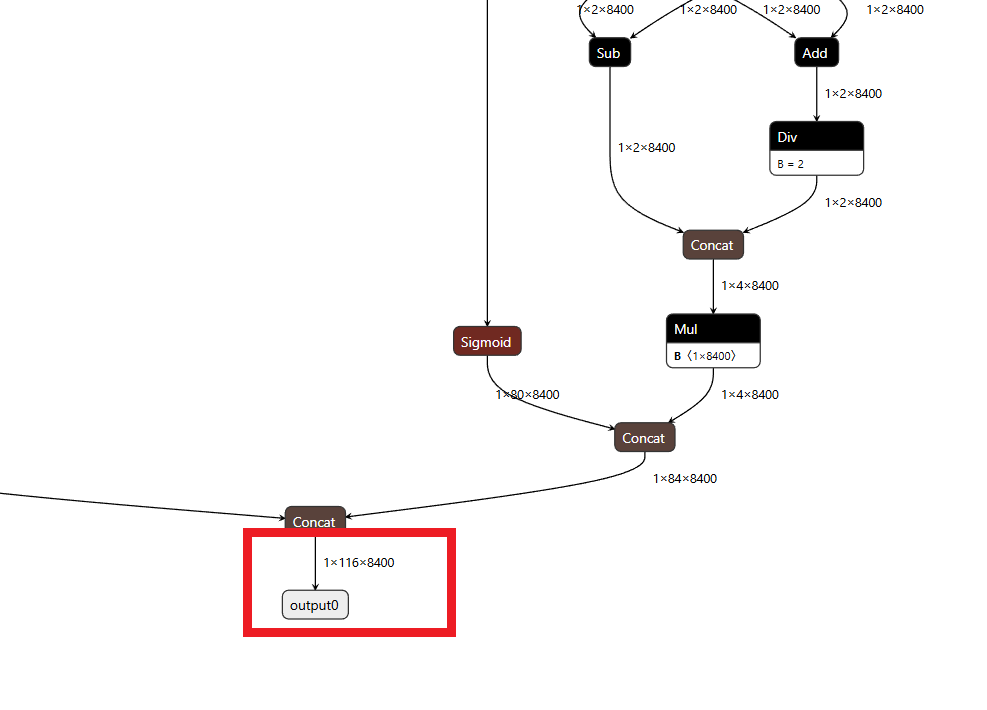
yolo26已经正式发布了,因此使用C++代码实现YOLO26-seg实例分割部署,首先看yolov11-seg网络结构,发现输出shape是1x116x8400
再来看看yolo26-seg网络结构输出,输出shape是1x300x38
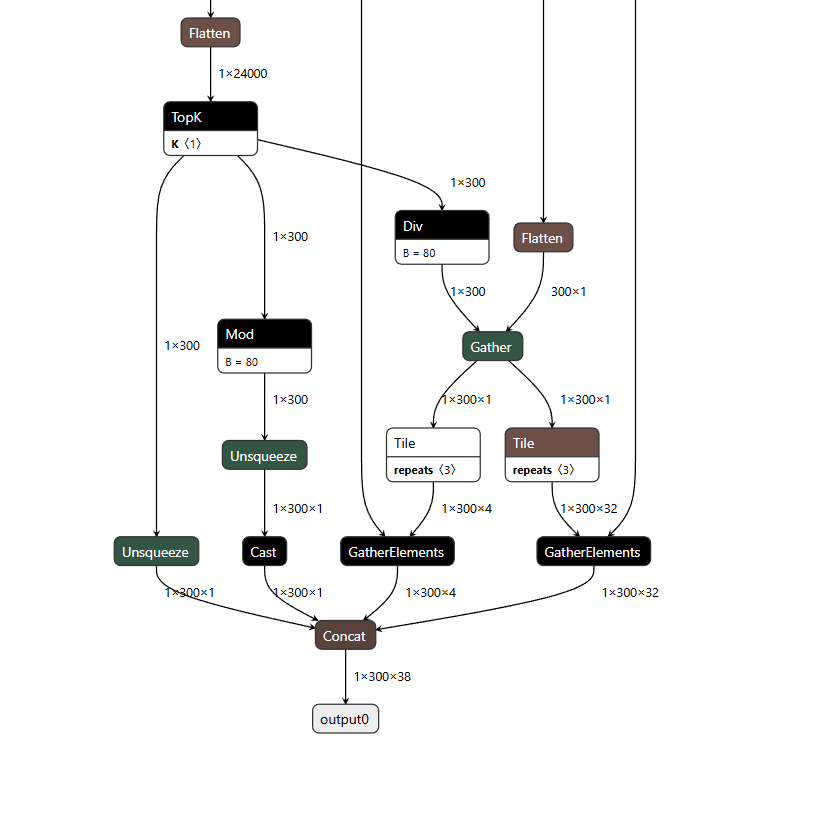
可见yolo11和yolo26输出是不一样的是不能共用代码。
安装好yolo26环境,要求ultralytics==8.4.0,转换命令
yolo export model=yolo26n-seg.pt format=onnx opset=12
测试环境:
vs2019
cmake==3.30.1
vs2019
onnxruntime-win-x64-gpu-1.20.1
opencv==4.9.0
运行步骤:
先删除build文件夹
然后打开CMakeLists.txt里面opencv和onnxruntime路径
重新cmake后会生成exe
测试命令:切换到exe路径后执行
测试图片:
yolo26_ort --input=test.jpg
测试摄像头:
yolo26_ort --input=0 --gpu 注意运行gpu需要安装onnxruntime-win-x64-gpu-1.20.1对应cuda这个官方可以查询到,测试cuda12.4+cudnn9.4.1可以其他版本应该也可以看要求
测试视频:
yolo26_ort --input=test_video.mp4 --output=result.mp4 --conf=0.3
调用代码:
#include <iostream>
#include <opencv2/opencv.hpp>
#include <chrono>
#include <algorithm>
#include "YOLO26Seg.hpp"
//注意如果onnx上推理显示为空,很可能是导出onnx问题,需要设置opset=12
struct Args
{
std::string model_path = "./yolo26n-seg.onnx";
std::string classes_path = "./labels.txt";
std::string input_path = "./input.mov";
std::string output_path = "./output.mp4";
bool use_gpu = false;
float conf_threshold = 0.25f;
float iou_threshold = 0.45f;
bool help = false;
};
void print_help()
{
std::cout << "YOLO26 C++ Object Segmatation\n\n";
std::cout << "Usage: ./yolo26_detector [options]\n\n";
std::cout << "Options:\n";
std::cout << " --model <path> Path to ONNX model file (default: ./best_fixed.onnx)\n";
std::cout << " --classes <path> Path to class names file (default: ./classes.txt)\n";
std::cout << " --input <path> Path to input video file or camera device index (default: ./input.mov)\n";
std::cout << " --output <path> Path to output video file (default: ./output.mp4)\n";
std::cout << " --gpu Use GPU acceleration if available (default: false)\n";
std::cout << " --conf <value> Confidence threshold (default: 0.25)\n";
std::cout << " --iou <value> IoU threshold for NMS (default: 0.45)\n";
std::cout << " --help Show this help message\n\n";
std::cout << "Examples:\n";
std::cout << " YOLO26_ort --input=test_video.mp4 --output=result.mp4 --conf=0.3\n";
std::cout << " YOLO26_ort --input=0 --gpu # Use webcam with GPU and Segmatation\n";
std::cout << " YOLO26_ort --input=test.jpg # Image Segmatation\n";
}
Args parse_args(int argc, char *argv[])
{
Args args;
for (int i = 1; i < argc; ++i)
{
std::string arg(argv[i]);
if (arg == "--help" || arg == "-h")
{
args.help = true;
}
else if (arg.find("--model=") == 0)
{
args.model_path = arg.substr(8);
}
else if (arg.find("--classes=") == 0)
{
args.classes_path = arg.substr(10);
}
else if (arg.find("--input=") == 0)
{
args.input_path = arg.substr(8);
}
else if (arg.find("--output=") == 0)
{
args.output_path = arg.substr(9);
}
else if (arg == "--gpu")
{
args.use_gpu = true;
}
else if (arg.find("--conf=") == 0)
{
args.conf_threshold = std::stof(arg.substr(7));
}
else if (arg.find("--iou=") == 0)
{
args.iou_threshold = std::stof(arg.substr(6));
}
else
{
std::cerr << "Unknown argument: " << arg << std::endl;
}
}
return args;
}
bool is_camera_input(const std::string &input)
{
try
{
std::stoi(input);
return true;
}
catch (const std::exception &)
{
return false;
}
}
bool is_image_file(const std::string &input)
{
std::string lower = input;
std::transform(lower.begin(), lower.end(), lower.begin(), ::tolower);
return lower.find(".jpg") != std::string::npos ||
lower.find(".jpeg") != std::string::npos ||
lower.find(".png") != std::string::npos ||
lower.find(".bmp") != std::string::npos;
}
void draw_fps(cv::Mat &frame, double fps)
{
std::string fps_text = "FPS: " + std::to_string(static_cast<int>(fps));
cv::putText(frame, fps_text, cv::Point(10, 30), cv::FONT_HERSHEY_SIMPLEX, 1.0, cv::Scalar(0, 255, 0), 2);
}
int main(int argc, char *argv[])
{
Args args = parse_args(argc, argv);
if (args.help)
{
print_help();
return 0;
}
std::cout << "YOLO26 C++ Object Detection & Segmentation\n";
std::cout << "============================================\n";
std::cout << "Model: " << args.model_path << "\n";
std::cout << "Classes: " << args.classes_path << "\n";
std::cout << "Input: " << args.input_path << "\n";
std::cout << "Output: " << args.output_path << "\n";
std::cout << "GPU: " << (args.use_gpu ? "enabled" : "disabled") << "\n";
std::cout << "Confidence threshold: " << args.conf_threshold << "\n";
std::cout << "IoU threshold: " << args.iou_threshold << "\n";
std::cout << "\n";
YOLO26SegDetector detector(args.model_path, args.classes_path, args.use_gpu);
if (is_image_file(args.input_path))
{
std::cout << "Processing single image: " << args.input_path << std::endl;
cv::Mat image = cv::imread(args.input_path);
if (image.empty())
{
std::cerr << "Error: Cannot read image file: " << args.input_path << std::endl;
return -1;
}
cv::Mat result = image.clone();
auto start_time = std::chrono::high_resolution_clock::now();
auto detections = detector.segment(image, args.conf_threshold, args.iou_threshold);
auto end_time = std::chrono::high_resolution_clock::now();
auto duration = std::chrono::duration_cast<std::chrono::milliseconds>(end_time - start_time);
std::cout << "Detection completed in " << duration.count() << "ms" << std::endl;
std::cout << "Detected " << detections.size() << " objects" << std::endl;
detector.drawSegmentationsAndBoxes(result, detections);
std::string output_path = args.output_path;
if (output_path == "./output.mp4")
{
size_t dot_pos = args.input_path.find_last_of('.');
std::string base_name = args.input_path.substr(0, dot_pos);
output_path = base_name + "_result.jpg";
}
cv::imwrite(output_path, result);
std::cout << "Result saved to: " << output_path << std::endl;
cv::Mat display_result;
double scale = std::min(1280.0 / result.cols, 720.0 / result.rows);
cv::Size display_size(result.cols * scale, result.rows * scale);
cv::resize(result, display_result, display_size);
cv::imshow("YOLO26 Result", display_result);
cv::waitKey(0);
return 0;
}
cv::VideoCapture cap;
if (is_camera_input(args.input_path))
{
int camera_id = std::stoi(args.input_path);
cap.open(camera_id);
std::cout << "Opening camera " << camera_id << std::endl;
}
else
{
cap.open(args.input_path);
std::cout << "Opening video file: " << args.input_path << std::endl;
}
if (!cap.isOpened())
{
std::cerr << "Error: Cannot open input source: " << args.input_path << std::endl;
return -1;
}
int frame_width = static_cast<int>(cap.get(cv::CAP_PROP_FRAME_WIDTH));
int frame_height = static_cast<int>(cap.get(cv::CAP_PROP_FRAME_HEIGHT));
double fps = cap.get(cv::CAP_PROP_FPS);
if (fps <= 0)
fps = 30.0;
std::cout << "Video properties: " << frame_width << "x" << frame_height << " @ " << fps << " FPS\n\n";
cv::VideoWriter writer;
if (!is_camera_input(args.input_path))
{
int fourcc = cv::VideoWriter::fourcc('m', 'p', '4', 'v');
writer.open(args.output_path, fourcc, fps, cv::Size(frame_width, frame_height));
if (!writer.isOpened())
{
std::cerr << "Error: Cannot open output video file: " << args.output_path << std::endl;
return -1;
}
std::cout << "Output will be saved to: " << args.output_path << std::endl;
}
auto start_time = std::chrono::high_resolution_clock::now();
int frame_count = 0;
double avg_fps = 0.0;
cv::Mat frame;
std::cout << "\nProcessing... Press 'q' to quit.\n\n";
while (true)
{
auto frame_start = std::chrono::high_resolution_clock::now();
if (!cap.read(frame))
{
if (is_camera_input(args.input_path))
{
std::cerr << "Error reading from camera" << std::endl;
break;
}
else
{
std::cout << "End of video file reached" << std::endl;
break;
}
}
cv::Mat result = frame.clone();
auto detections = detector.segment(frame, args.conf_threshold, args.iou_threshold);
detector.drawSegmentationsAndBoxes(result, detections);
auto frame_end = std::chrono::high_resolution_clock::now();
auto frame_duration = std::chrono::duration_cast<std::chrono::milliseconds>(frame_end - frame_start);
double current_fps = 1000.0 / frame_duration.count();
frame_count++;
avg_fps = (avg_fps * (frame_count - 1) + current_fps) / frame_count;
draw_fps(result, current_fps);
if (is_camera_input(args.input_path))
{
cv::imshow("YOLO26 seg", result);
char key = cv::waitKey(1) & 0xFF;
if (key == 'q' || key == 27)
{
break;
}
}
if (writer.isOpened())
{
writer.write(result);
}
if (!is_camera_input(args.input_path) && frame_count % 30 == 0)
{
std::cout << "Processed " << frame_count << " frames, Average FPS: "
<< static_cast<int>(avg_fps) << std::endl;
}
}
cap.release();
if (writer.isOpened())
{
writer.release();
}
cv::destroyAllWindows();
auto end_time = std::chrono::high_resolution_clock::now();
auto total_duration = std::chrono::duration_cast<std::chrono::seconds>(end_time - start_time);
std::cout << "\nProcessing completed!\n";
std::cout << "Total frames processed: " << frame_count << std::endl;
std::cout << "Total time: " << total_duration.count() << " seconds\n";
std::cout << "Average FPS: " << static_cast<int>(avg_fps) << std::endl;
return 0;
}最后测试效果:
