系列文章目录
安装UBUNTU系统与ROS Noetic:https://blog.csdn.net/weixin_70411664/article/details/157024148?fromshare=blogdetail&sharetype=blogdetail&sharerId=157024148&sharerefer=PC&sharesource=weixin_70411664&sharefrom=from_link
文章目录
[1. 注册 Intel 的密钥](#1. 注册 Intel 的密钥)
[2. 添加 Intel 软件仓库](#2. 添加 Intel 软件仓库)
[3. 安装驱动库](#3. 安装驱动库)
[4. 验证安装(关键时刻!)](#4. 验证安装(关键时刻!))
前言
安装 RealSense SDK (驱动层),这一步是让电脑能识别到摄像头,并能看到图像。
提示:以下是本篇文章正文内容,下面案例可供参考
1. 注册 Intel 的密钥
打开终端(
Ctrl+Alt+T),复制粘贴以下命令:
bashsudo apt-key adv --keyserver keyserver.ubuntu.com --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE || sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE2. 添加 Intel 软件仓库
bashsudo add-apt-repository "deb https://librealsense.intel.com/Debian/apt-repo $(lsb_release -cs) main" -u3. 安装驱动库
这里我们要安装三个东西:内核模块 (
dkms)、工具 (utils) 和开发库 (dev)。 注意:librealsense2-dev非常重要,以后你编译 Ego-Planner 时需要用到它。
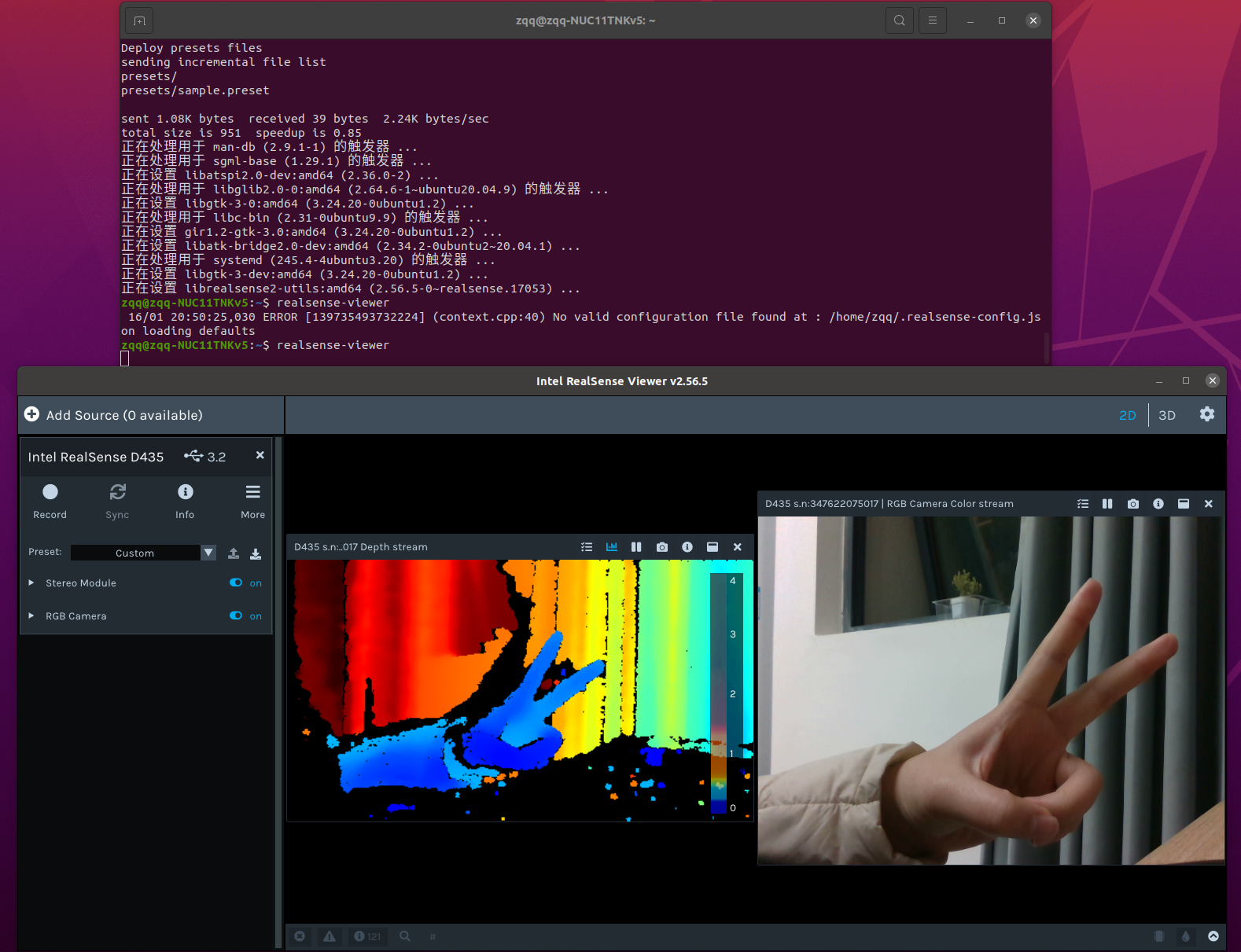
bashsudo apt-get install librealsense2-dkms librealsense2-utils librealsense2-dev4. 验证安装(关键时刻!)
把你的 RealSense 相机(如 D435i/D455) 插到 NUC 的 蓝色 USB 3.0 接口 上(千万别插黑色 USB 2.0 口,带宽不够)。
在终端输入:
bashrealsense-viewer如果弹出一个窗口,左边有个开关,打开后能看到彩色画面和深度画面(花花绿绿的),恭喜你,驱动装好了!
看完后关闭窗口。