在医学图像配准(Registration)的任务中,SimpleITK 是最常用的工具库。然而,官方示例代码中往往隐藏着许多 Python 高级特性(如闭包)和医学图像特有的空间几何逻辑(如物理坐标转换)。
本文将抽丝剥茧,不仅讲解配准原理,更要深入拆解代码中那些**"容易被忽视但至关重要"**的技术细节。
一、Python 进阶:回调函数中的 lambda 与闭包
在配置配准过程的监控(Visualization)时,你会看到这样一段代码:
Python
# 注册迭代事件的回调函数
registration_method.AddCommand(
sitk.sitkIterationEvent,
lambda: rc.metric_and_reference_plot_values(
registration_method, fixed_points, moving_points
),
)1. 为什么要用 lambda?
这里使用 lambda 不是为了简便,而是为了解决函数签名(Function Signature)不匹配的问题。
-
API 限制 :
AddCommand方法要求传入的回调函数(Callback)必须是无参数 的函数指针,即void function()。 -
实际需求 :我们的绘图函数
rc.metric_and_reference_plot_values需要参数 。它必须访问registration_method(获取当前 Metric 值)和points(计算 TRE)。
2. 闭包(Closure)的魔法
为了解决上述冲突,我们使用了 闭包 技术:
-
lambda定义了一个匿名函数,该函数本身不接收参数(符合 API 要求)。 -
但在函数体内部,它通过闭包(Closure) 捕获了外部作用域中的变量
registration_method,fixed_points,moving_points。 -
当
sitkIterationEvent触发时,SimpleITK 调用这个无参 lambda,lambda 内部再带着捕获的变量去调用实际的绘图函数。
二、核心策略:多分辨率金字塔 (Multi-Resolution)
配准中最核心的配置如下:
Python
registration_method.SetShrinkFactorsPerLevel(shrinkFactors=[4, 2, 1])
registration_method.SetSmoothingSigmasPerLevel(smoothingSigmas=[2, 1, 0])
registration_method.SmoothingSigmasAreSpecifiedInPhysicalUnitsOn()深度解析
这是让配准既快 又准的"三步走"战略(Coarse-to-Fine):
-
Level 0 (Shrink=4, Sigma=2mm):
-
动作:图像缩小 4 倍,且进行高斯模糊。
-
目的 :极速粗配准。模糊细节,让优化器只看"大轮廓",避免陷入局部极小值。
-
-
Level 1 (Shrink=2, Sigma=1mm):
-
动作:图像缩小 2 倍,轻微模糊。
-
目的:进一步细化位置。
-
-
Level 2 (Shrink=1, Sigma=0):
-
动作:原始分辨率,不模糊。
-
目的 :精细微调,达到最终精度。
-
-
关于单位 (
PhysicalUnitsOn):- 这行代码强制告诉 ITK:上面的
[2, 1, 0]单位是毫米(mm),而不是像素个数。这保证了在不同分辨率的 CT/MRI 数据上,平滑的物理程度是一致的。
- 这行代码强制告诉 ITK:上面的
三、结果评估:可视化图表的玄机
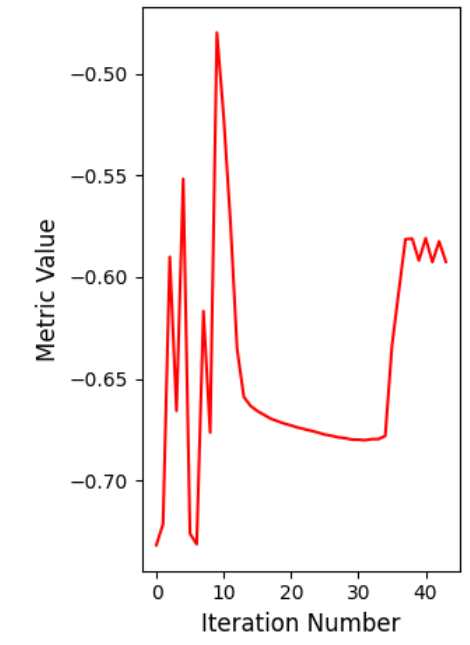
1. 实时监控图(折线图)
-
为什么曲线会跳变?
-
你会发现 Metric 曲线在迭代过程中有几次剧烈的"断崖式"跳跃。这正是金字塔层级切换的标志。
-
从模糊图像切换到清晰图像,计算 Metric 的基准变了,分数自然不同。这是正常的。
-
-
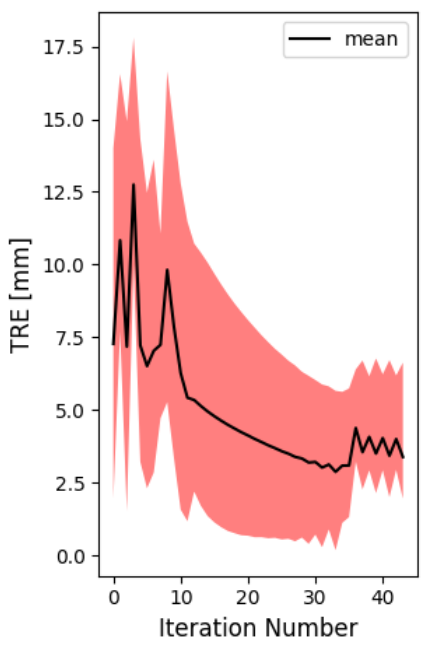
阴影面积代表什么?
-
右侧 TRE 图中的红色阴影代表 误差的标准差 (Std Dev)。
-
阴影越宽 :说明点与点之间的误差差异大(有的准,有的歪),通常意味着存在旋转偏差。
-
阴影越窄:说明大家误差都很均匀,配准结果稳定。
-
2. 最终结果图(3D 散点图)
-
色条的含义 :如果不强制设置
min/max,程序会根据当前结果自动归一化颜色。-
黑色/红色 = 误差最小的区域。
-
亮黄色/白色 = 误差最大的区域。
-
-
临床意义 :这张图能揭示空间不均匀性 。比如中心区域(旋转轴)可能是黑色的(准),但边缘区域是黄色的(误差大)。只看平均值是无法发现这种"杠杆效应"带来的边缘误差的。
四、硬核数学:ROI 筛选与坐标转换
在临床评估中,我们往往只需要计算脑部区域的误差,需要剔除背景噪点。这涉及到了复杂的空间几何操作。
Python
# 1. 忽略背景,计算包围盒
label_shape_analysis.SetBackgroundValue(0)
label_shape_analysis.Execute(roi)
bounding_box = label_shape_analysis.GetBoundingBox(1)
# 2. 核心难点:像素索引 -> 物理坐标
sub_image_max = fixed_image.TransformIndexToPhysicalPoint(
(
bounding_box[0] + bounding_box[3] - 1, # X轴终点
bounding_box[1] + bounding_box[4] - 1, # Y轴终点
bounding_box[2] + bounding_box[5] - 1, # Z轴终点
)
)Q1:SetBackgroundValue(0) 是什么意思?
roi 是二值图像(0为背景,1为人体)。这句话明确告诉统计滤波器:"请忽略数值为 0 的区域,只计算数值为 1(即人体)的几何形状。"
Q2:像素如何转物理坐标?
SimpleITK 中的图像带有元数据(Metadata):
-
Origin (原点)
-
Spacing (间距/步长)
-
Index (第几个像素)
转换公式为:

代码中的 TransformIndexToPhysicalPoint 就是在执行这个公式。
Q3:为什么计算 Max 时要 -1?
这是一个经典的栅栏问题(Off-by-one error)。
-
假设包围盒 X 轴起点索引是
10,长度是5。 -
它占据的像素是:
10, 11, 12, 13, 14。 -
最后一个像素的索引是
14。 -
计算公式:
 。
。 -
如果直接用
 ,第 15 号像素已经在盒子外面了。必须减 1 才能定位到物体边缘的那个像素。
,第 15 号像素已经在盒子外面了。必须减 1 才能定位到物体边缘的那个像素。
Q4:筛选逻辑
最后,利用计算出的物理空间立方体(Bounding Box),使用 zip 遍历所有解剖点对,通过简单的 if 判断:
Python
if min_x <= p[0] <= max_x and ... :
keep_point()这实现了**"只保留落在脑壳里的点,剔除外面干扰点"**的严谨评估逻辑。
希望这篇总结能帮到正在学习 SimpleITK 的你!如果有帮助,请点赞收藏。