最近准备复现Universal Manipulation Interface 遥操,在选择相机时,考虑到先快速验证下视觉模块,刚好手里有台 iphone 15 pro,这不巧了嘛,iphone自带LiDAR,有RGB图像、深度图、pose,刚好满足数据采集的需要。
目录
1.环境搭建
- APP:
Record3D
- PC端环境构建:record3d
这里因为需要快速的功能验证,选择Python进行部署:

2.源码和实际使用
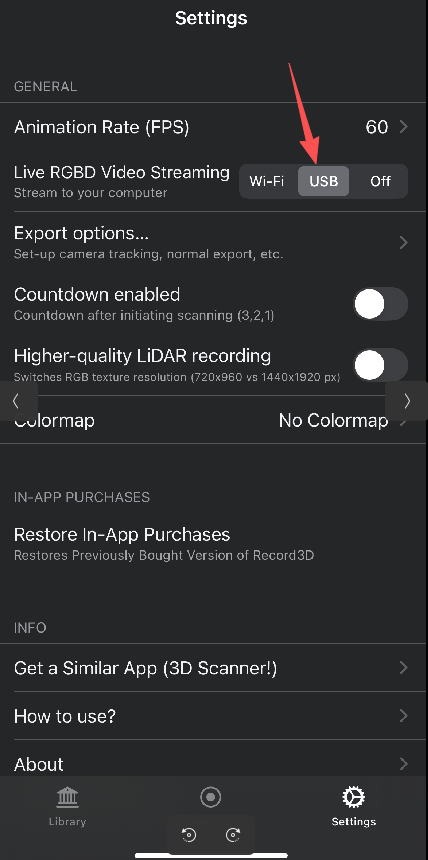
Record3DAPP设置:
需要APP购买USB的使用权限,然后这里设置为USB模式
- 回到
Record界面
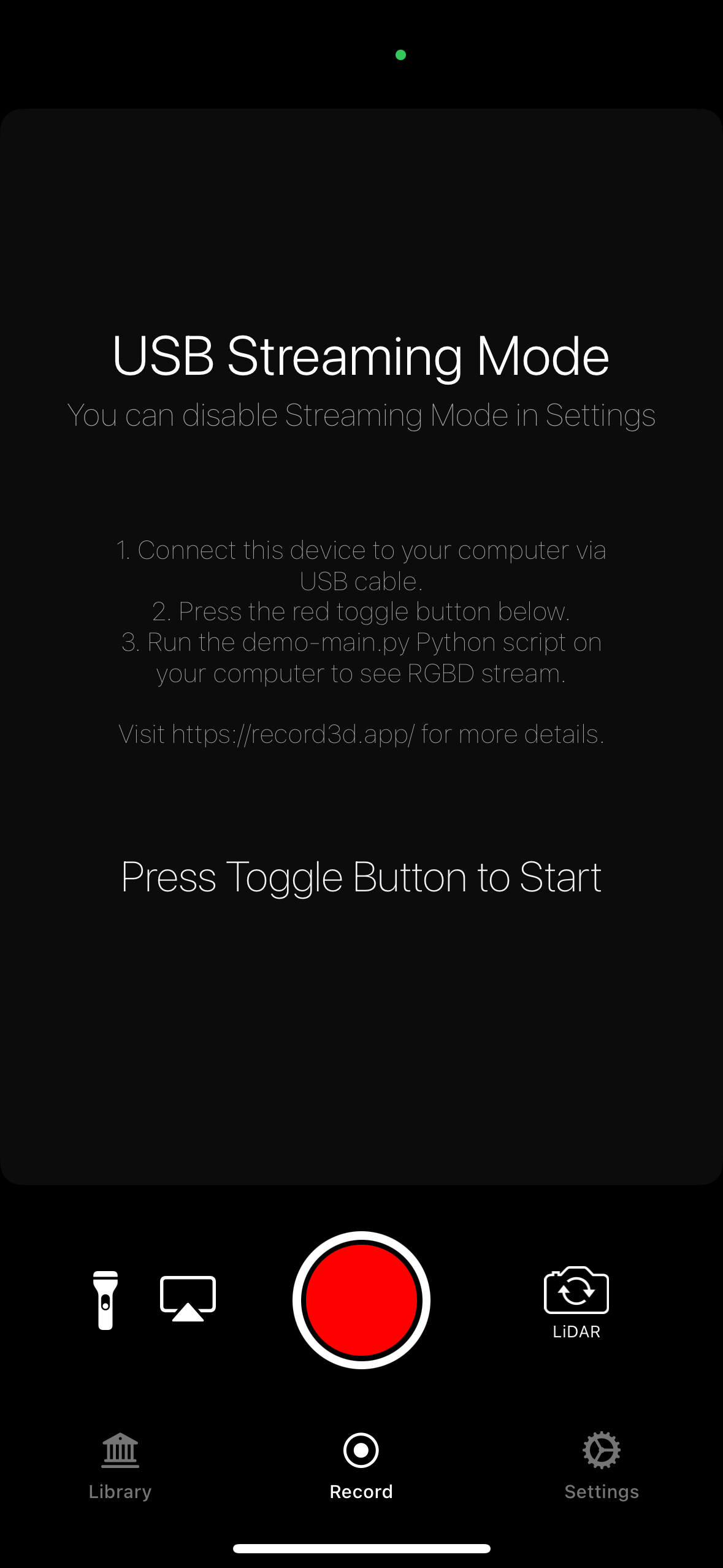
- 将手机和电脑进行连接
- 运行下面的程序,会显示找到了设备,APP上点击红色的启动按钮,PC端可以实时取流并显示。
- 官方
demo-main.py
python
import numpy as np
from record3d import Record3DStream
import cv2
from threading import Event
class DemoApp:
def __init__(self):
self.event = Event()
self.session = None
self.DEVICE_TYPE__TRUEDEPTH = 0
self.DEVICE_TYPE__LIDAR = 1
def on_new_frame(self):
"""
This method is called from non-main thread, therefore cannot be used for presenting UI.
"""
self.event.set() # Notify the main thread to stop waiting and process new frame.
def on_stream_stopped(self):
print('Stream stopped')
def connect_to_device(self, dev_idx):
print('Searching for devices')
devs = Record3DStream.get_connected_devices()
print('{} device(s) found'.format(len(devs)))
for dev in devs:
print('\tID: {}\n\tUDID: {}\n'.format(dev.product_id, dev.udid))
if len(devs) <= dev_idx:
raise RuntimeError('Cannot connect to device #{}, try different index.'
.format(dev_idx))
dev = devs[dev_idx]
self.session = Record3DStream()
self.session.on_new_frame = self.on_new_frame
self.session.on_stream_stopped = self.on_stream_stopped
self.session.connect(dev) # Initiate connection and start capturing
def get_intrinsic_mat_from_coeffs(self, coeffs):
return np.array([[coeffs.fx, 0, coeffs.tx],
[ 0, coeffs.fy, coeffs.ty],
[ 0, 0, 1]])
def start_processing_stream(self):
while True:
self.event.wait() # Wait for new frame to arrive
# Copy the newly arrived RGBD frame
depth = self.session.get_depth_frame()
rgb = self.session.get_rgb_frame()
confidence = self.session.get_confidence_frame()
intrinsic_mat = self.get_intrinsic_mat_from_coeffs(self.session.get_intrinsic_mat())
camera_pose = self.session.get_camera_pose() # Quaternion + world position (accessible via camera_pose.[qx|qy|qz|qw|tx|ty|tz])
print(intrinsic_mat)
# You can now e.g. create point cloud by projecting the depth map using the intrinsic matrix.
# Postprocess it
if self.session.get_device_type() == self.DEVICE_TYPE__TRUEDEPTH:
depth = cv2.flip(depth, 1)
rgb = cv2.flip(rgb, 1)
rgb = cv2.cvtColor(rgb, cv2.COLOR_RGB2BGR)
# Show the RGBD Stream
cv2.imshow('RGB', rgb)
cv2.imshow('Depth', depth)
if confidence.shape[0] > 0 and confidence.shape[1] > 0:
cv2.imshow('Confidence', confidence * 100)
cv2.waitKey(1)
self.event.clear()
if __name__ == '__main__':
app = DemoApp()
app.connect_to_device(dev_idx=0)
app.start_processing_stream()- 增加获取
camera_pose,实时输出pose并记录存储到文件中。
python
import numpy as np
from record3d import Record3DStream
import cv2
from threading import Event
import time
import math
import csv
import os
class DemoApp:
def __init__(self):
self.event = Event()
self.session = None
self.DEVICE_TYPE__TRUEDEPTH = 0
self.DEVICE_TYPE__LIDAR = 1
# 初始化CSV文件相关
self.csv_file = None
self.csv_writer = None
self.init_csv_file()
def init_csv_file(self):
"""初始化CSV文件,写入表头"""
# 生成带时间戳的文件名,避免重复
timestamp = time.strftime("%Y%m%d_%H%M%S", time.localtime())
self.csv_file_path = f"camera_pose_data_{timestamp}.csv"
# 打开文件并写入表头
self.csv_file = open(self.csv_file_path, 'w', newline='', encoding='utf-8')
self.csv_writer = csv.writer(self.csv_file)
# 表头:时间戳,x,y,z,rx,ry,rz
self.csv_writer.writerow(['timestamp', 'x', 'y', 'z', 'rx', 'ry', 'rz'])
print(f"相机位姿数据将保存到: {self.csv_file_path}")
def quaternion_to_euler(self, qx, qy, qz, qw):
"""
四元数转欧拉角(单位:弧度)
四元数格式:qx, qy, qz, qw
欧拉角顺序:roll(x), pitch(y), yaw(z)
"""
# 计算roll (x轴旋转)
sinr_cosp = 2 * (qw * qx + qy * qz)
cosr_cosp = 1 - 2 * (qx * qx + qy * qy)
roll = math.atan2(sinr_cosp, cosr_cosp)
# 计算pitch (y轴旋转)
sinp = 2 * (qw * qy - qz * qx)
# 限制pitch范围在[-π/2, π/2]
pitch = math.asin(max(min(sinp, 1), -1))
# 计算yaw (z轴旋转)
siny_cosp = 2 * (qw * qz + qx * qy)
cosy_cosp = 1 - 2 * (qy * qy + qz * qz)
yaw = math.atan2(siny_cosp, cosy_cosp)
return roll, pitch, yaw
def on_new_frame(self):
"""
This method is called from non-main thread, therefore cannot be used for presenting UI.
"""
self.event.set() # Notify the main thread to stop waiting and process new frame.
def on_stream_stopped(self):
print('Stream stopped')
def connect_to_device(self, dev_idx):
print('Searching for devices')
devs = Record3DStream.get_connected_devices()
print('{} device(s) found'.format(len(devs)))
for dev in devs:
print('\tID: {}\n\tUDID: {}\n'.format(dev.product_id, dev.udid))
if len(devs) <= dev_idx:
raise RuntimeError('Cannot connect to device #{}, try different index.'
.format(dev_idx))
dev = devs[dev_idx]
self.session = Record3DStream()
self.session.on_new_frame = self.on_new_frame
self.session.on_stream_stopped = self.on_stream_stopped
self.session.connect(dev) # Initiate connection and start capturing
def get_intrinsic_mat_from_coeffs(self, coeffs):
return np.array([[coeffs.fx, 0, coeffs.tx],
[ 0, coeffs.fy, coeffs.ty],
[ 0, 0, 1]])
def start_processing_stream(self):
try:
while True:
self.event.wait() # Wait for new frame to arrive
# 获取当前时间戳(毫秒级)
current_timestamp = int(time.time() * 1000)
# Copy the newly arrived RGBD frame
depth = self.session.get_depth_frame()
rgb = self.session.get_rgb_frame()
confidence = self.session.get_confidence_frame()
intrinsic_mat = self.get_intrinsic_mat_from_coeffs(self.session.get_intrinsic_mat())
camera_pose = self.session.get_camera_pose() # Quaternion + world position (accessible via camera_pose.[qx|qy|qz|qw|tx|ty|tz])
print("="*50)
print("Intrinsic Matrix (内参矩阵):")
print(intrinsic_mat)
# 初始化数据变量
tx = ty = tz = rx = ry = rz = None
# 获取并输出相机位姿信息
if camera_pose is not None:
# 提取四元数(姿态)
qx = camera_pose.qx
qy = camera_pose.qy
qz = camera_pose.qz
qw = camera_pose.qw
# 提取世界坐标(位置)
tx = camera_pose.tx
ty = camera_pose.ty
tz = camera_pose.tz
# 四元数转欧拉角
rx, ry, rz = self.quaternion_to_euler(qx, qy, qz, qw)
# 输出位姿信息
print("\nCamera Pose (相机位姿):")
print(f"Quaternion (四元数) - qx: {qx:.6f}, qy: {qy:.6f}, qz: {qz:.6f}, qw: {qw:.6f}")
print(f"World Position (世界坐标) - tx: {tx:.6f}m, ty: {ty:.6f}m, tz: {tz:.6f}m")
print(f"Euler Angles (欧拉角/弧度) - rx: {rx:.6f}, ry: {ry:.6f}, rz: {rz:.6f}")
print(f"Euler Angles (欧拉角/角度) - rx: {math.degrees(rx):.2f}°, ry: {math.degrees(ry):.2f}°, rz: {math.degrees(rz):.2f}°")
else:
print("\nCamera Pose: Not available (相机位姿不可用)")
# 保存数据到CSV文件(仅当有有效位姿数据时)
if all(v is not None for v in [tx, ty, tz, rx, ry, rz]):
self.csv_writer.writerow([
current_timestamp,
round(tx, 6),
round(ty, 6),
round(tz, 6),
round(rx, 6),
round(ry, 6),
round(rz, 6)
])
# 立即刷新缓冲区,确保数据实时写入
self.csv_file.flush()
os.fsync(self.csv_file.fileno())
else:
self.csv_writer.writerow([current_timestamp, None, None])
# 立即刷新缓冲区,确保数据实时写入
self.csv_file.flush()
os.fsync(self.csv_file.fileno())
# You can now e.g. create point cloud by projecting the depth map using the intrinsic matrix.
# Postprocess it
if self.session.get_device_type() == self.DEVICE_TYPE__TRUEDEPTH:
depth = cv2.flip(depth, 1)
rgb = cv2.flip(rgb, 1)
rgb = cv2.cvtColor(rgb, cv2.COLOR_RGB2BGR)
# Show the RGBD Stream
cv2.imshow('RGB', rgb)
cv2.imshow('Depth', depth)
if confidence.shape[0] > 0 and confidence.shape[1] > 0:
cv2.imshow('Confidence', confidence * 100)
cv2.waitKey(1)
self.event.clear()
finally:
# 清理资源
cv2.destroyAllWindows()
if self.csv_file:
self.csv_file.close()
print(f"程序退出,数据文件已关闭: {self.csv_file_path}")
if __name__ == '__main__':
app = DemoApp()
try:
app.connect_to_device(dev_idx=0)
app.start_processing_stream()
except Exception as e:
print(f"程序异常: {e}")
if app.csv_file:
app.csv_file.close()
cv2.destroyAllWindows()