ros2的底层通讯方式只有dds,话题通讯这一种通讯方式,所谓的服务通讯其实是由两个话题来构成的,参数通讯由多个服务加话题一起构成,最终还是话题通讯,基于话题通讯才有服务通讯,由服务通讯才有参数。
服务是双向通讯
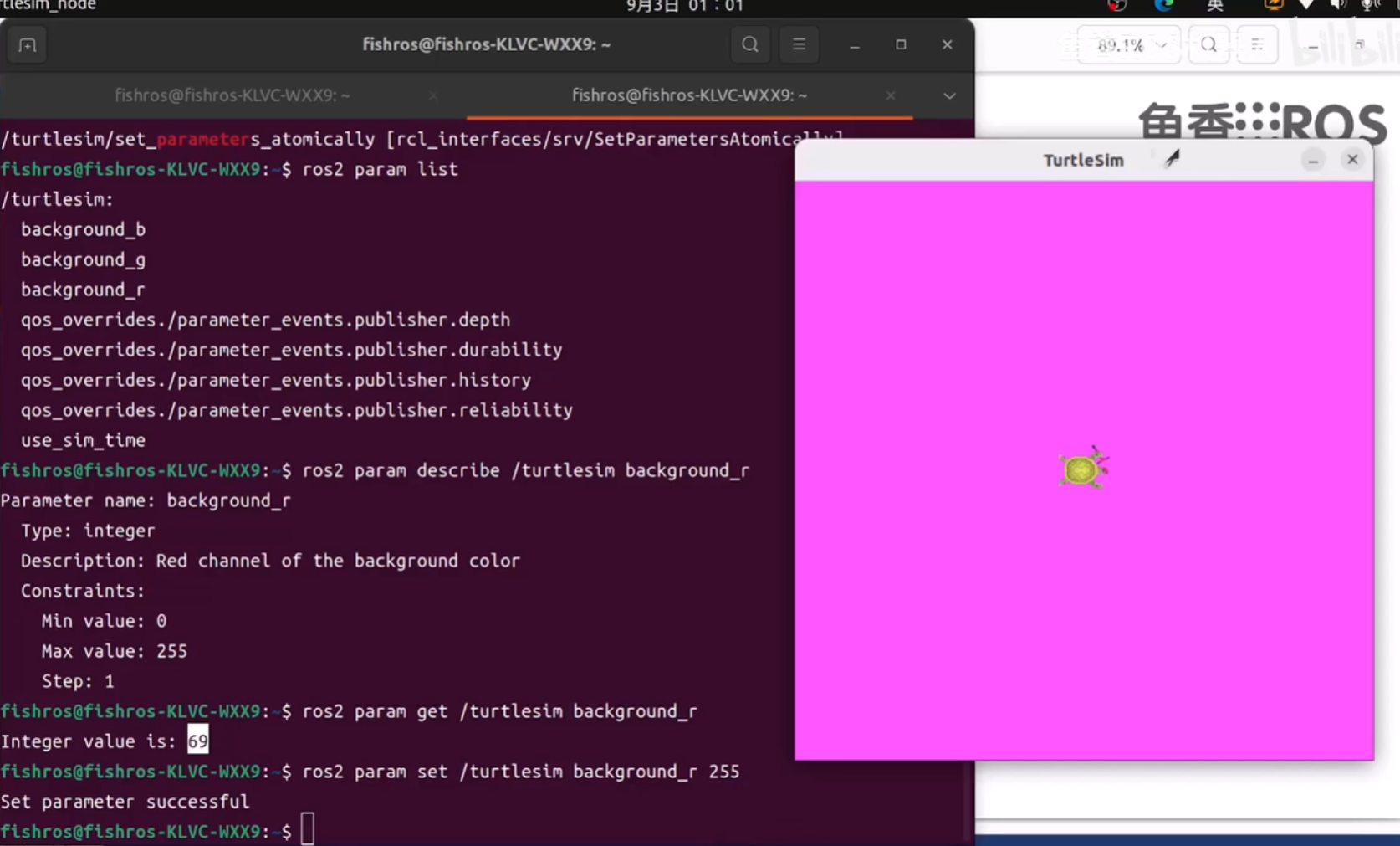 改小海龟的背景色节点系数
改小海龟的背景色节点系数
可以通过rqt指令动态调节参数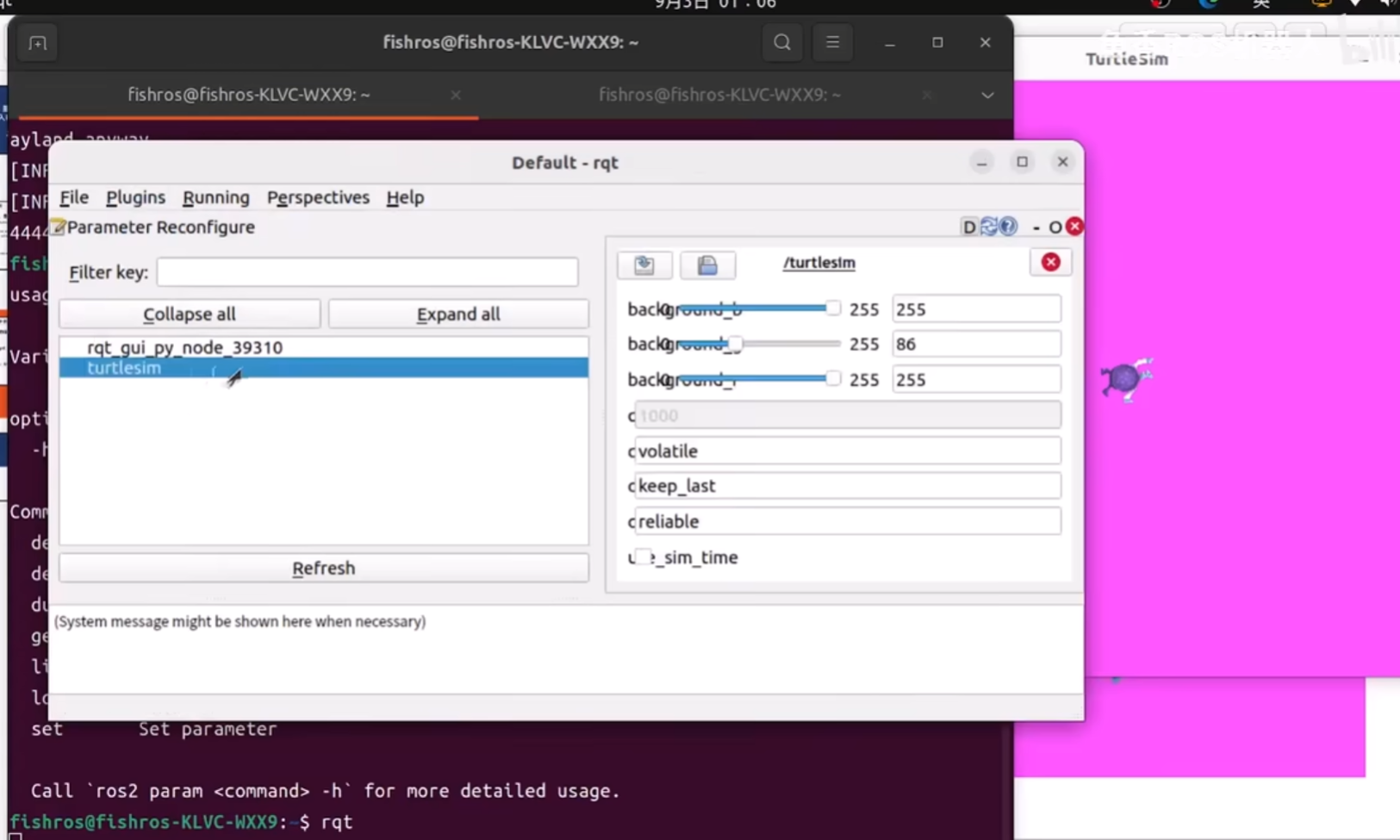
ros2的底层通讯方式只有dds,话题通讯这一种通讯方式,所谓的服务通讯其实是由两个话题来构成的,参数通讯由多个服务加话题一起构成,最终还是话题通讯,基于话题通讯才有服务通讯,由服务通讯才有参数。
服务是双向通讯
改小海龟的背景色节点系数
可以通过rqt指令动态调节参数