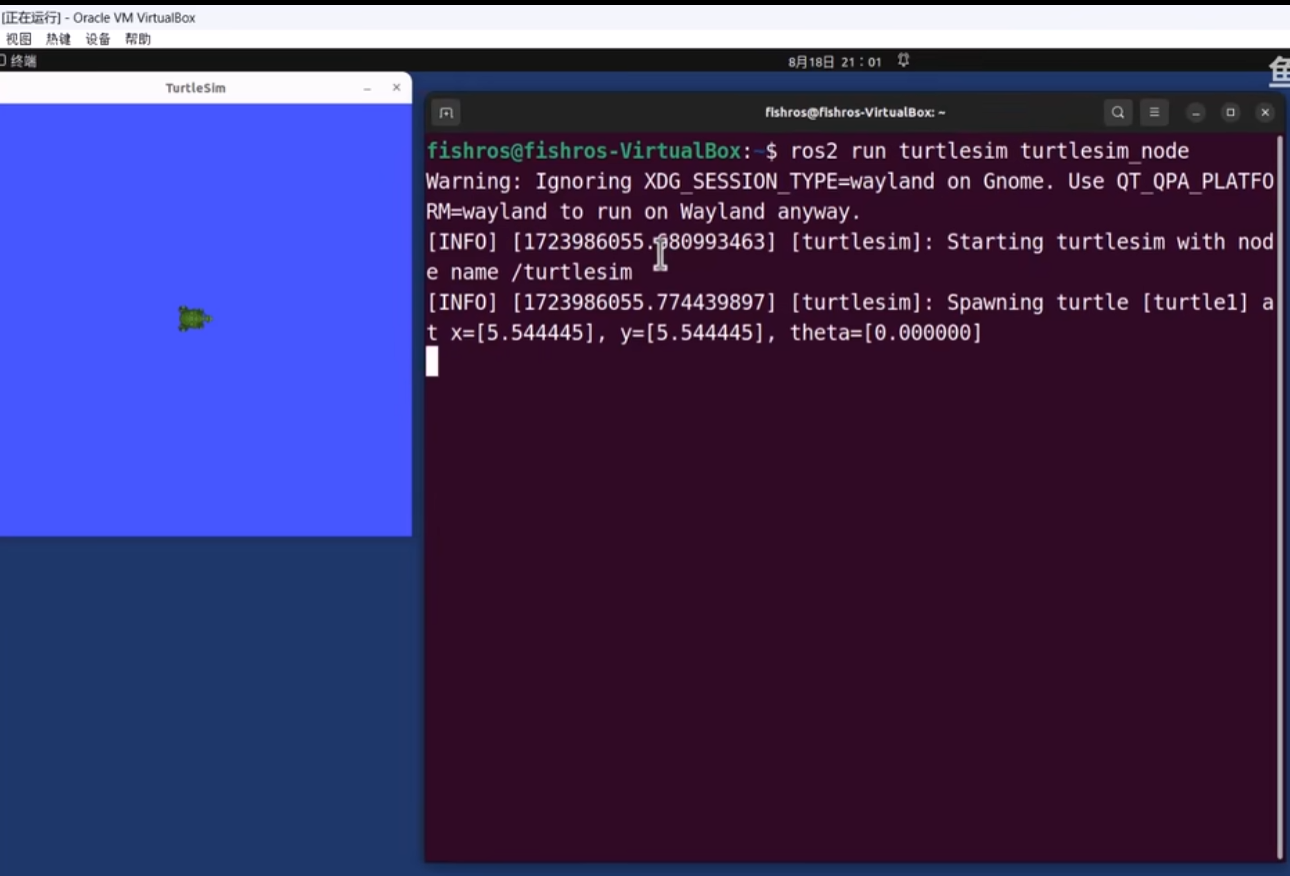 运行小海龟
运行小海龟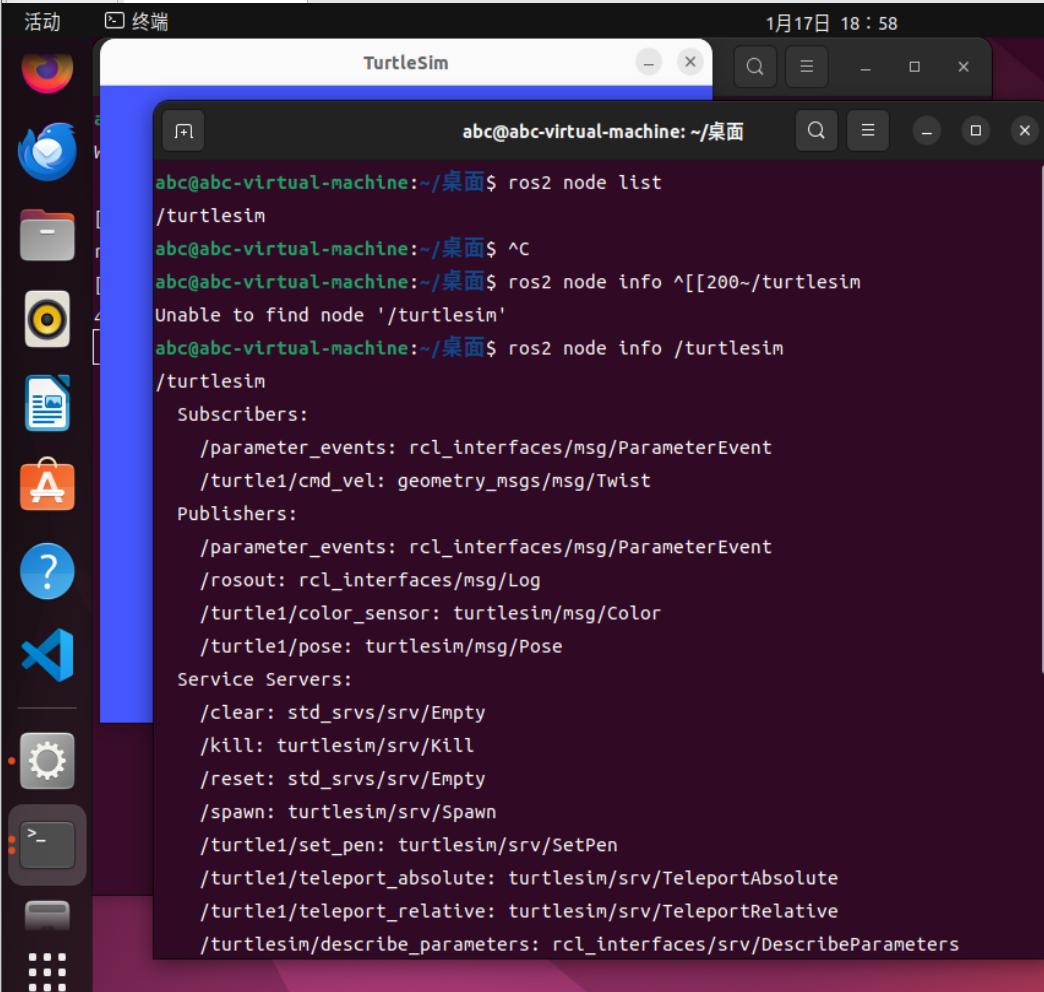 另外开一个终端,可以打印出这个节点的相关信息
另外开一个终端,可以打印出这个节点的相关信息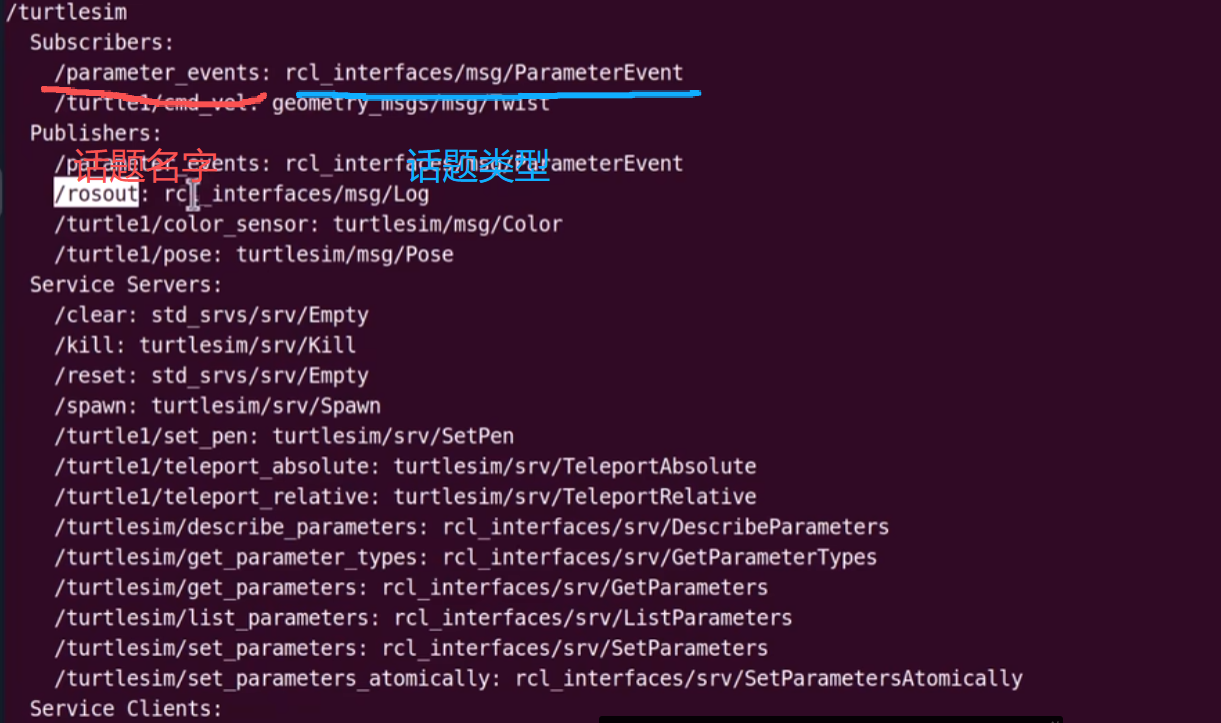
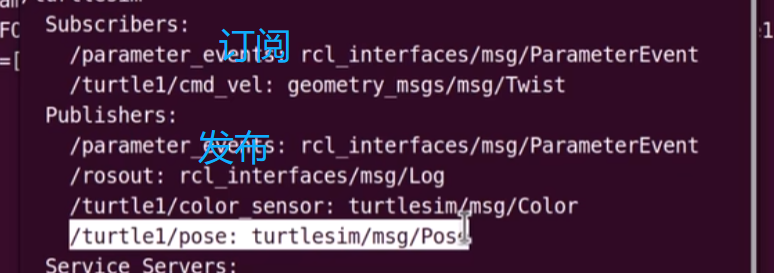

这个其实就是发布小海龟的实时信息
假如我们只知道话题的名字,比如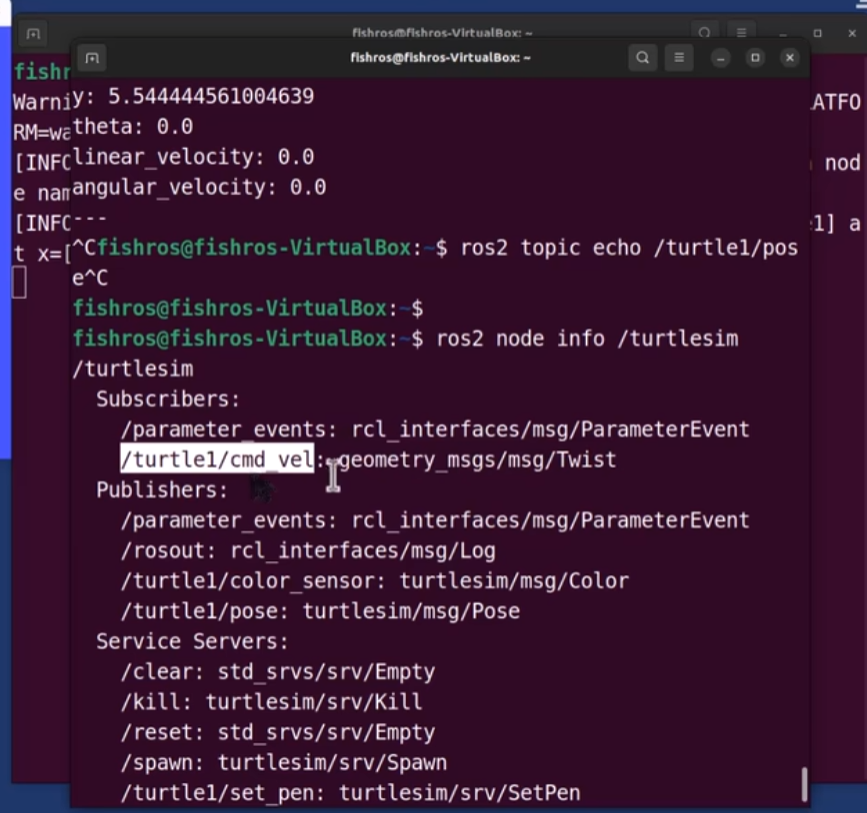
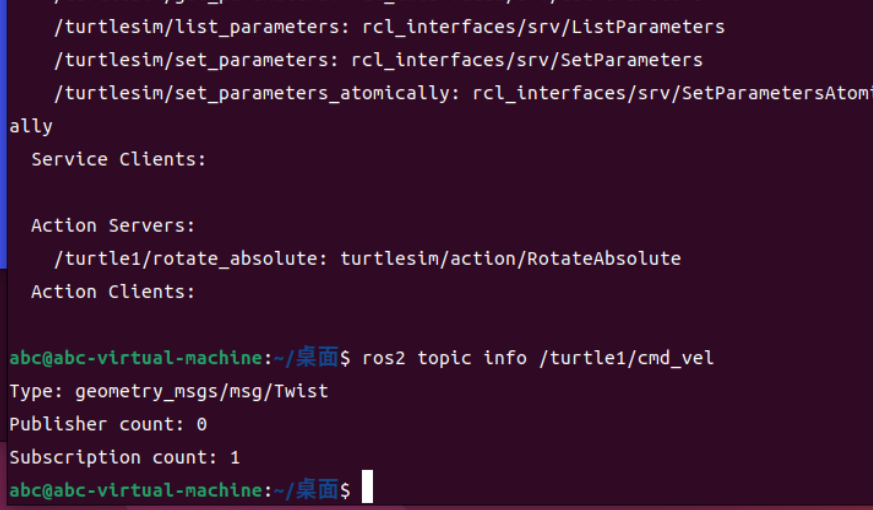 ros2 topic info /turtle1/cmd_vel,,就可以查看到话题的消息接口是什么了,他有几个发布者他有几个订阅者等等,这个里面没有发布者,只有订阅者,谁想控制小海龟谁就是订阅者
ros2 topic info /turtle1/cmd_vel,,就可以查看到话题的消息接口是什么了,他有几个发布者他有几个订阅者等等,这个里面没有发布者,只有订阅者,谁想控制小海龟谁就是订阅者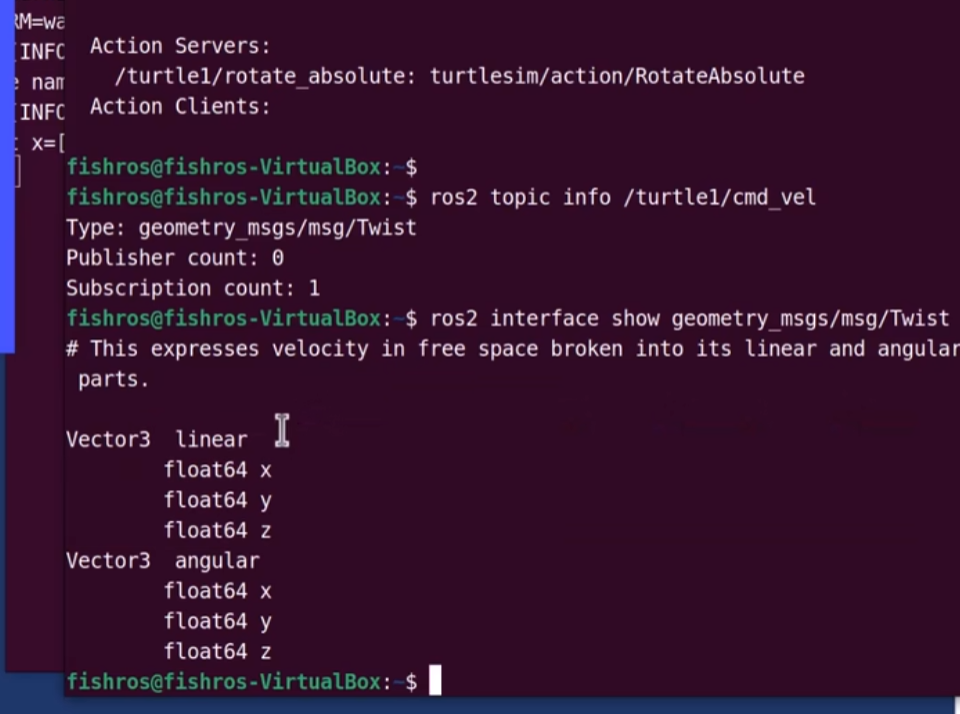 消息的接口内容如上图,线速度和角速度
消息的接口内容如上图,线速度和角速度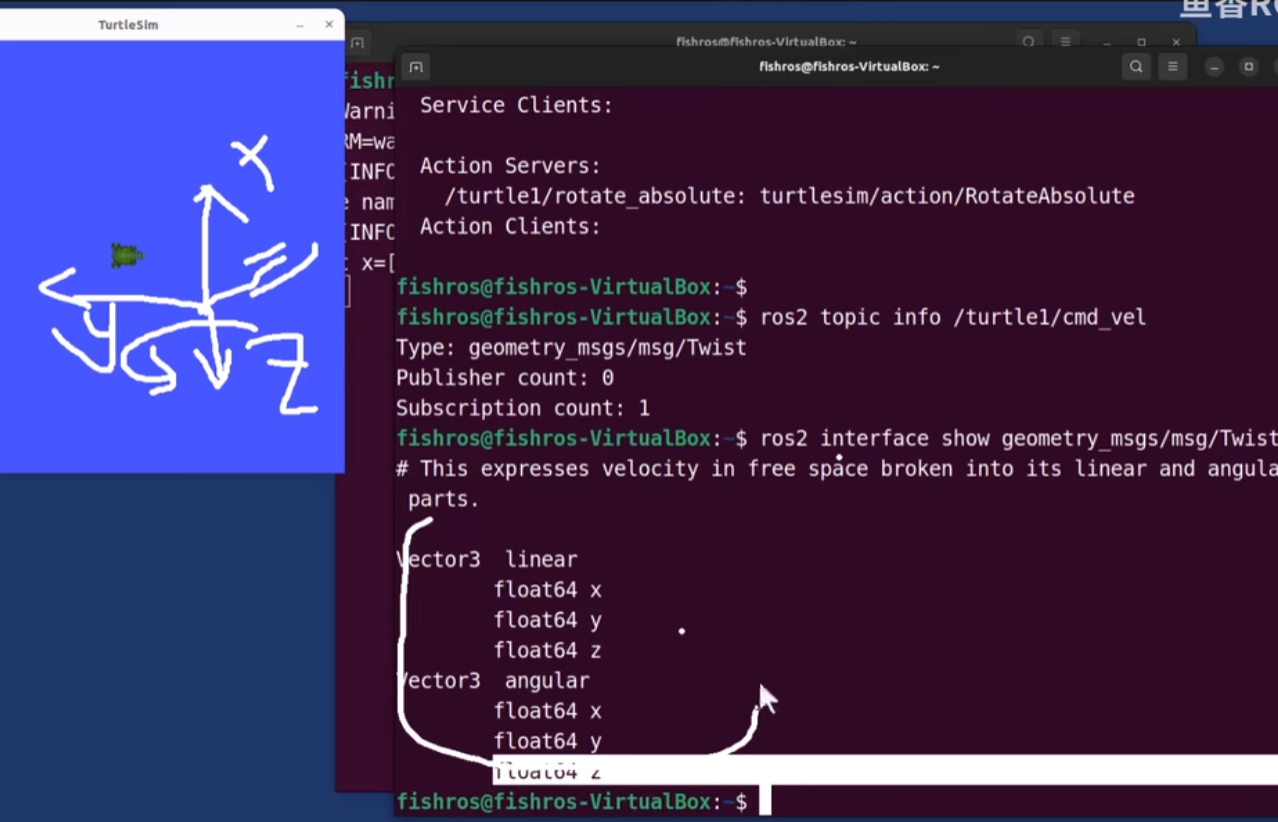 xyz轴,z轴是用来调小海龟的头朝向
xyz轴,z轴是用来调小海龟的头朝向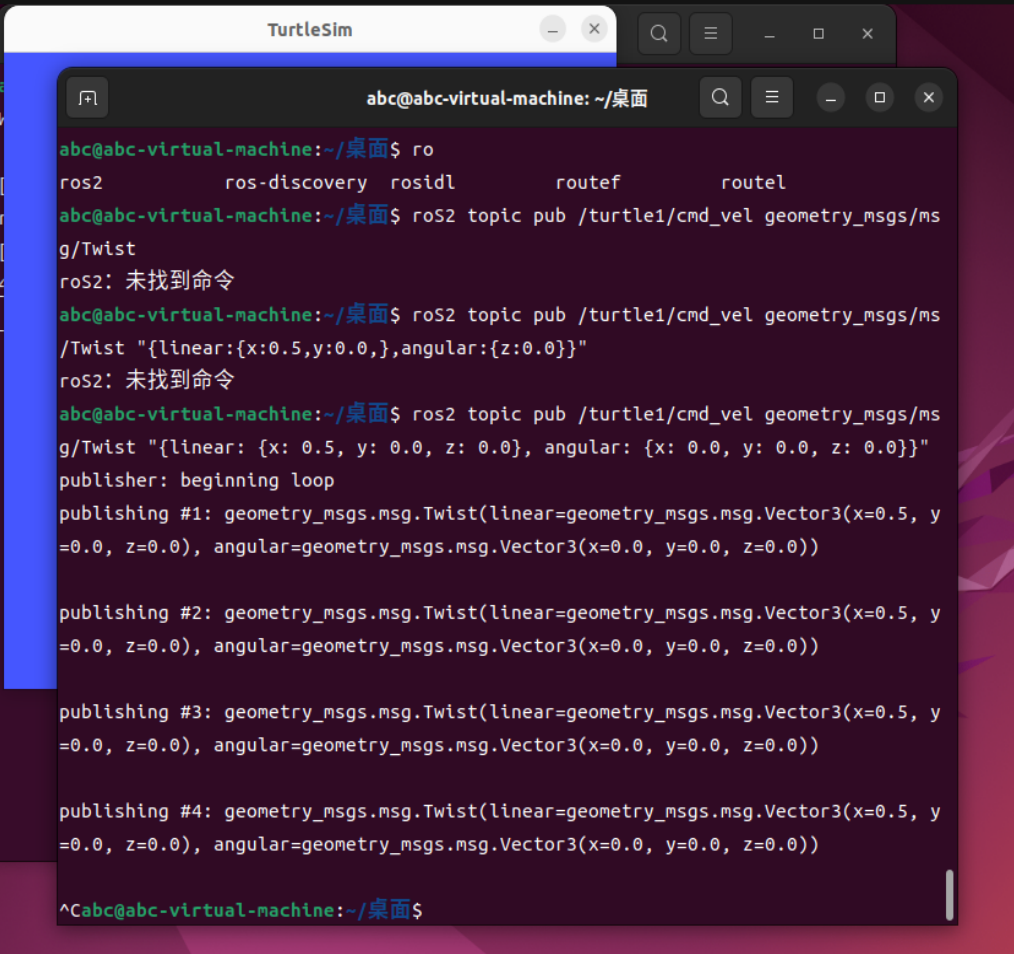 这是用来发布小海龟的运动参数,和mqtt差不多,但不是mqtt
这是用来发布小海龟的运动参数,和mqtt差不多,但不是mqtt