码垛机器人分析和仿真。 Matlab Simulink simscape仿真
在自动化生产领域,码垛机器人扮演着至关重要的角色。它们能够高效地将产品按照特定规则进行堆放,大大提升了生产效率。今天,咱们就来聊聊如何借助Matlab Simulink Simscape对码垛机器人进行分析与仿真。
码垛机器人基础分析
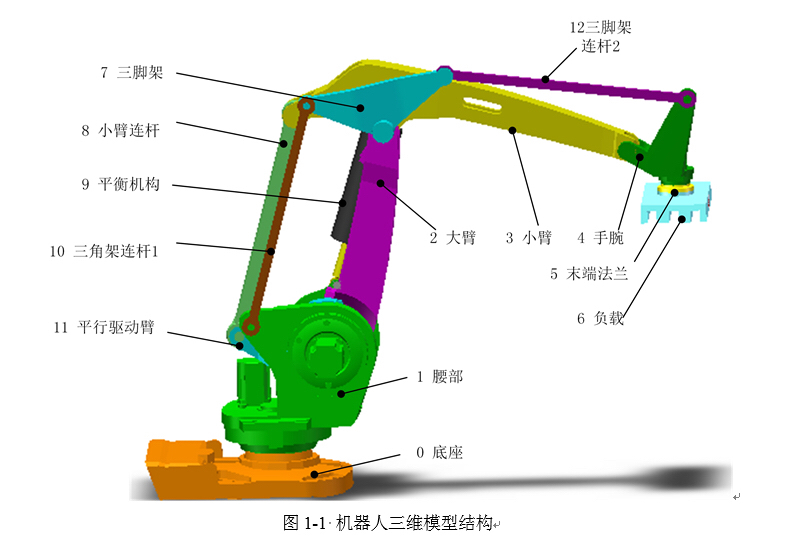
码垛机器人通常由机械臂、末端执行器、控制系统等部分构成。机械臂决定了机器人的运动范围和灵活性,末端执行器负责抓取和放置物体。以常见的四轴码垛机器人为例,它的运动学模型建立是分析的关键。
码垛机器人分析和仿真。 Matlab Simulink simscape仿真
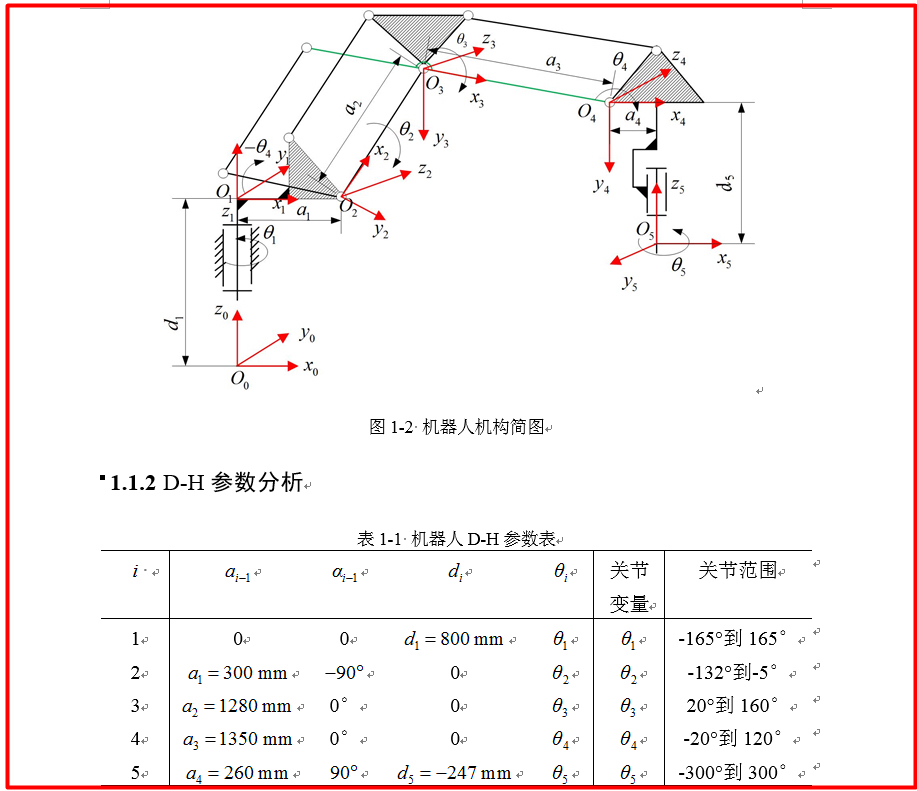
假设我们有一个简单的四轴机器人模型,每个关节都可独立转动。为了描述机器人末端在空间中的位置和姿态,我们需要用到齐次变换矩阵。在Matlab中,可以这样构建齐次变换矩阵函数:
matlab
function T = homogeneous_transform(theta, d, a, alpha)
T = [cos(theta) -sin(theta)*cos(alpha) sin(theta)*sin(alpha) a*cos(theta);
sin(theta) cos(theta)*cos(alpha) -cos(theta)*sin(alpha) a*sin(theta);
0 sin(alpha) cos(alpha) d;
0 0 0 1];
end这段代码中,theta 是关节角度,d 是关节偏距,a 是连杆长度,alpha 是连杆扭转角。通过这个函数,我们能根据不同的关节参数计算出每个连杆的齐次变换矩阵,进而确定机器人末端的位姿。
Matlab Simulink Simscape仿真搭建
模型导入与初步设置
Simscape是Matlab中强大的多领域物理建模与仿真工具。首先,我们要在Simulink中搭建码垛机器人的模型。可以从Simscape库中拖入相应的机械部件模块,比如关节模块、连杆模块等。以一个简单的双关节机械臂为例:
- 从Simscape Multibody库中拖入"Revolute Joint"(旋转关节)模块两个,分别代表两个关节。
- 拖入"Rigid Transform"模块连接两个关节,模拟连杆。
- 连接好各个模块后,设置每个关节的初始角度、连杆长度等参数。
动力学建模与仿真
在完成模型搭建后,我们要对其进行动力学建模。Simscape会根据我们搭建的模型自动生成动力学方程。为了让机器人按照特定轨迹运动,我们需要添加输入信号。比如,我们希望第一个关节按照正弦规律运动,可以在第一个关节的"Joint Position Input"端口连接一个"Sine Wave"信号源模块。设置信号源的幅值、频率等参数,就能控制关节的运动。
matlab
% 以下是简单控制关节运动的代码示例
time = 0:0.01:10; % 时间范围
amplitude = pi/2; % 正弦幅值
frequency = 0.5; % 频率
theta1 = amplitude * sin(2*pi*frequency*time);
figure;
plot(time, theta1);
xlabel('Time (s)');
ylabel('Joint Angle (rad)');
title('First Joint Angle Over Time');这段Matlab代码生成了一个正弦信号,用来模拟第一个关节的角度变化。通过可视化这个角度变化,我们能直观地看到关节运动情况,这对于分析机器人运动是否符合预期非常有帮助。
仿真结果分析
运行仿真后,我们可以从多个方面分析结果。比如观察机械臂末端的运动轨迹是否符合预期的码垛路径。在Simulink中,可以使用"XY Graph"模块来绘制机械臂末端在二维平面的轨迹。如果轨迹出现偏差,我们就需要检查模型参数设置、运动学方程是否正确等。还可以分析关节的扭矩变化,这对于选择合适的电机驱动关节运动至关重要。
通过Matlab Simulink Simscape对码垛机器人进行分析与仿真,我们能在实际制造之前深入了解机器人的性能,优化设计,节省时间和成本,为自动化生产的高效实现奠定坚实基础。无论是新手探索还是老手优化,这都是一个强大且有趣的工具。