传统爬壁机器人通常依赖于特定的吸附机制(如磁吸附、真空吸附、仿生干粘附等),这限制了它们只能在单一介质(空气或水中)和特定材料表面(如磁性表面、干燥光滑表面)上工作。理想的爬壁机器人应具备在陆地、水下及潮湿区域(包括穿越气-水界面)自由爬行的能力,并能适应不同材料和不平整的表面形貌。来自西安交通大学等的研究团队从自然界中汲取灵感,创造性地将壁虎和章鱼的粘附机制相结合,提出了空心蘑菇形粘附微结构,该结构同时具备了壁虎蘑菇形干粘附结构的形态和章鱼空心吸盘的空腔结构。成功开发出一种兼具高性能跨介质粘附、优异抗剥离能力和出色接触适应性的爬壁机器人。相关成果于2026年1月7日以"Bioinspired cross-medium wall-climbing robot with high-performance adhesion and contact adaptability"发表在《Science Advances》。 
图1. 跨介质爬壁机器人的任务场景描述与宏观结构。
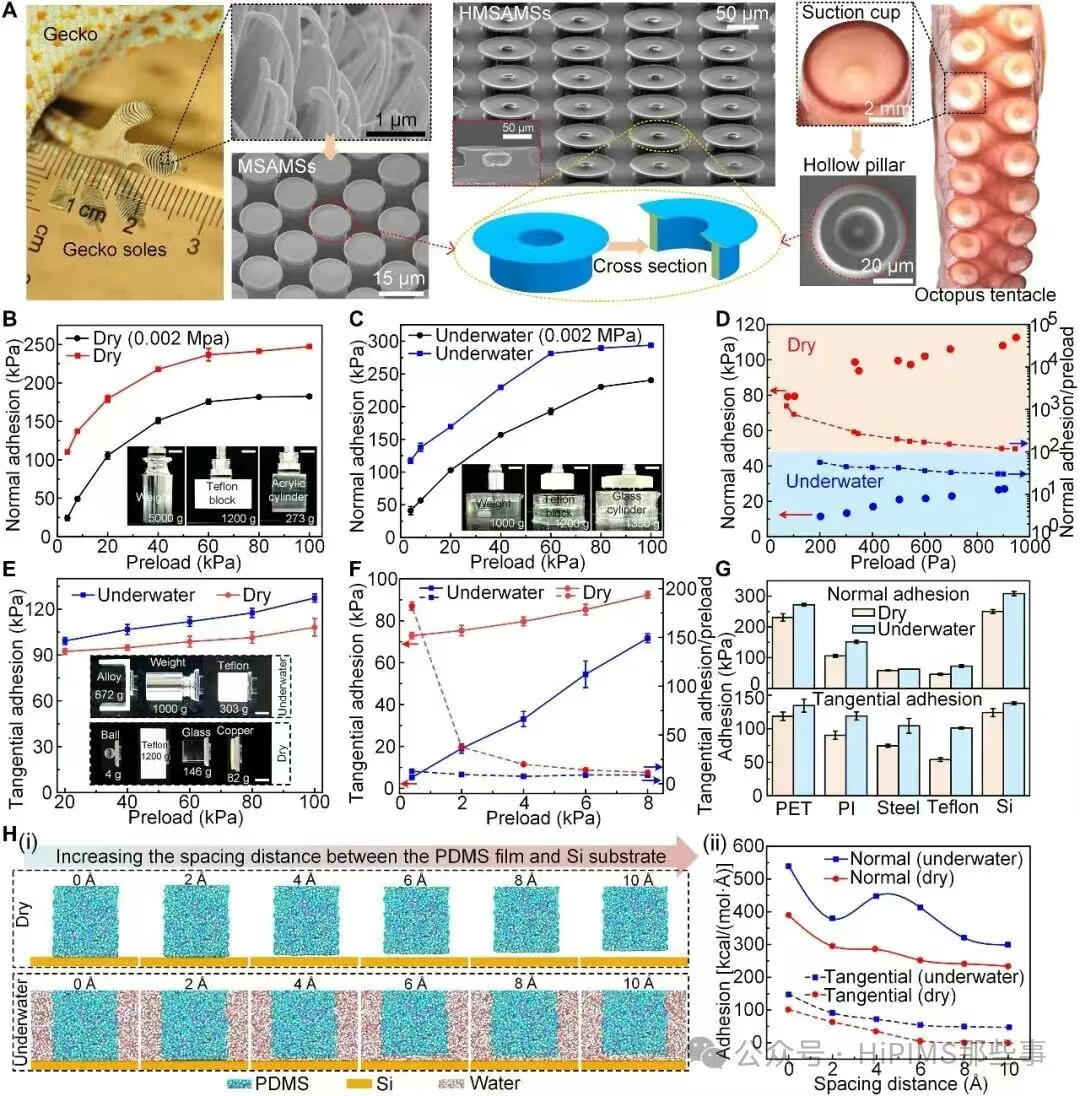
图2. 仿生爬壁机器人的微形态特征与粘附性能。
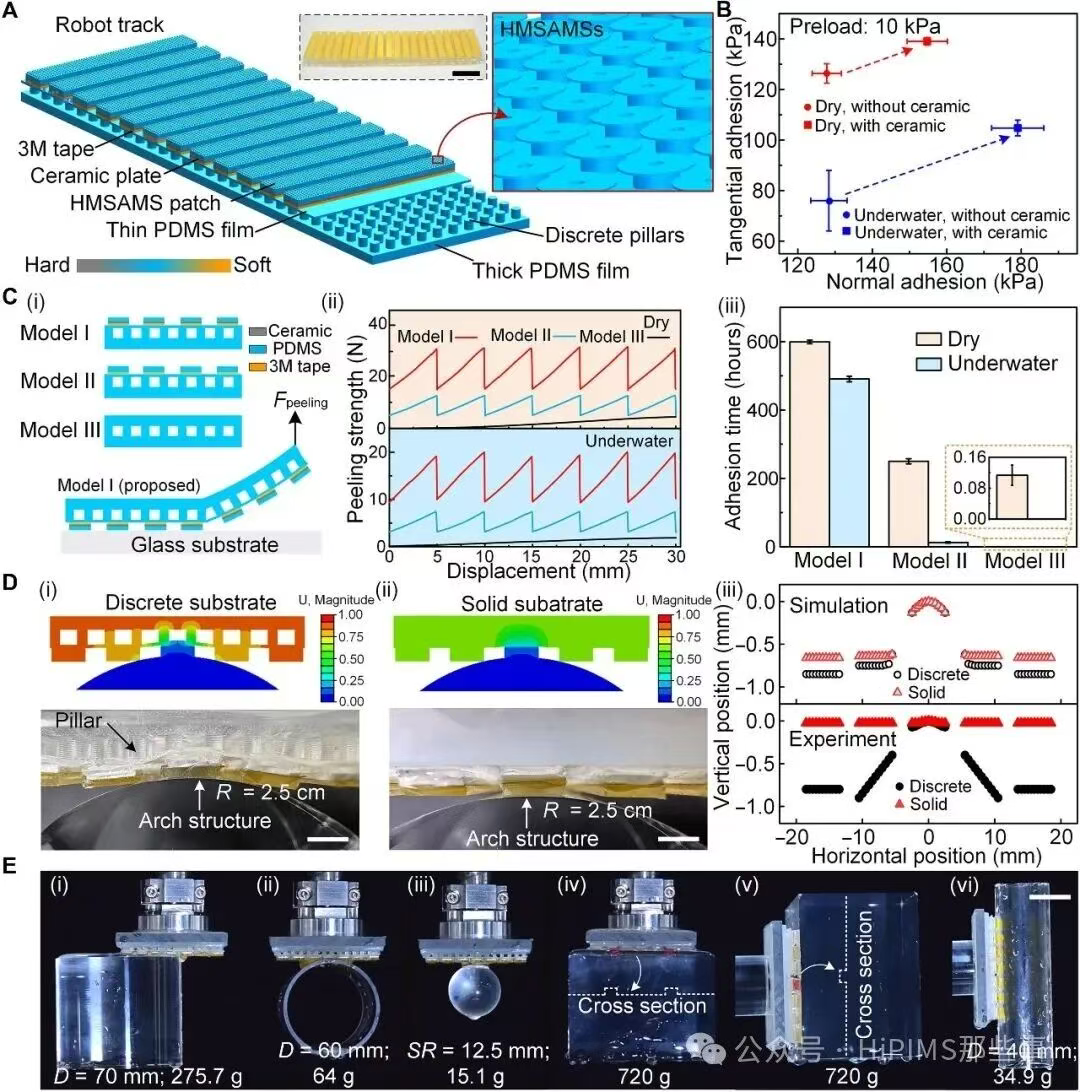
图3. 机器人履带的宏观分层结构、粘附性能与接触适应性。
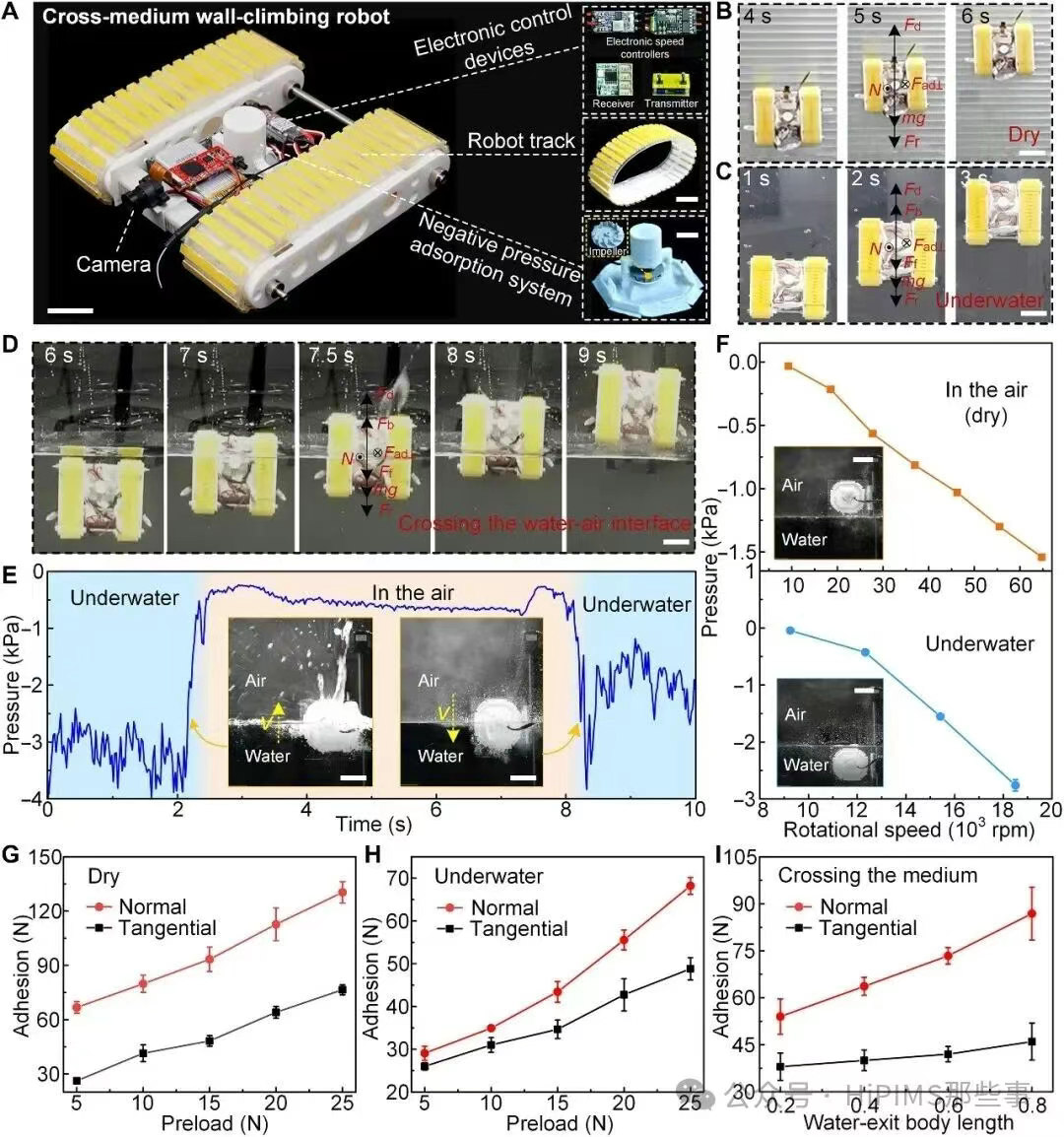
图4. 跨介质爬壁机器人的多介质与跨介质粘附性能。
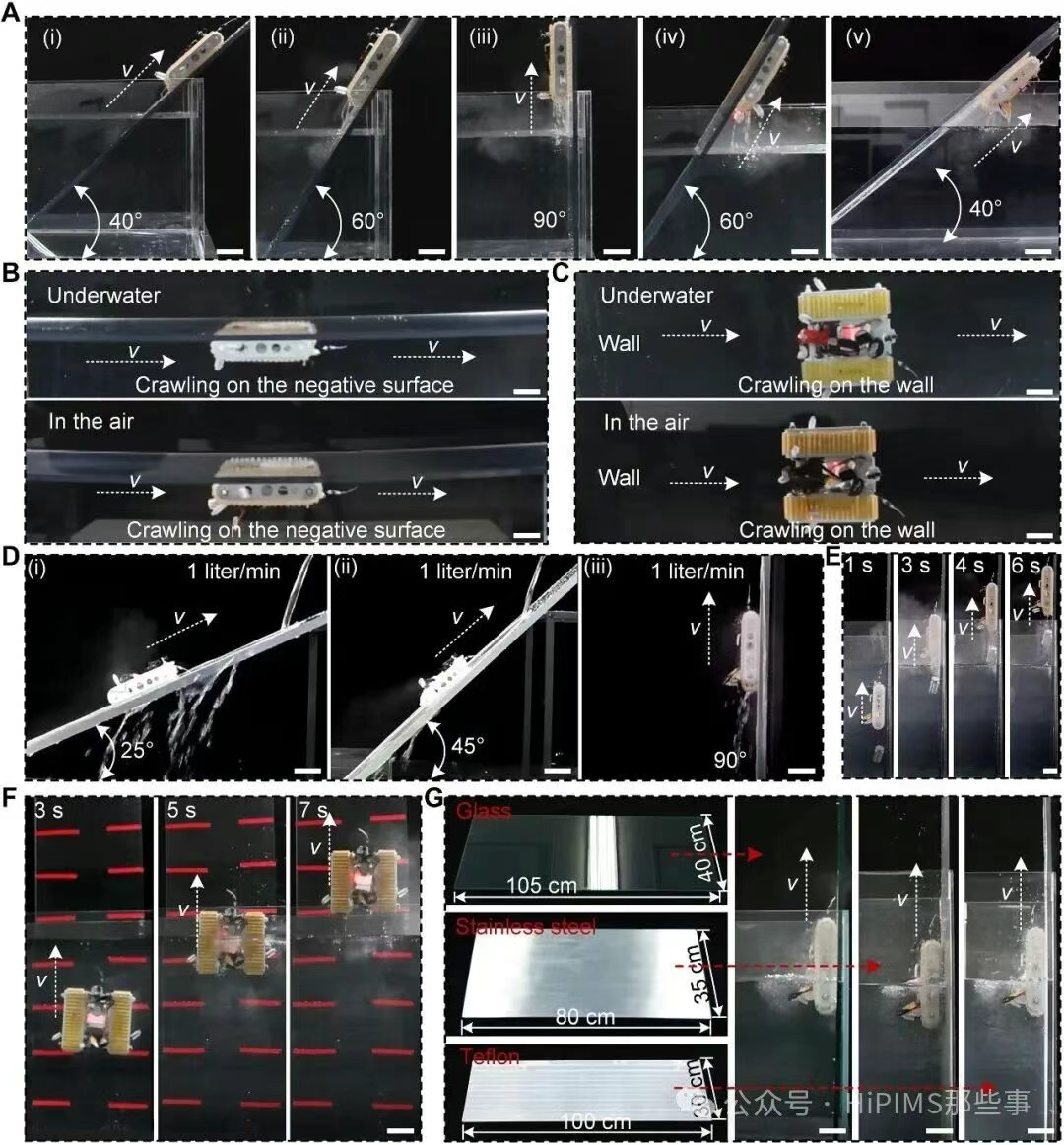
图5. 跨介质爬壁机器人的多介质与跨介质爬壁性能。
图6. 跨介质爬壁机器人的现场应用。这项研究通过仿生融合与分层结构设计,成功开发出一种兼具高性能跨介质粘附、优异抗剥离能力和出色接触适应性的爬壁机器人。其核心创新点在于:巧妙结合了壁虎和章鱼的粘附优势。采用刚柔混合履带,从微观到宏观模仿了生物体的多种功能,实现了性能的协同增强。该机器人降低了对表面材料、形貌、湿度和倾斜度的特定要求,相比现有技术具有显著优势。尽管目前仍是一个概念验证原型,但在尺寸、功能(如地面-墙面过渡、智能自适应控制)方面仍有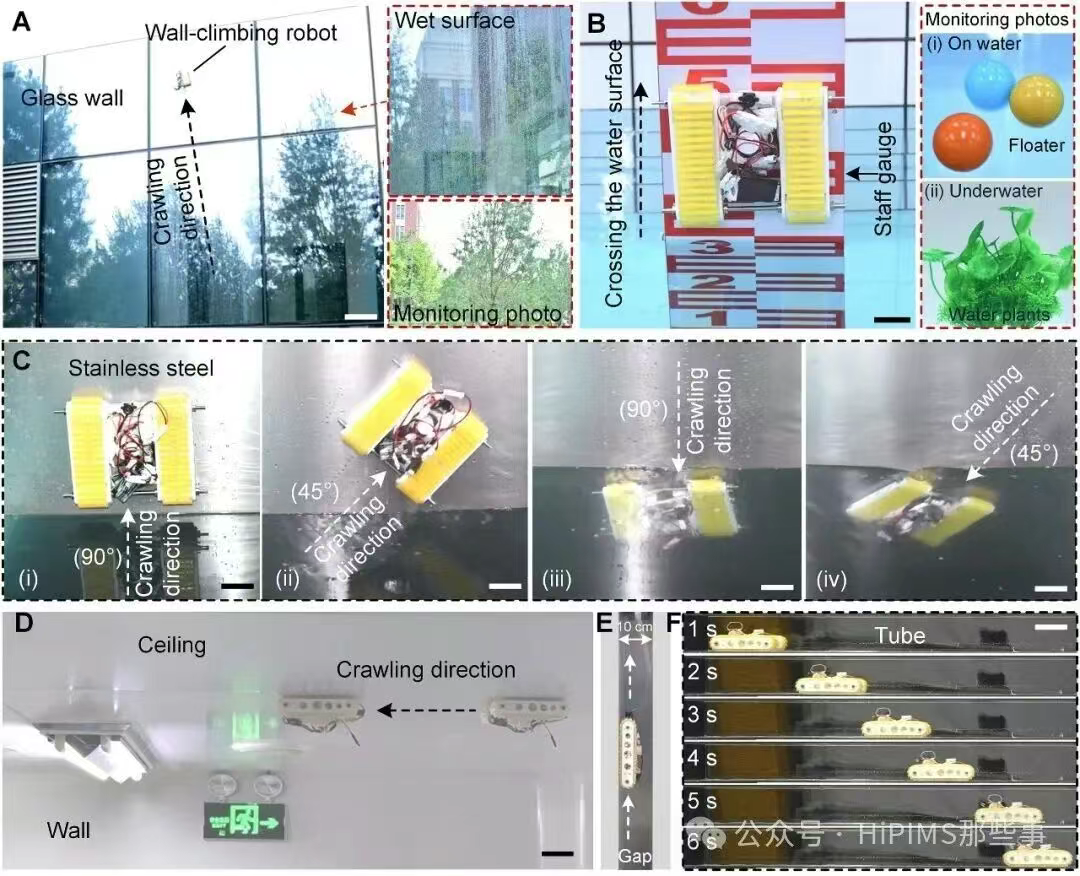
优化空间。其所采用的双曝光填充技术相比双光子聚合等方法,在成本效益和量产能力上更具优势,有利于未来规模化应用。这项研究极大地推动了爬壁机器人在复杂多媒体环境下的通用化应用进程。论文链接:https://www.science.org/doi/10.1126/sciadv.aea8014